



















OpenManipulator机械臂入门教程-控制板设置
说明
- 在ROS环境下,可以用U2D2和OpenCR控制板来控制OpenManipulator机械臂
- 本教程介绍如何设置U2D2和OpenCR控制板
U2D2设置

- [PC] 启动ROSCORE
$ roscore
- [PC] 设置USB延迟时间
$ rosrun open_manipulator_controller create_udev_rules
TIP: This entered command set USB latency timer to 1 ms. If you would like to see the setting, run the following command in a terminal. cat
/sys/bus/usb-serial/devices/ttyUSB0/latency_timer
OpenCR设置

安装与配置Arduino IDE:参考链接
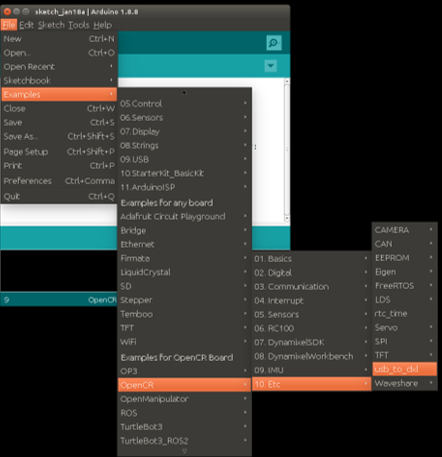
在Arduino IDE上找到
usb to dxl示例Examples→OpenCR→10.Etc→usb_to_dxl
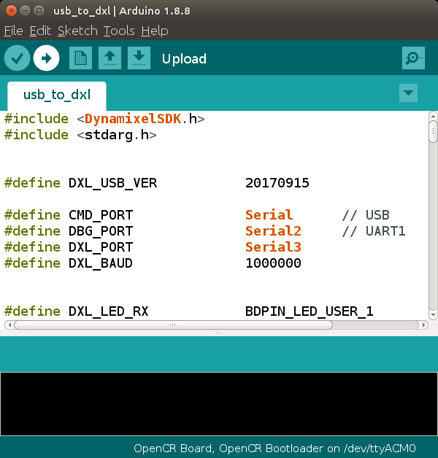
- 将
usb to dxl示例上传到OpenCR板上
- 出现
jump_to_fw表示上传成功
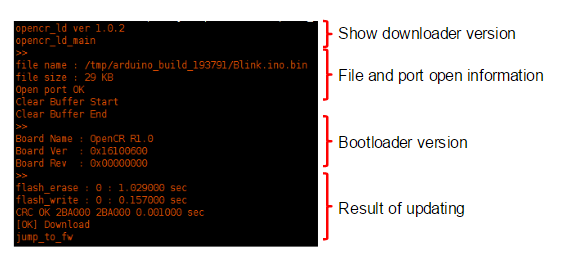
注:若上传时一直出现
cmd_read_board_name fail: 0xF020的错误,请参考Turtlebot3中级教程-OpenCR固件恢复进行固件恢复
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号