



















ROS2探索总结-13.话题与服务接口定义
ROS2探索总结-13.话题与服务接口定义
概要:
ROS是一个分布式的机器人软件框架,涉及多节点之间的数据通信,绝大部分是基于话题或者服务完成的。
话题和服务在节点之间打通了一条隧道,其中来往的车辆就是需要传输的数据。每个数据长什么样,使用什么样的数据结构,可以使用ROS中已有的定义,也可以根据需求使用语言无关的接口自己定义,在编译过程时,再基于接口定义生成多种语言的代码。
这是ROS中非常重要、非常基础的功能,为ROS的松耦合提供了基础,在ROS2中依然保留了这项接口定义的功能。本篇我们就来看看ROS2中关于接口定义的方法。
一、话题接口定义
ROS2中的话题接口称为消息,描述文件以.msg结尾,放置在功能包的msg文件夹下,包含字段(fields)和常量(constants)两部分。
1. 字段
字段使用以下方式定义,包含类型和名称,使用空格分开:
fieldtype1 fieldname1 fieldtype2 fieldname2 fieldtype3 fieldname3
eg:
int32 my_int
string my_string
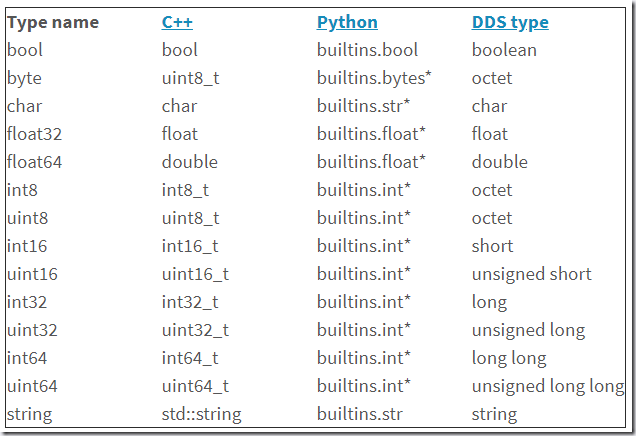
- 这里的字段类型可以使用ROS中的标准数据结构定义:
也可以使用功能包中已有的消息定义,如: “geometry_msgs/PoseStamped”等。
还可以定义数组,包括数组的长度和范围:
variable-length array[] fixed-length array[C], bounded-length array[<=C]
eg:
int32[] unbounded_integer_array
int32[5] five_integers_array
int32[<=5] up_to_five_integers_array
string string_of_unbounded_size
string<=10 up_to_ten_characters_string
string[<=5] up_to_five_unbounded_strings
string<=10[] unbounded_array_of_string_up_to_ten_characters each
string<=10[<=5] up_to_five_strings_up_to_ten_characters_each
- 另外,使用以下结构,每个字段还可以设置一个默认值:
fieldtype fieldname fielddefaultvalue
eg:
uint8 x 42
int16 y -2000
string full_name "John Doe"
int32[] samples [-200, -100, 0, 100, 200]
- 2. 常量
- 常量类似程序中的宏定义,和上边的默认值有点像,只是不允许修改。
constanttype CONSTANTNAME=constantvalue
eg:
int32 X=123
int32 Y=-123
string FOO="foo"
string EXAMPLE='bar'
这里需要注意,字段的名称必须是大写字母组成。
二、服务接口定义
服务接口的描述文件以.srv结尾,放置在功能包中的srv文件夹里。
服务描述文件中包含请求和应答两个部分的消息定义,中间使用“---”分开:
string str --- string str
可以调用已有的消息接口定义,如:
#request constants
int8 FOO=1
int8 BAR=2#request fields
int8 foobar
another_pkg/AnotherMessage msg
---
#response constants
uint32 SECRET=123456#response fields
another_pkg/YetAnotherMessage val
CustomMessageDefinedInThisPackage value
uint32 an_integer
- 这里需要注意,服务接口中可以调用消息接口,但是不能嵌套调用服务接口!
三、话题接口配置示例
- 这里创建一个描述通信录事项的消息定义,在功能包中创建msg文件,并在其中创建Contact.msg文件内容:
bool FEMALE=true
bool MALE=false
string first_name
string last_name
bool gender
uint8 age
string address
- 为了将以上定义编译成不同编程语言对应的文件,还需要配置package.xml和CMakeLists.txt。
- package.xml
- 在package.xml文件中添加以下内容:
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
2.CMakeLists.txt
- 在CMakeLists.txt文件中添加以下内容:
find_package(rosidl_default_generators REQUIRED)
set(msg_files
"msg/Contact.msg"
)
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
)
ament_export_dependencies(rosidl_default_runtime)
四、服务接口配置示例
- srv文件类似,在srv文件夹下创建AddTwoFloats.srv文件,内容如下:
float64 a
float64 b
---
float64 sum
CMakeLists.txt文件中添加:
set(srv_files
"srv/AddTwoFloats.srv")
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
${srv_files}
)
五、编译生成代码文件
- 最后,就可以编译功能包了,定义的接口会生成对应的程序文件,自动放置在install文件夹中,例如以上接口示例生成的头文件如下:
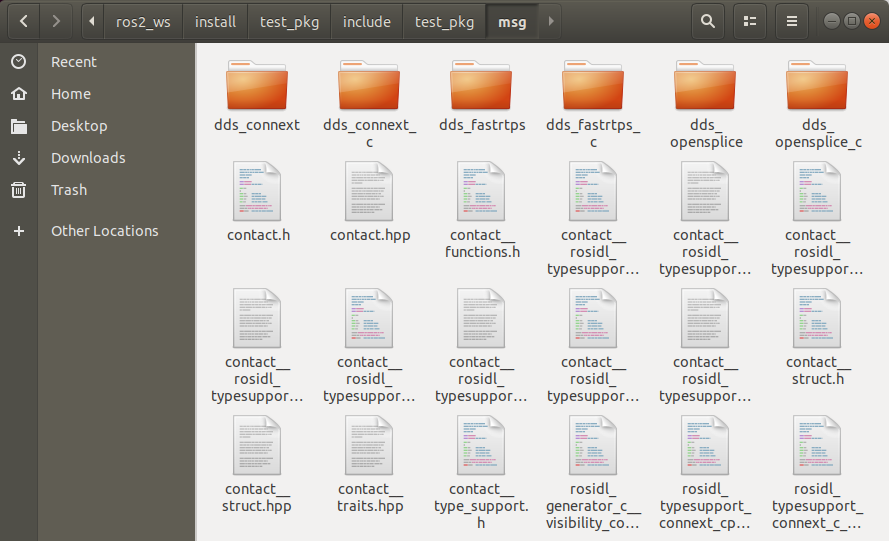
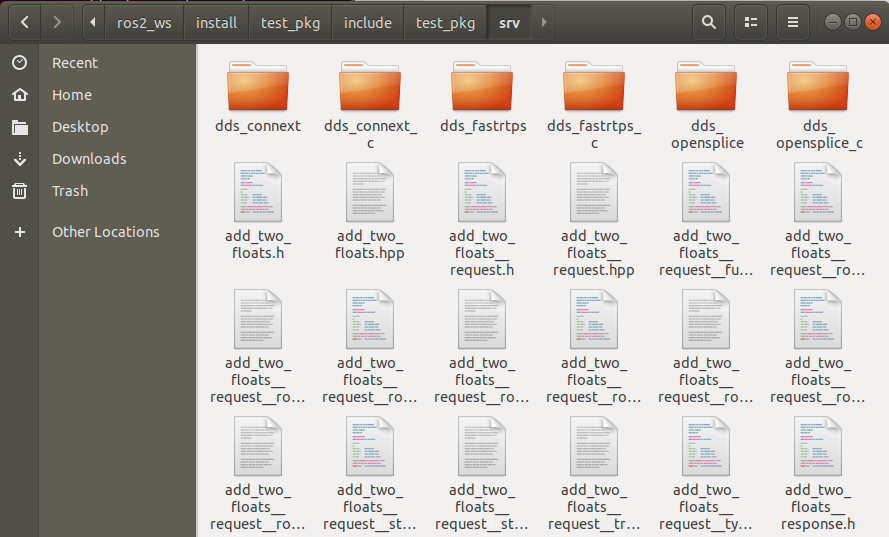
- 有了这些程序文件,后续我们就可以在程序中调用啦!
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号