



















OpenManipulator机械臂入门教程-硬件介绍
说明
- 介绍OpenManipulator机械臂的硬件组成以及相关的硬件参数
概述

OpenManipulator机械臂是一个完全开源的机器人操作平台
OpenManipulator机械臂基于ROS和OpenSource。OpenManipulator机械臂在硬件上完全兼容TurtleBot3。使用者同时可以使用MoveIt!来控制它。
OpenManipulato机械臂的大多数组件都以STL文件的方式上传到网络,以便使用者下载。其还支持使用者根据自己的需要去修改连接臂的长度或更改成其他结构。
OpenManipulato机械臂同时支持Gazebo进行仿真
在ROS环境中,OpenManipulato机械臂支持在U2D2+U2D2电源转接板或者OpenCR板上使用;若在嵌入式系统上运行时,请准备OpenCR板。在这两种情况下,都要使用12V5A电源给DYNAMIXEL舵机供电。

硬件介绍
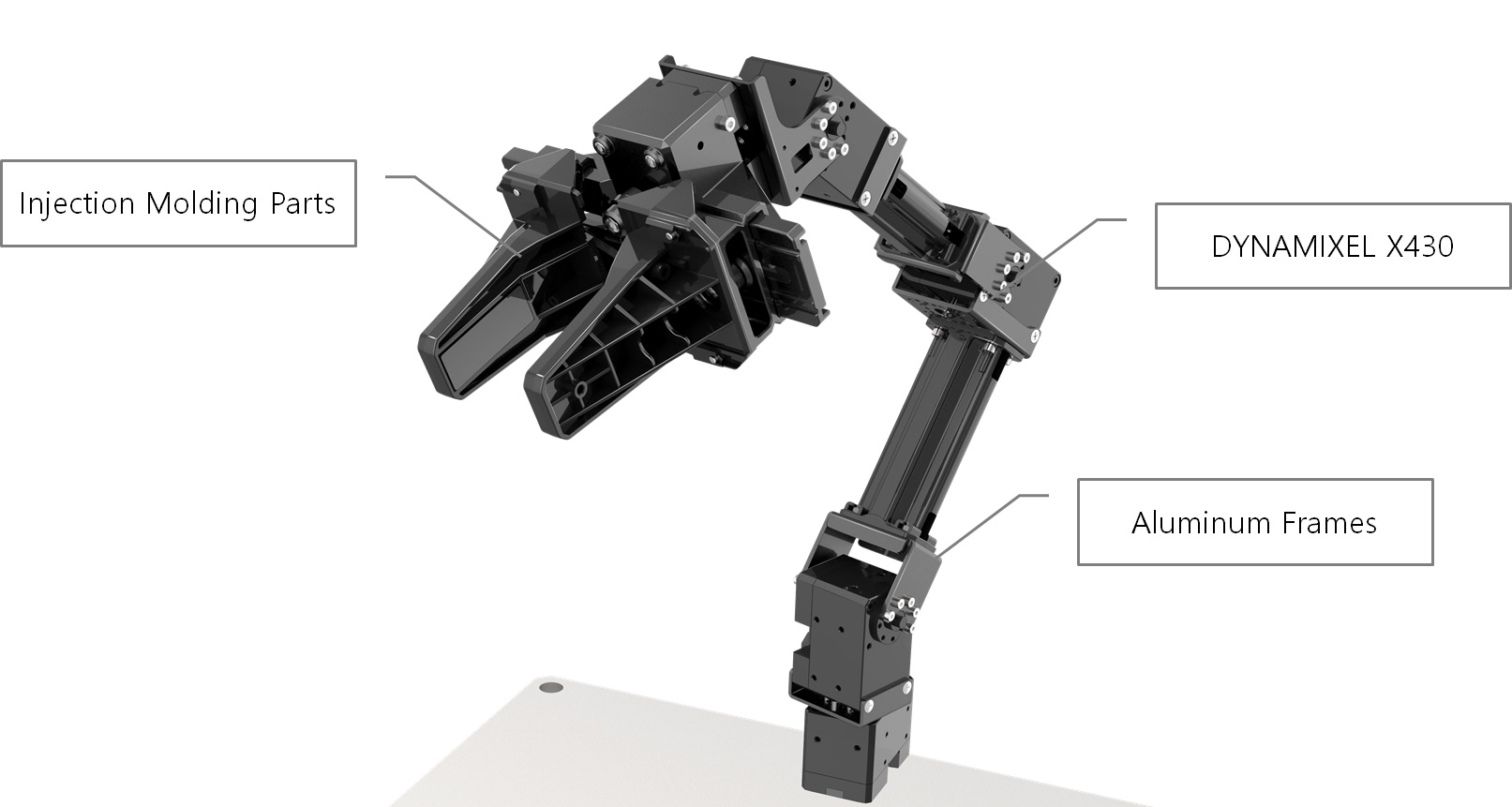
- 硬件相关参数
| Items | Unit | RM-X52-TNM |
|---|---|---|
| Actuator | Dynamixel XM430-W350-T | |
| Input Voltage | V | 12 |
| DOF | - | 5 (4 DOF + 1 DOF Gripper) |
| Payload | g | 500 |
| Speed(Joint) | RPM | 46 |
| Weight | kg (lb) | 0.70 (1.54) |
| Reach | mm (in) | 380 (14.9) |
| Gripper Stroke | mm (in) | 20 |
| Communication | - | TTL Level Multidrop BUS |
| Software | - | ROS, Dynamixel SDK, Arduino, Processing |
| Main Controller | - | PC, OpenCR |
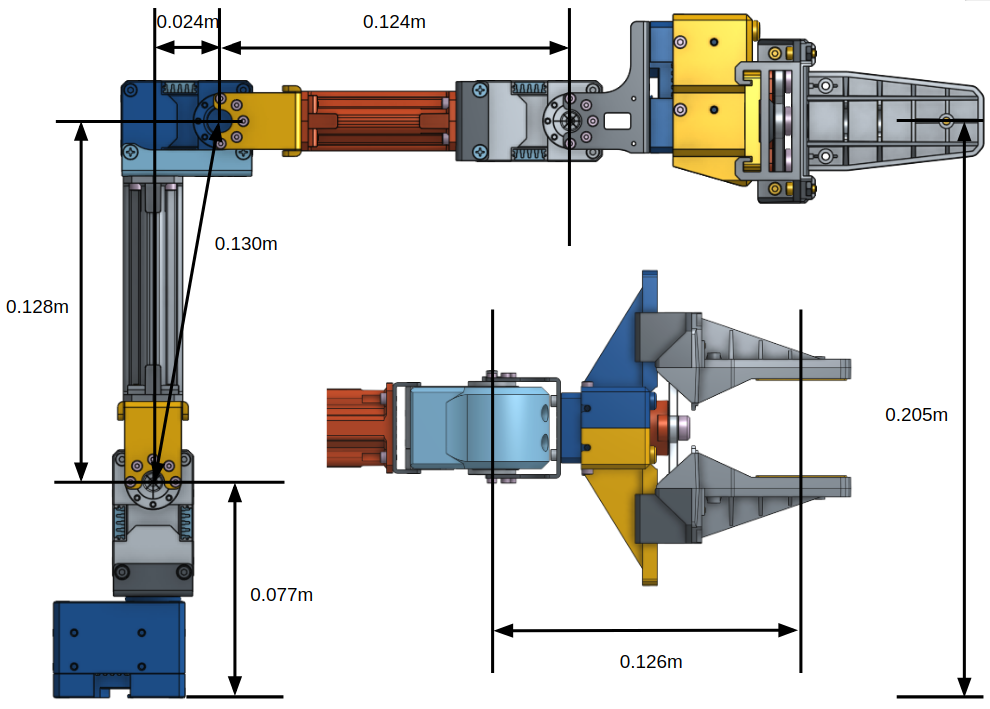
- 硬件尺寸
硬件组装
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号