



















PX4用户指南-飞行-基本操作
PX4用户指南-飞行-基本操作
说明:
- 介绍如何在手动或自动驾驶辅助飞行模式下使用RC变送器飞行车辆的基本知识(自主飞行参见:任务)
飞行控制/命令:
- 所有飞行,包括起飞和着陆,都是使用4种基本命令控制的:侧倾,偏航,俯仰和油门。
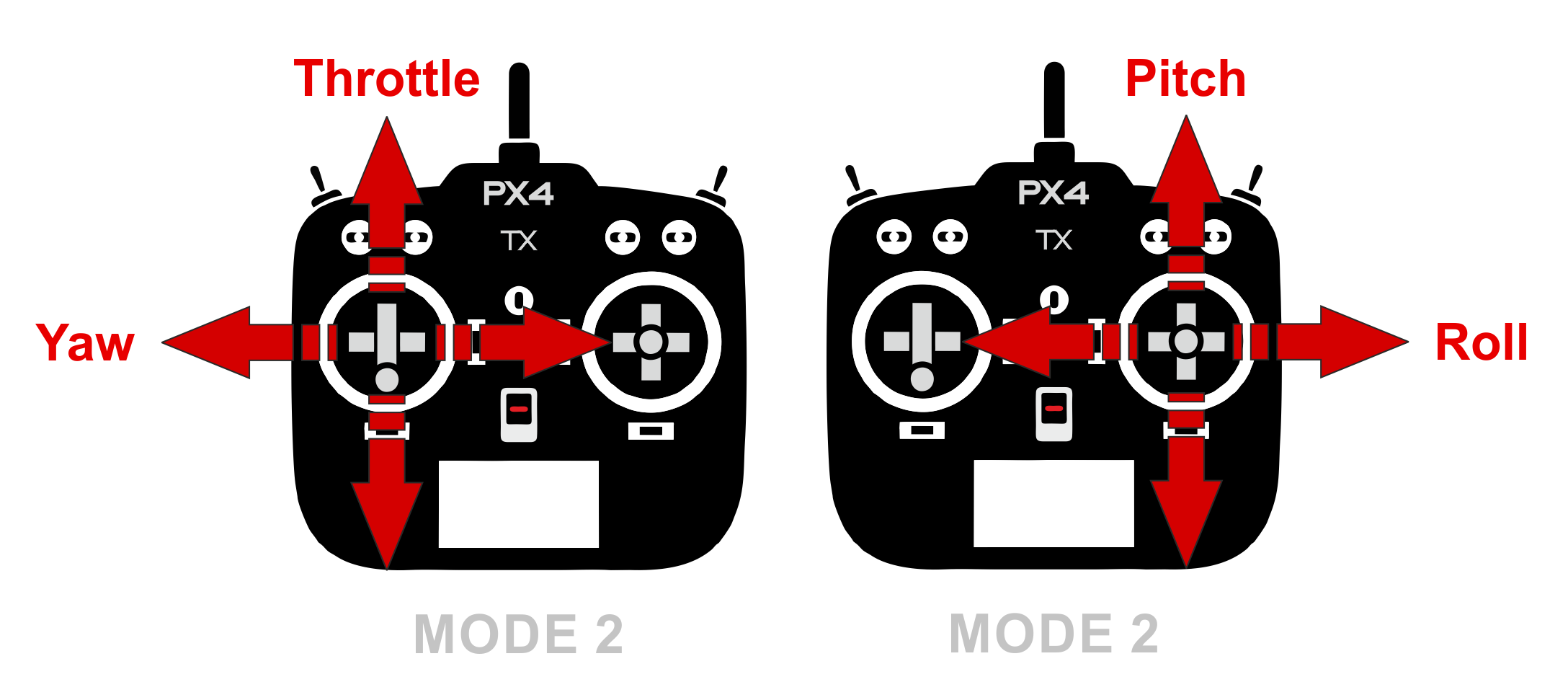
- 为了控制您的飞机,您需要了解基本的Roll,Pitch,Yaw和Throttle命令如何影响3D空间中的移动。
- 这取决于你是在控制像飞机这样的前飞飞机,还是像多旋翼飞行器这样的“悬停飞机”。
悬停飞机:
悬停飞机(Copter,VTOL处于悬停模式)响应移动命令,如下所示:
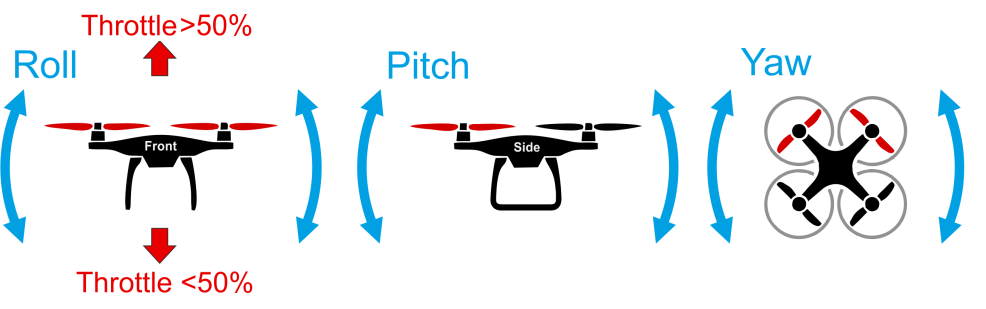
Pitch =>前进/后退。
- Roll =>左/右。
- Yaw =>左右旋转围绕框架的中心。
- Throttle =>改变高度/速度。
前飞飞机
前飞飞机(飞机,前飞中的垂直起降)响应运动命令,如下所示:
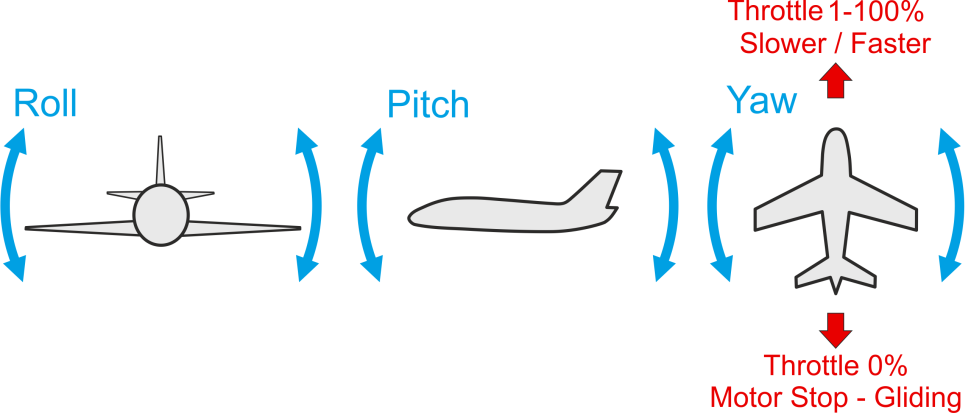
Pitch=>上/下。
Roll =>左/右转弯。
Yaw =>左/右尾旋转并转弯。
Throttle =>改变了前进速度。
飞机的最佳转弯称为协调转弯,同时使用侧倾和小偏航进行。 这种策略需要经验!
辅助飞行
即使了解车辆如何控制,完全手动模式下的飞行也是非常不可原谅的。
新用户应将其发射器配置为使用飞行模式,其中自动驾驶仪自动补偿不稳定的用户输入或环境因素。
强烈建议新用户使用以下三种模式:
Stabilized 稳定 - 车辆难以翻转,如果摇杆被释放(但不是保持位置)将会平稳
Altitude海拔高度 - 攀爬和下降被控制为具有最大速率。
Position位置 - 当释放摇杆时,车辆将停止(并保持位置抵抗风漂移)
起飞和着陆
最简单的起飞方式是使用自动起飞模式(记住你需要在车辆电机接合之前对车辆进行解锁)。
要自动再次着陆,您可以使用Land或Return模式。
对于多旋翼飞行器(以及多旋翼飞行器中的VTOL),飞行员可以:
- 通过启用位置模式手动起飞,解锁车辆,然后将油门杆提升到62.5%以上。
- 高于此值,所有控制器都启用,车辆进入悬停所需的油门水平(MPC_THR_HOVER)。
- 通过向下按油门杆手动降落直到车辆着陆和锁定(或设置COM_DISARM_LAND> 0以在着陆时自动锁定)。
如果您在着陆期间看到车辆“抽搐”(关闭电机,然后立即将它们向上翻转)
这可能是由于着陆探测器配置不佳(特别是MPC_THR_HOVER设置不当)造成的。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号