



















Turbot3-Multi多机协同教程-多机定点导航
Turbot3-Multi多机协同教程-多机定点导航
说明:
- 介绍如何实现利用多机进行导航,相互之间可以避障
相关设备:
- Turbot3-Multi套件,采购地址
操作步骤:
- 关闭此前打开的ros程序,以免造成冲突
./multi_scripts/multi_kill.sh
- 新开终端,启动多机
// 根据你当前机器人的数量选择对应的命令
// 默认是启动三台机器人
./multi_scripts/multi_robot.sh
// 启动六台机器人
./multi_scripts/multi_robot6.sh
// 启动十台机器人
./multi_scripts/multi_robot10.sh
- 检查是否启动正常,能获取相应的话题
- 新开终端,输入rostopic list
- 效果如下:
ubuntu@T3MULTIC-V100:~$ rostopic list
/diagnostics
/rosout
/rosout_agg
/tb3_0/battery_state
/tb3_0/cmd_vel
/tb3_0/cmd_vel_rc100
/tb3_0/diagnostics
/tb3_0/firmware_version
/tb3_0/imu
/tb3_0/joint_states
/tb3_0/magnetic_field
/tb3_0/motor_power
/tb3_0/odom
/tb3_0/reset
/tb3_0/rpms
/tb3_0/scan
/tb3_0/sensor_state
/tb3_0/sound
/tb3_0/version_info
/tb3_1/battery_state
/tb3_1/cmd_vel
/tb3_1/cmd_vel_rc100
/tb3_1/diagnostics
/tb3_1/firmware_version
/tb3_1/imu
/tb3_1/joint_states
/tb3_1/magnetic_field
/tb3_1/motor_power
/tb3_1/odom
/tb3_1/reset
/tb3_1/rpms
/tb3_1/scan
/tb3_1/sensor_state
/tb3_1/sound
/tb3_1/version_info
/tb3_2/battery_state
/tb3_2/cmd_vel
/tb3_2/cmd_vel_rc100
/tb3_2/diagnostics
/tb3_2/firmware_version
/tb3_2/imu
/tb3_2/joint_states
/tb3_2/magnetic_field
/tb3_2/motor_power
/tb3_2/odom
/tb3_2/reset
/tb3_2/rpms
/tb3_2/scan
/tb3_2/sensor_state
/tb3_2/sound
/tb3_2/version_info
/tf
/tf_static
- 新开终端, 在查看一下tf
rosrun rqt_tf_tree rqt_tf_tree
- 效果如下:

- 新开终端,启动导航和rviz
- 默认使用的默认单机遥控建立的地图是single.yaml
// 根据你当前机器人的数量选择对应的命令
// 启动三台机器人导航程序
./multi_scripts/multi_nav_real.sh
// 启动六台机器人导航程序
./multi_scripts/multi_nav_real6.sh
// 启动十台机器人导航程序
./multi_scripts/multi_nav_real10.sh
- 效果如下:
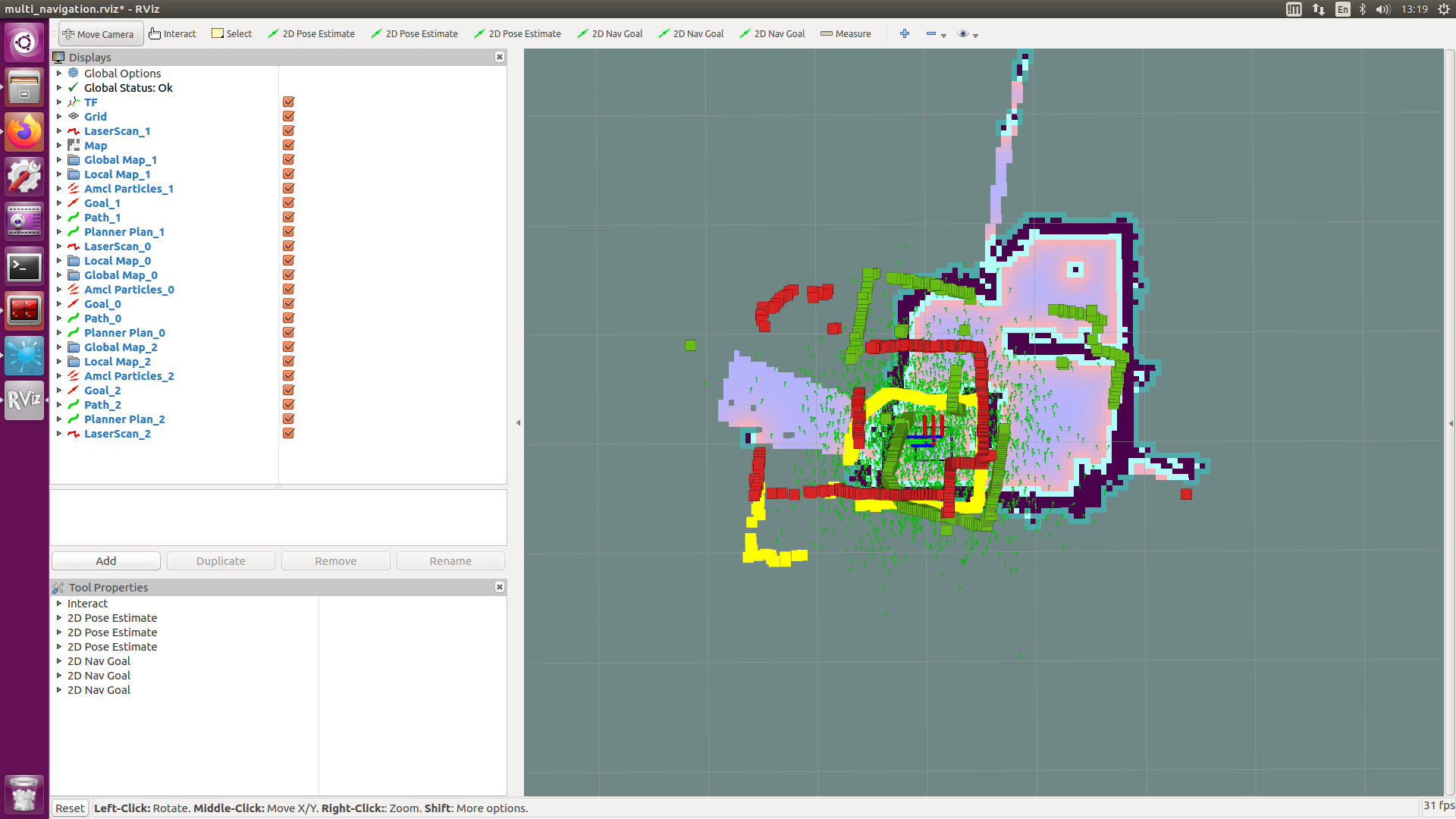
在rviz上为每台机器人初始化定位
rviz上的多个2D Pose Estimate对应的分别是client0,1,2三台的初始化
初始化位置之后如图:

- rviz上的多个2D Nav Goal对应的分别是client0,1,2三台的指定目标
- rviz上分别指定目标点,既可以实现导航
- 为第一台指定目标点后,自主导航
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号