



















ROS2探索总结-10.ROS 2基础工具使用入门
ROS2探索总结-10.ROS 2基础工具使用入门
说明:
- ROS 2提供了一个简单的机器人演示——dummy_robot,可以让我们快速熟悉ROS 2中各种开发工具的基本使用方法。
一、运行dummy robot与rviz2
- 运行以下命令,dummy robot例程跑起来:
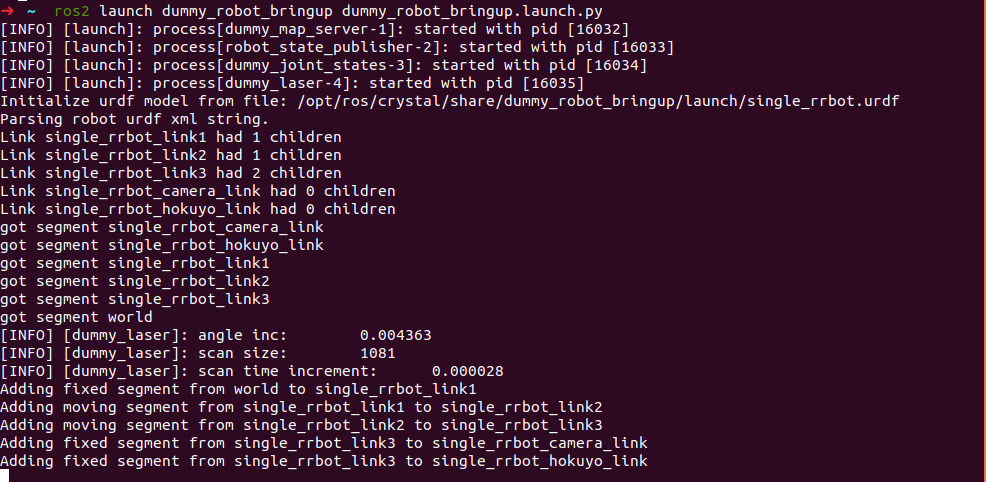
$ ros2 launch dummy_robot_bringup dummy_robot_bringup.launch.py
- 终端中看到如下提示信息,说明启动成功:
Screenshot from 2018-12-20 16-42-11
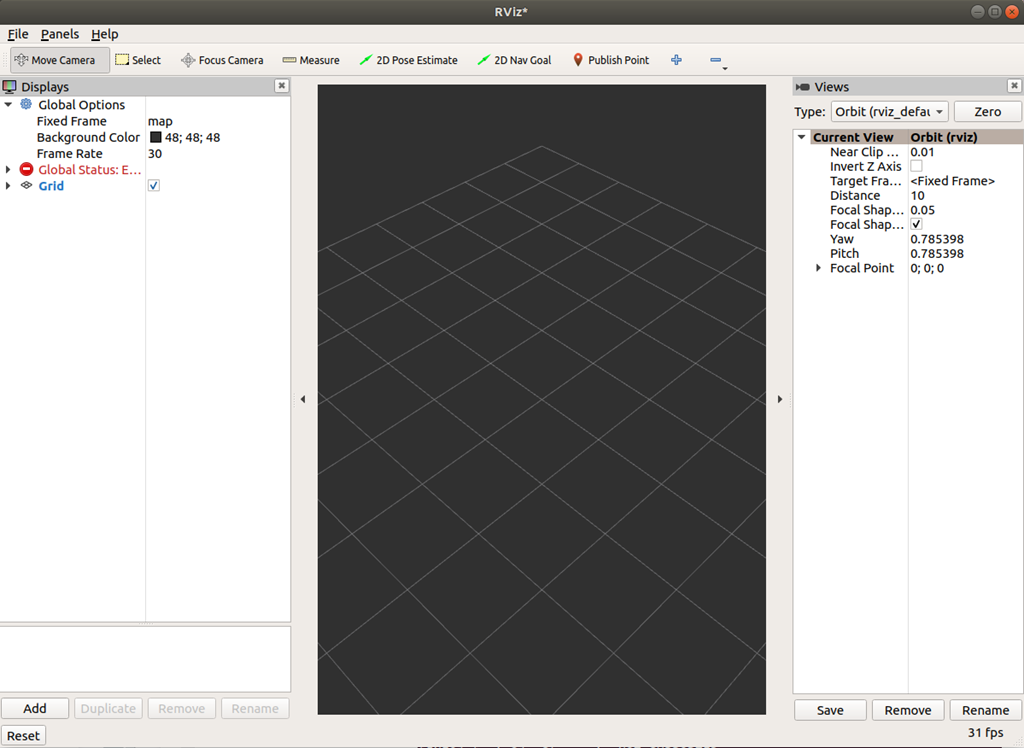
- 然后启动大家熟悉的rviz,不过在ROS 2中叫做rviz2,可以直接使用“rviz2”命令启动:
- rviz2的界面大家一定非常熟悉,因为它和ROS 1中的rviz——一模一样!

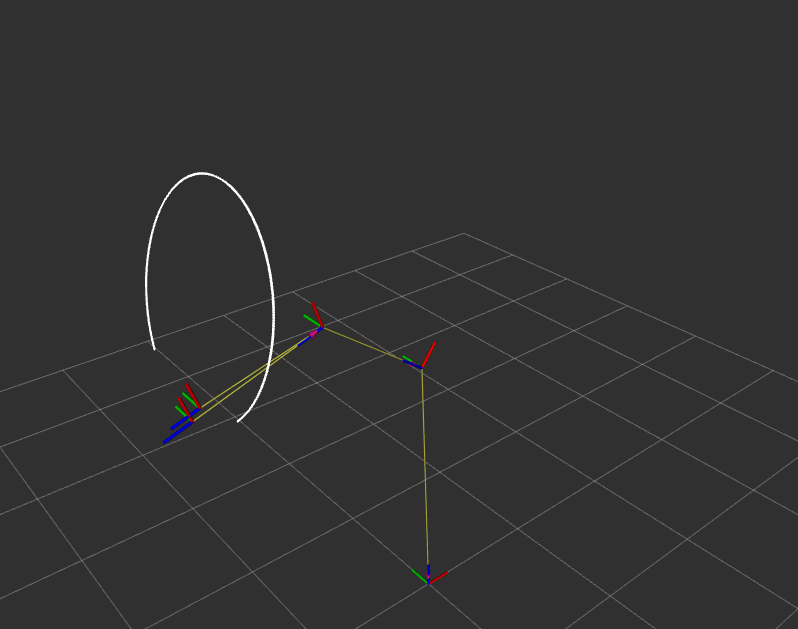
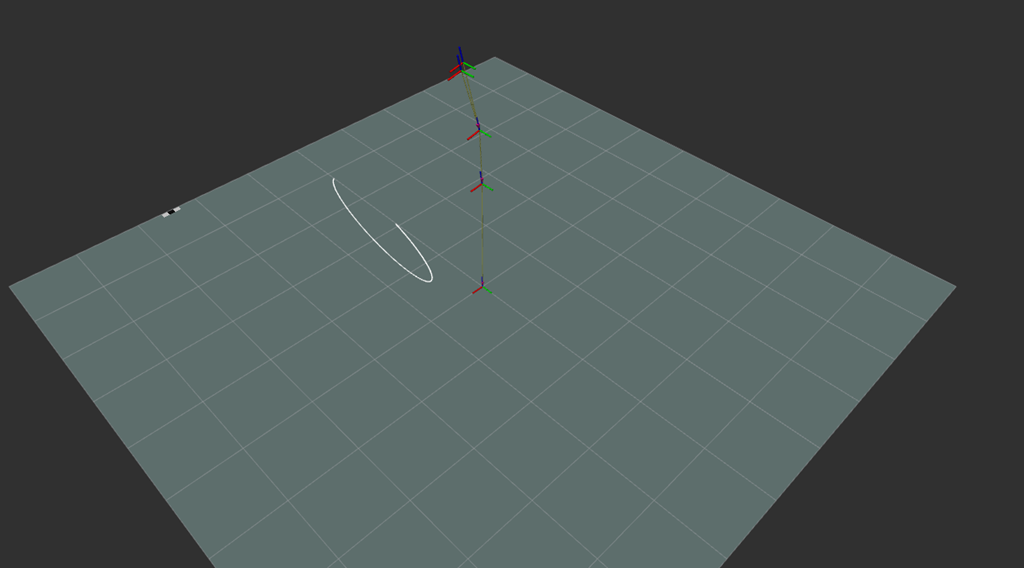
- 点击Add按键添加一个tf显示插件,修改Fixed Frame为world,就可以看到dummy robot动态的tf效果啦。不过dummy robot并没有可视化的外观,所以添加RobotModel插件并看不到模型。
二、命令行基础使用
ROS 2将所有命令集成到了“ros2”命令中,我们就来看看这个高度集成的命令能够干什么吧。
首先我们想要了解当前系统运行了哪些节点,可以使用如下命令查看:
$ ros2 node list
- 我们可以看到有不少节点在运行,
dummy_map_server
dummy_laser
dummy_joint_states
robot_state_publisher
- dummy_laser节点发布一个虚拟的激光数据,在rviz2中添加一个激光雷达的数据显示插件,就可以看到可视化的效果:

- dummy_map_server节点发布一个简单的空白地图,并保持一定频率更新,地图边缘有一个黑色方块随着更新频率移动。在rviz2中添加一个map显示插件,就可以看到这个地图了:
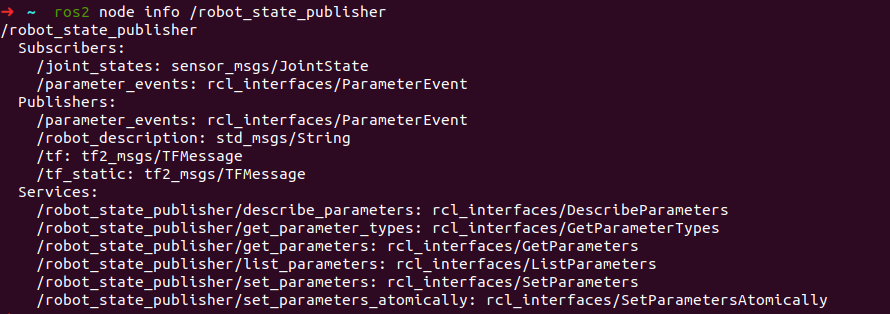
- dummy_joint_states和robot_state_publisher这两个节点大家应该很熟悉了,和ROS 1中的功能完全一样,一个实时发布机器人的关节状态,另外一个订阅此状态,并且根据机器人的模型更新tf变换。我们可以使用以下命令查看节点的相关信息:
$ ros2 node info /robot_state_publisher
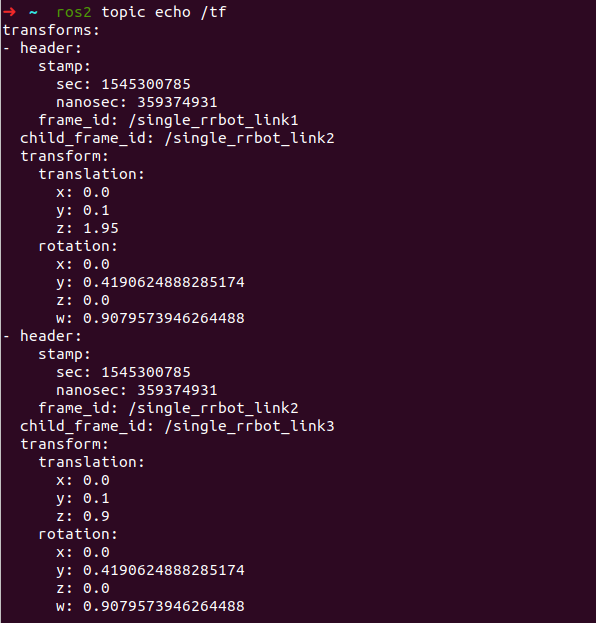
- 使用以下命令可以查看tf话题的具体数据内容:
$ ros2 topic echo /tf
三、launch文件
在运行dummy robot的时候,大家就发现我们启动了一个launch文件,貌似和ROS 1当中的launch有点不同,让我们来一探究竟。
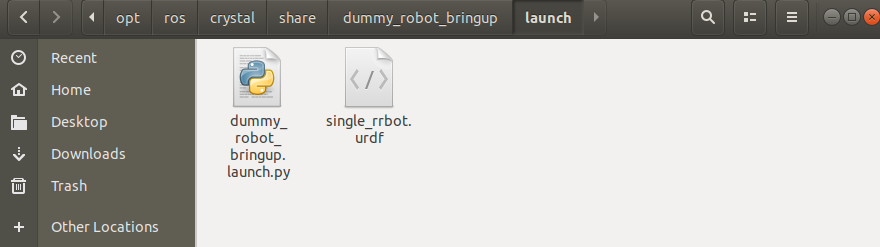
这个dummy_robot_bringup.launch.py文件在如下ROS 2的安装路径下:
- 打开之后的所有内容如下:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
# TODO(wjwwood): Use a substitution to find share directory once this is implemented in launch
urdf = os.path.join(get_package_share_directory('dummy_robot_bringup'),
'launch', 'single_rrbot.urdf')
return LaunchDescription([
Node(package='dummy_map_server', node_executable='dummy_map_server', output='screen'),
Node(package='robot_state_publisher', node_executable='robot_state_publisher',
output='screen', arguments=[urdf]),
Node(package='dummy_sensors', node_executable='dummy_joint_states', output='screen'),
Node(package='dummy_sensors', node_executable='dummy_laser', output='screen')
])
乍看这个launch文件,大家可能一时反应不过来,这是python程序代码么?
ROS中launch系统的主要目的是启动并配置节点,ROS 1的launch文件使用XML文件描述,但是ROS 2的launch文件描述发生了很大的变化,是由python代码进行描述的。
但是仔细看下,还是会发现虽然描述不同,但是思路上差不多,LaunchDescription中描述要启动的节点和配置,Node相当于是
<node>标签,其中的package和node_executable分别代表功能包和其中要运行的节点执行文件名,arguments里边可以跟一些参数,类似于<args>标签。也可以参考以下官方介绍:
完整官方pdf介绍可以关注“古月居”微信公众号,后台回复“ros2launch”查看下载地址。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号