



















Turtlebot3自动驾驶入门教程-图像校准
说明
- 介绍如何为树莓派鱼眼摄像头做图像校准
操作步骤
- [Remote PC] 新终端,启动roscore
$ roscore
- [TurtleBot SBC] 新终端,启动相机
$ roslaunch turtlebot3_autorace_camera turtlebot3_autorace_camera_pi.launch
- [Remote PC] 新终端,浏览图像界面
$ rqt_image_view
- 选择topic:
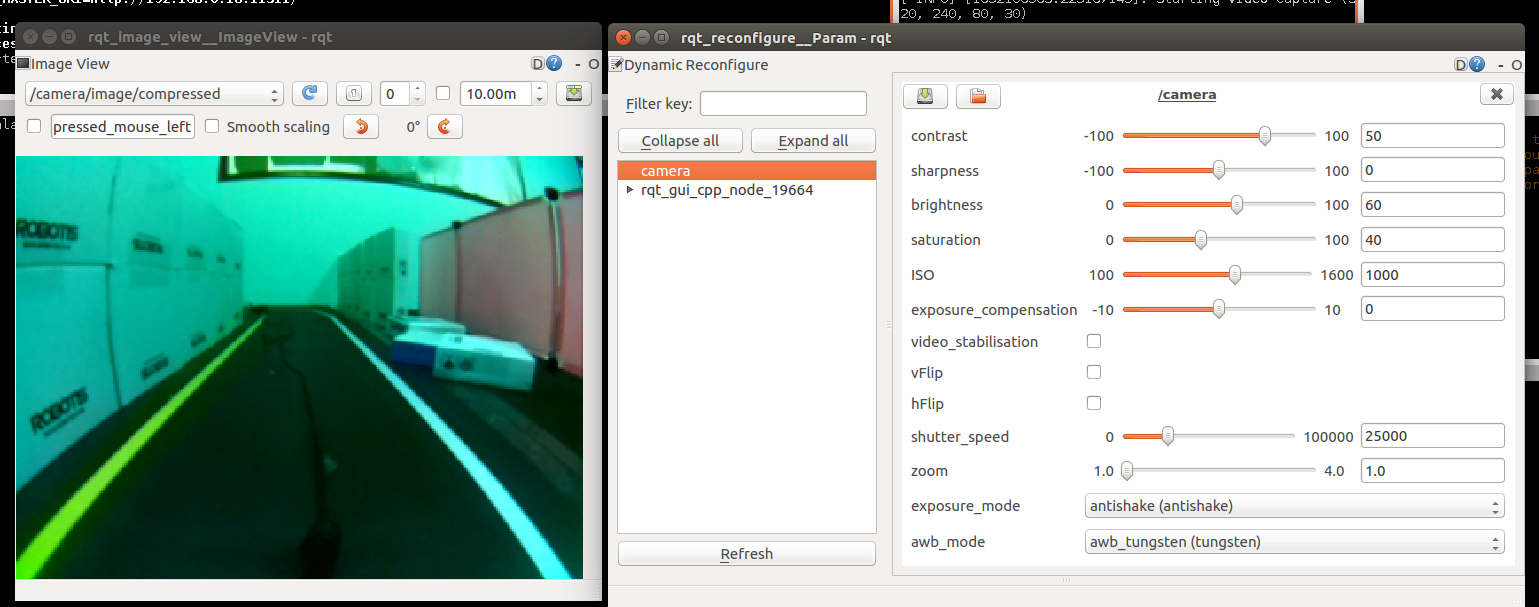
/camera/image/compressed或/camera/image/如果正常则可以看到图像 - [Remote PC] 新终端,打开配置界面
$ rosrun rqt_reconfigure rqt_reconfigure
选择
camera,调整参数值,使相机显示干净,足够明亮的图像。 之后,将每个值覆盖到树莓派上turtlebot3_autorace_camera/calibration/camera_calibration文件夹中camera.yaml里的参数值下次启动即会使用新的参数值,以达到更好的显示效果。
若不能正常载入参数,可以尝试修改树莓上的
raspicam_node/cfg文件夹中的Camera.cfg内的参数值效果图
注意:以上效果图仅供参考,请根据实际环境来设置参数
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号