



















ROS与QT语言入门教程-搭建开发环境
ROS与QT语言入门教程-搭建开发环境
说明:
- 介绍如何搭建ROS与QT开发环境和创建ROS与QT GUI模板
运行环境
- 系统的版本:Ubuntu16.04
- ROS的版本:Kinetic
- Qt的版本:5.9.1
操作步骤
- 安装并配置ROS环境
- 安装ROS的QT插件ros_qtc_plugin
注:由于插件的更新,不需要安装qtcreator,插件自己依赖安装
$ sudo add-apt-repository ppa:levi-armstrong/qt-libraries-xenial
$ sudo add-apt-repository ppa:levi-armstrong/ppa
$ sudo apt update && sudo apt install qt57creator
$ sudo apt install qt57creator-plugin-ros
- 安装ROS-QT依赖的两个软件包,用于创建ROS-QT GUI模板
$ sudo apt-get install ros-kinetic-qt-create
$ sudo apt-get install ros-kinetic-qt-build
- 创建ROS-QT GUI模板
$ cd ~/catkin_ws/src
$ catkin_create_qt_pkg qtros
- 启动qtcreator, 导入qtros包
$ qtcreator-ros
在catkin_ws工作空间下,创建ROS工作空间工程,点击上面菜单栏中
File->New File or Project->Other Project->Ros Workspace
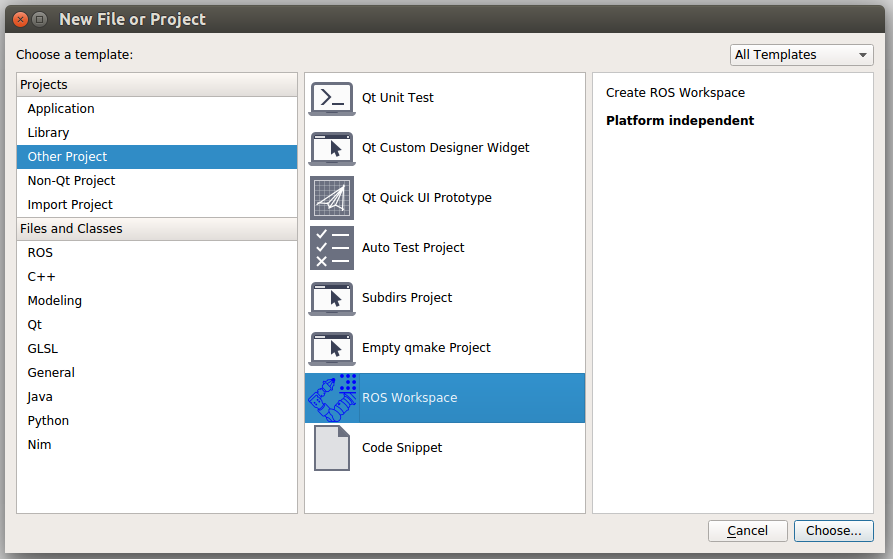
填写工作空间名称,如qtws,选择工作空间路径为,比如~/catkin_ws ,即可导入工作空间下所有的包,包括刚才建立的qtros包
导入后,选择qtros包src下的main.cpp,再点界面左下角的锤子符号进行编译工作空间
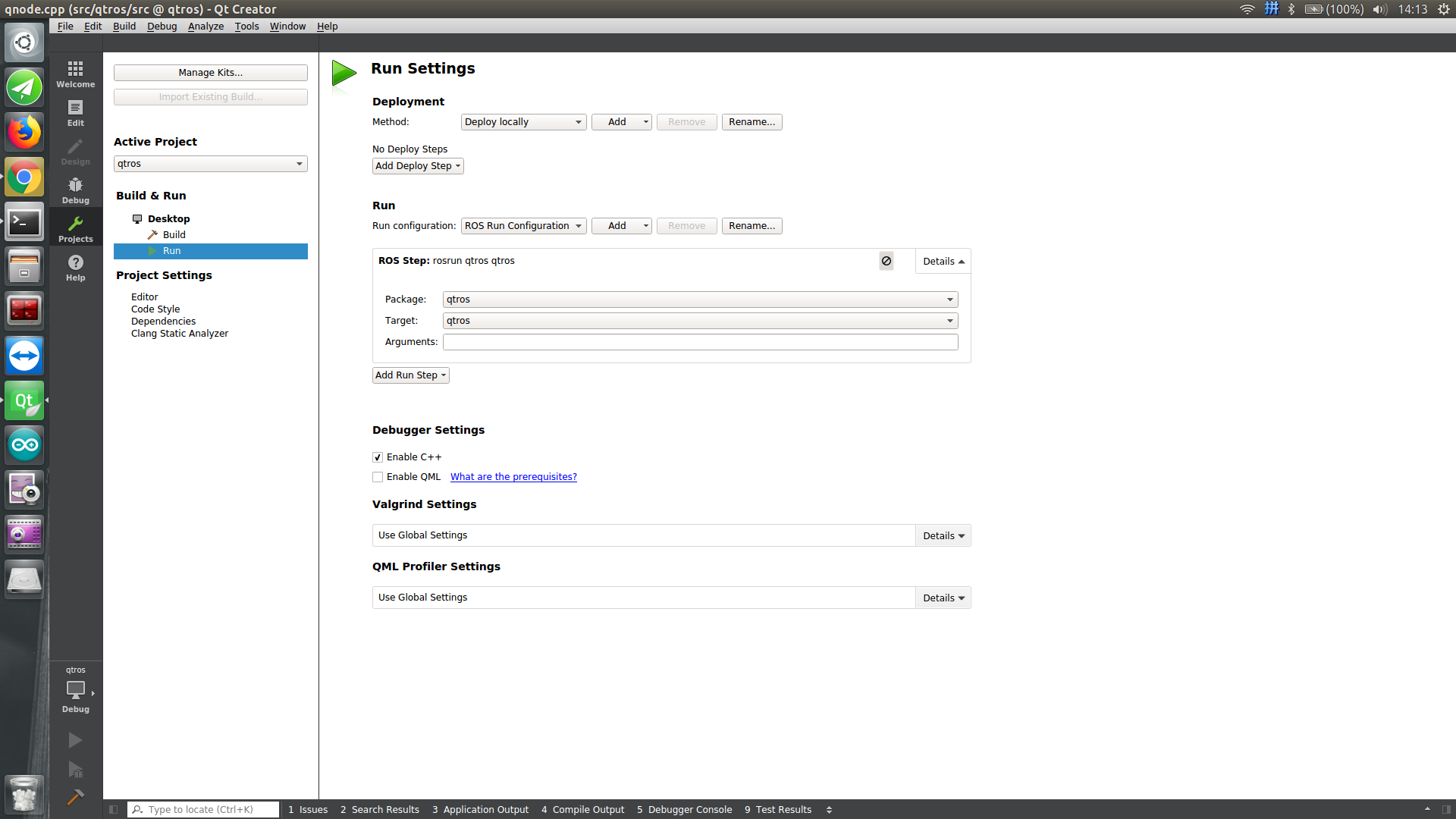
修改运行配置,添加
ROS Run Step和ROS Attach to Node,点击左侧栏的Projects->Run Settings->Add Run Step->ROS Run Step->ROS Attach to Node
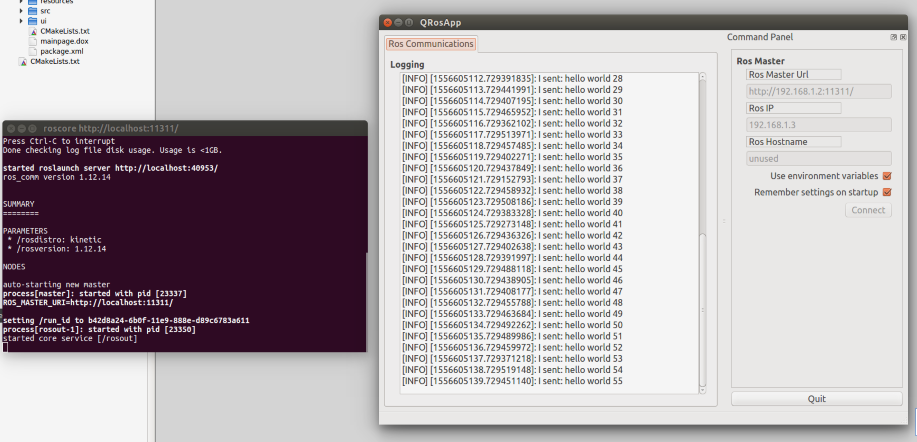
启动节点管理器,查看ROS_MASTER_URI
$ roscore
点击左下角
“绿色三角”Run,运行两种连接方式:
- 填写对应的
Ros_Master_Url、Ros IP和Ros Hostname - 勾选
Use environment variables
- 填写对应的
点击Connect按钮
参考资料
- https://www.cnblogs.com/casperwin/p/6206193.html
- http://wiki.ros.org/qt_create/Tutorials/Qt%20App%20Templates
- https://github.com/ros-industrial/ros_qtc_plugin/issues?q=is%3Aissue+is%3Aclosed
- http://wiki.ros.org/IDEs#Qt_Creator_Plugin_for_ROS
- https://blog.csdn.net/u013453604/article/details/52186375#t12
- https://blog.csdn.net/LOVE1055259415/article/details/80575432
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号