



















OpenManipulator机械臂入门教程-相机应用
说明
- 介绍如何安装多种相机的ros驱动和与AR识别的配合使用
- 测试环境:ROS Kinetic + Ubuntu 16.04 + OpenManipulator-X + Realsense D435i
Astra Pro

- 相机规格
| Items | Specifications |
|---|---|
| RGB Image Resolution and Frame Rate | 1280 x 720, @30fps |
| Depth Imgae Resolution and Frame Rate | 640 x 480, @30fps |
| FOV (Field-of-View) | 60°H x 49.5°V x 73°D |
| Range | 0.6m - 8m |
| USB Port | USB 2.0 |
| Dimensions | 165mm x 30mm x 40mm |
| Operating Systems | Android/Linux/Windows 7/8/10 |
| SDK | Astra SDK or OpenNI |
| Microphones | 2 (Built - in) |
安装相关的ROS包
安装相关的ROS包
$ sudo apt-get install ros-kinetic-rgbd-launch ros-kinetic-libuvc-camera
$ cd ~/catkin_ws/src
$ git clone https://github.com/orbbec/ros_astra_camera.git
$ git clone https://github.com/ROBOTIS-GIT/ros_astra_launch.git
$ cd ~/catkin_ws && catkin_make
$ roscd astra_camera && ./scripts/create_udev_rules
- 测试使用
$ sudo chmod a+rw /dev/bus/usb/${USB}/${PORT}
$ roslaunch ros_astra_launch astra_pro.launch
- 打开rqt_image_view查看图像
$ rqt_image_view
Realsense D435

- 相机规格
| Items | Specifications |
|---|---|
| Use Environment | Indoor/Outdoor |
| RGB Sensor Resolution and Frame Rate | 1920 x 1080 at 30 fps |
| RGB Sensor FOV | 69.4°(H) x 42.5°(V) x 77°(D) (+/- 3°) |
| Depth Stream Output Resolution | Up to 1280 x 720 |
| Depth Stream Output Frame Rate | Up to 90 fps |
| Depth Field of View (FOV) | 85.2°(H) x 58°(V) x 94°(D) (+/- 3°) |
| Minimum Depth Distance (Min-Z) | 0.2m |
| Maximum Range | Approx.10 meters |
| Dimension | 90 mm x 25 mm x 25 mm |
| Connectors | USB 3.0 Type - C |
安装相关的ROS包
安装相关的ROS包
$ sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
$ sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
$ sudo apt-get install librealsense2-dev librealsense2-utils ros-kinetic-rgbd-launch ros-kinetic-ddynamic-reconfigure
$ cd ~/catkin_ws/src
$ git clone https://github.com/intel-ros/realsense.git
$ cd ~/catkin_ws && catkin_make
- 测试使用
$ roslaunch realsense2_camera rs_camera.launch
- 打开rqt_image_view查看图像
$ rqt_image_view
Raspberry Pi Camera V2
- 在树莓派上安装V2相机的ROS驱动:参考链接
AR Marker
- 安装相关的ROS包和软件
$ sudo apt-get install ros-kinetic-ar-track-alvar ros-kinetic-ar-track-alvar-msgs ros-kinetic-image-proc
$ cd ~/openManipulator_ws/src
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_perceptions.git
$ cd ~/openManipulator_ws&& catkin_make
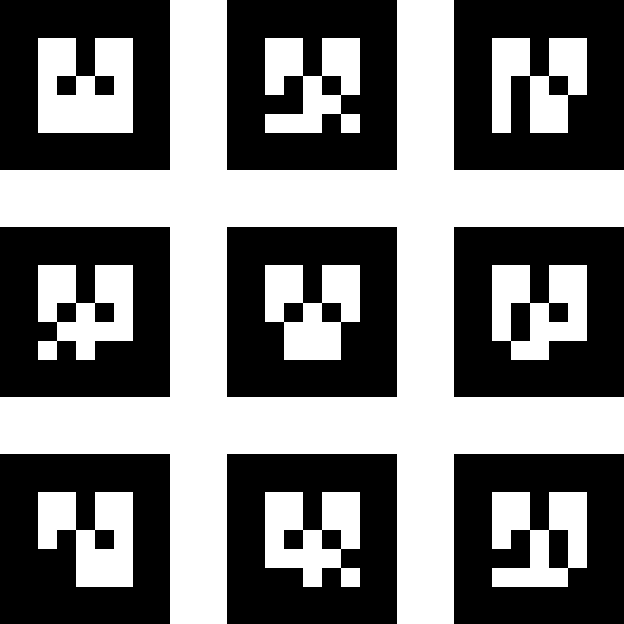
- 将可以下面AR标签图打印下来
Astra Pro
启动相机
$ roslaunch open_manipulator_ar_markers ar_pose.launch camera_model:=astra_pro
Realsense D435
启动相机
$ roslaunch open_manipulator_ar_markers ar_pose.launch camera_model:=realsense_d435
Raspberry Pi Camera V2
[Raspberry Pi] 启动相机
$ roslaunch open_manipulator_camera raspicam.launch
- [Remote PC] 启动相机
$ roslaunch open_manipulator_ar_markers ar_pose.launch camera_model:=realsense_d435
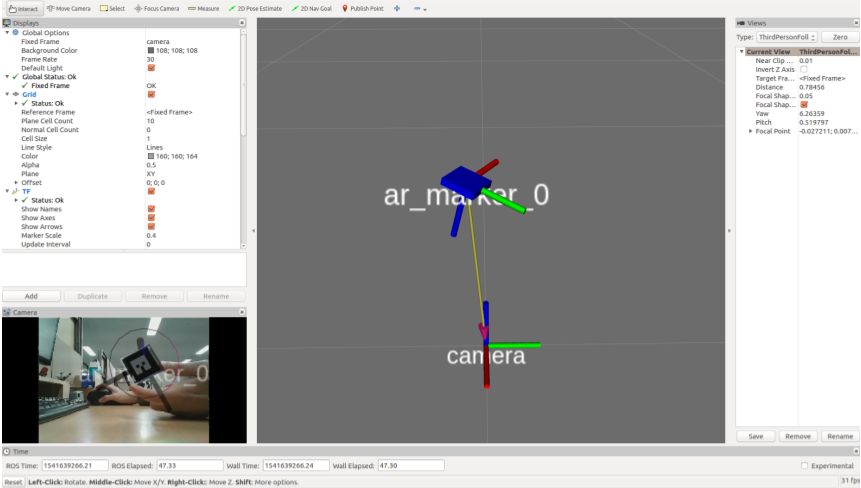
- 接下来可以在打开的RViz界面上看到,相机已经识别到AR标志,同时AR标志与相机的位姿在RViz上显示
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号