



















ROS与激光雷达入门教程-思岚科技 Slamtec Mapper M1M1
说明
介绍如何Windows和Linux的PC端下使用SLAMTEC思岚科技的M1M1激光雷达
测试环境:win10 与 ubuntu 16.04
前提准备
首先需要解决M1M1的供电问题,M1M1供电需要满足
5V,1.6A这时可以使用一个可以提供5V,2A输出的充电宝来进行供电

Linux环境下
下载
Slamware ROS SDK (GCC 5.4)后,将其解压入一个空的工作目录,如:catkin_ws使用catkin工具初始化工作空间
$ cd ~/catkin_ws/src
$ catkin_init_workspace
- 编译且配置工作空间系统环境
$ cd ~/catkin_ws && catkin_make
$ source devel/setup.bash
将 SLAMTEC MAPPER 水平放置后,将开关
(SW1)拨动至ON启动设备,指示灯(D1)亮黄绿色,约 20 秒后雷达开始转动,此时设备正常启动当设备正常启动后,打开您的无线网络适配器,您将看到热点
SLAMWARE-XXXXXX您也可以使用有线网络连接SLAMTEC MAPPER至 PC,此时PC端网络适配器需设置成DHCP模式
连接上网络后,启动
slamware_ros_sdk节点
$ roslaunch slamware_ros_sdk slamware_ros_sdk_server_node.launch ip_address:=192.168.11.1
注:若此前设置到主从机,可能会出现ip错误,此时需要将
~/.bashrc的ip地址更新为动态获取的ip
- 查看发布的话题
$ rostopic list
/clicked_point
/cmd_vel
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/slamware_ros_sdk_server_node/add_line
/slamware_ros_sdk_server_node/add_lines
/slamware_ros_sdk_server_node/basic_sensors_info
/slamware_ros_sdk_server_node/basic_sensors_values
/slamware_ros_sdk_server_node/cancel_action
/slamware_ros_sdk_server_node/clear_lines
/slamware_ros_sdk_server_node/clear_map
/slamware_ros_sdk_server_node/global_plan_path
/slamware_ros_sdk_server_node/go_home
/slamware_ros_sdk_server_node/map
/slamware_ros_sdk_server_node/map_metadata
/slamware_ros_sdk_server_node/map_updates
/slamware_ros_sdk_server_node/move_by_direction
/slamware_ros_sdk_server_node/move_by_theta
/slamware_ros_sdk_server_node/move_line
/slamware_ros_sdk_server_node/move_lines
/slamware_ros_sdk_server_node/move_to
/slamware_ros_sdk_server_node/move_to_locations
/slamware_ros_sdk_server_node/odom
/slamware_ros_sdk_server_node/recover_localization
/slamware_ros_sdk_server_node/remove_line
/slamware_ros_sdk_server_node/robot_basic_state
/slamware_ros_sdk_server_node/robot_device_info
/slamware_ros_sdk_server_node/rotate
/slamware_ros_sdk_server_node/rotate_to
/slamware_ros_sdk_server_node/scan
/slamware_ros_sdk_server_node/set_map_localization
/slamware_ros_sdk_server_node/set_map_update
/slamware_ros_sdk_server_node/set_pose
/slamware_ros_sdk_server_node/sync_map
/slamware_ros_sdk_server_node/virtual_tracks
/slamware_ros_sdk_server_node/virtual_walls
/tf
/tf_static
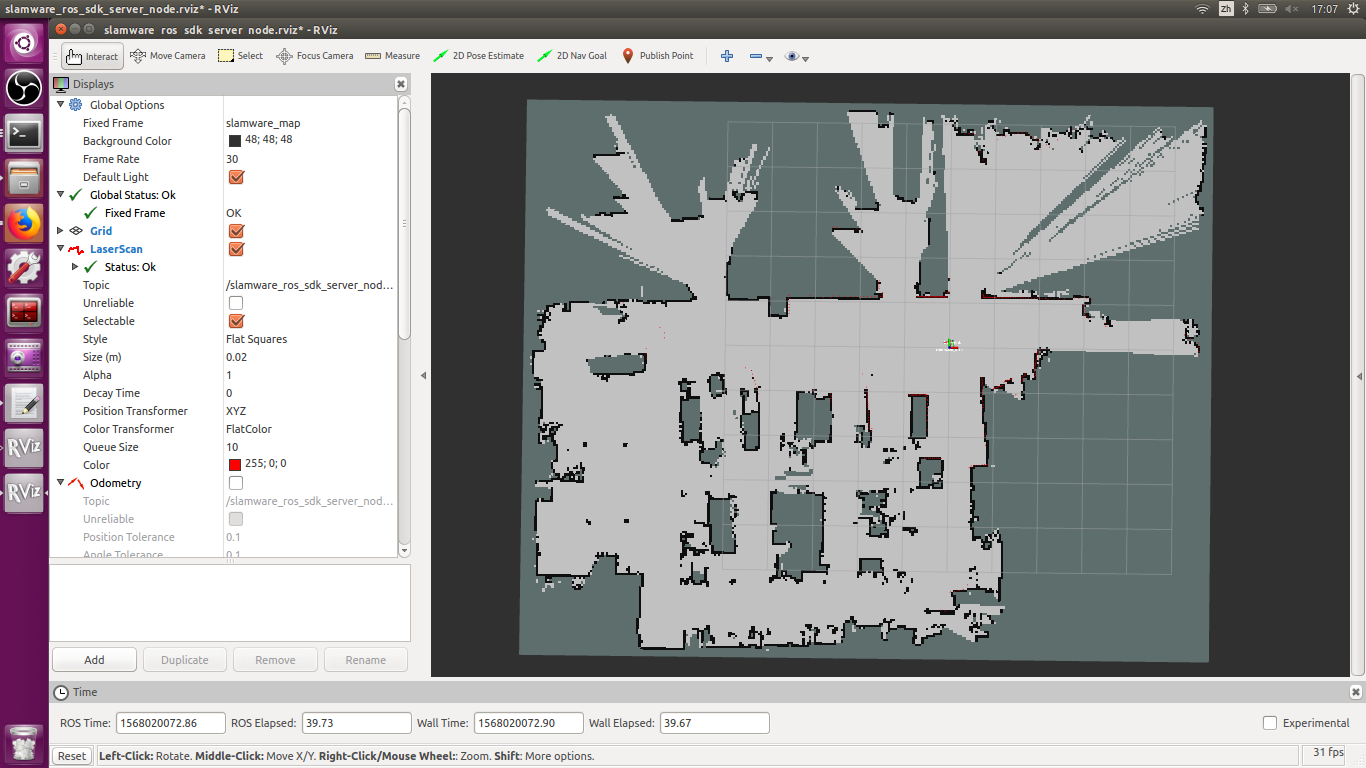
- 启动Rviz查看地图
$ roslaunch slamware_ros_sdk view_slamware_ros_sdk_server_node.launch
移动SLAMTEC MAPPER进行建图
保存地图到本地根目录
$ rosrun map_server map_saver map:=/slamware_ros_sdk_server_node/map -f ~/map
Windows环境下
下载和安装 Slamtec RoboStudio
然后将 SLAMTEC MAPPER 水平放置后,将开关
(SW1)拨动至ON启动设备,指示灯(D1)亮黄绿色,约 20 秒后雷达开始转动,此时设备正常启动当设备正常启动后,打开您的无线网络适配器,您将看到热点
SLAMWARE-XXXXXX您也可以使用有线网络连接SLAMTEC MAPPER至 PC,此时PC端网络适配器需设置成DHCP模式

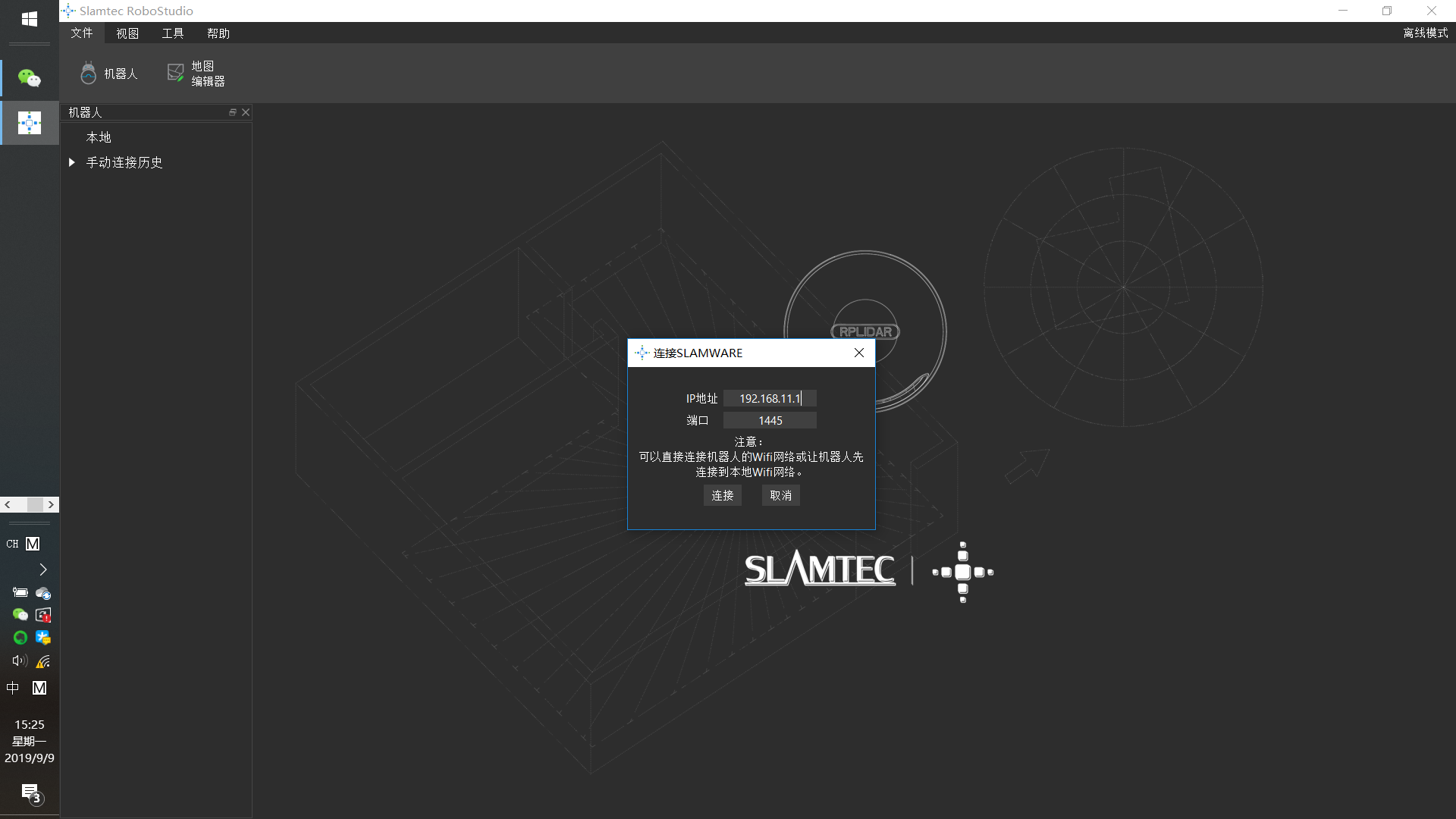
当连接上SLAMTEC MAPPER后,打开
Slamtec RoboStudio,在弹出来的窗口上点击忽略,用离线模式登陆进入到主界面菜单栏上的机器人页面,右击左侧边栏,输入ip
192.168.11.1,端口为1445
- 连接成功之后,程序界面将出现MAPPER扫描到的地图
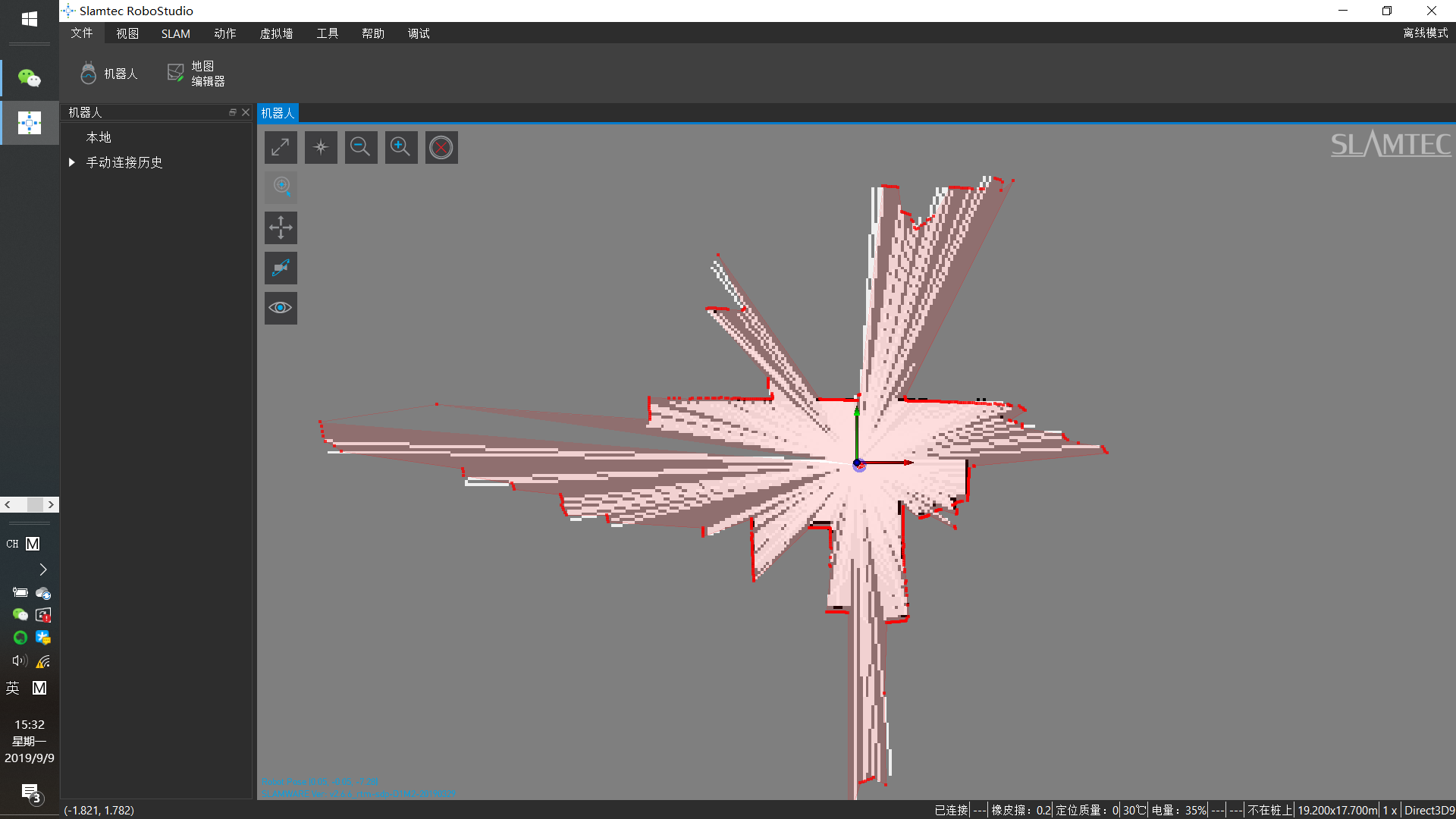
- 更多
Slamtec RoboStudio相关内容请查阅Slamtec RoboStudio相关文档
参考资料
演示视频
- 手持雷达在楼道内测试
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号