



















Turtlebot3自动驾驶入门教程-相机外标定
说明
- 介绍如何进行树莓派摄像头的外标定
操作步骤
- [Remote PC] 新终端,启动roscore
$ roscore
- [TurtleBot SBC] 新终端,启动摄像头
$ roslaunch turtlebot3_autorace_camera turtlebot3_autorace_camera_pi.launch
- [TurtleBot SBC] 新终端,启动action模式下的内标定
$ export AUTO_IN_CALIB=action
$ roslaunch turtlebot3_autorace_camera turtlebot3_autorace_intrinsic_camera_calibration.launch
- [Remote PC] 新终端,启动calibration模式下的外标定
$ export AUTO_EX_CALIB=calibration
$ roslaunch turtlebot3_autorace_camera turtlebot3_autorace_extrinsic_camera_calibration.launch
- [Remote PC] 新终端,打开rqt
$ rqt
左上角选择
plugins->visualization->Image view打开图像窗口打开第二天图像窗口,选择topic:
/camera/image_extrinsic_calib/compressed打开第三个图像窗口,选择topic:
/camera/image_projected_compensated[Remote PC] 新终端,打开参数配置
$ rosrun rqt_reconfigure rqt_reconfigure
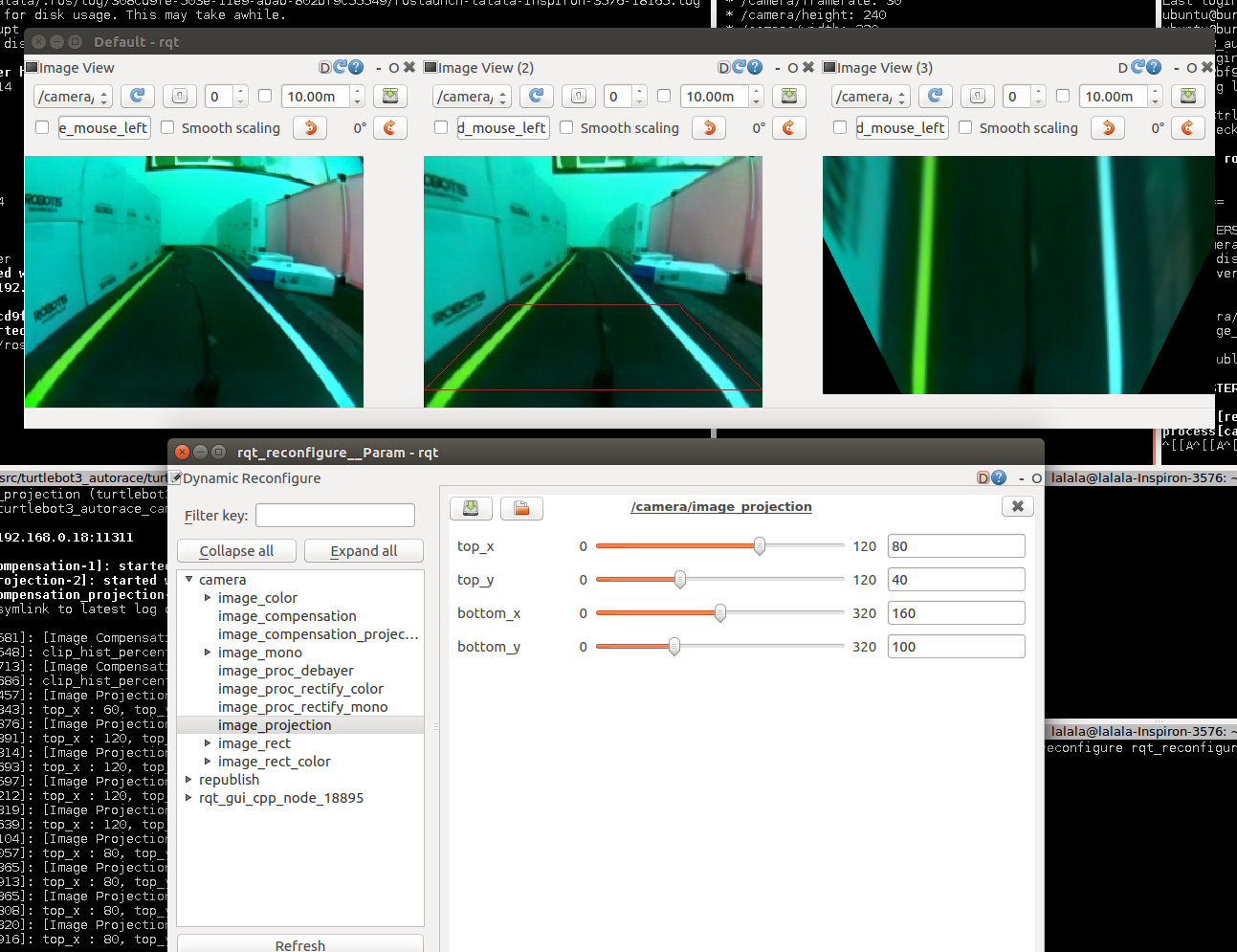
- 调整参数值
/camera/image_projection,/camera/image_compensation_projection - 调整
image_projection参数,会改变打开/camera/image_extrinsic_calib/compressed的图像窗口的红色方框的形状 - 相机外标定将转换由红色矩形包围的图像,并将显示从通道上看的图像
- 把相应的参数值写入到PC上的
turtlebot3_autorace_camera/calibration/extrinsic_calibration/文件里的projection.yaml文件 - 下一次启动即会使用新的参数值
- 若无法载入参数值,可以尝试修改PC上的
turtlebot3_autorace_camera/nodes/文件里的image_projection.py文件内的相关参数值 - 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号