



















PX4用户指南-机身构建-垂直起降-vtol_tailsitter_caipiroshka_pixracer
PX4用户指南-机身构建-垂直起降-vtol_tailsitter_caipiroshka_pixracer
说明:
- 介绍如何组装TBS Caipiroshka
Caipiroshka VTOL
- Caipiroshka VTOL是一种略微改良的TBS Caipirinha。
- 视频:https://youtu.be/acG0aTuf3f8
硬件列表:
- TBS Caipirinha Wing (Eflight store)
- Left and right 3D-printed motor mount (design files)
- CW 8045 propeller (Eflight store)
- CCW 8045 propeller (Eflight store)
- 2x 1800 kV 120-180W motors
- Quanum MT2208 1800 kV
- ePower 2208
- 2x 20-30S ESC
- Eflight store
- BEC (3A, 5-5.3V) (only needed if you are using ESCs which cannot act as a 5V power supply for the output rail)
- 3S 2200 mA LiPo battery
- Team Orion 3S 11.1V 50 C (Hobbyshop store)
- Pixracer autopilot board + power module
- Digital airspeed sensor
组装
- 下图显示了一个完全组装的Caipiroshka如何看起来的例子。

- 在下文中,将给出关于如何构建车辆的一些一般提示。
驾驶仪:
- 将自动驾驶仪安装在靠近机身CG的中间位置。
电机:
- 打印在零件清单中指定了STL文件链接的电机支架(2次)。
- 在每个机翼侧安装一个电机支架,使电机轴大致穿过电梯中心(见图)。
- 在上图中,两个电机安装座之间的水平距离为56厘米。
- 一旦在机翼上标记了正确的位置,就可以在机翼的上下两侧覆盖与底座接触的区域,标准透明胶带。
- 然后在该区域涂上一层热胶,并将电机支架粘在机翼上。
- 在机翼表面和热胶之间安装胶带的原因是,您可以通过从机翼上撕下胶带而不会造成任何损坏,轻松地拆下电机支架。
- 这在尝试更换损坏的电机座时非常有用。
电调:
- 电机控制器可以使用胶水或电缆扎带直接安装在电机安装座的平面上。
- 您必须将电源线连接到电池托架。 您可以使用旧的烙铁将通道熔化到泡沫中。
- 连接电池托架中两个电机控制器的电源线,并将插头焊接到末端。
- 这样您就可以将电机控制器连接到电源模块。
- 如果您没有可以为自动驾驶仪的输出轨提供5V的电机控制器,那么您将不得不使用外部电源(BEC)。
GPS:
- GPS可以安装在机身最后面的中间位置。
- 这有助于将飞机的重量转移到后面,因为两个电机,一个摄像头和一个可能更大的电池可以使它非常沉重。
- 此外,与12V电源线的较大距离有利于减少外部磁力计的磁干扰。
空速传感器:
- 将皮托管附近靠近其中一个翼侧的外边缘。
- 确保皮托管不受螺旋桨气流的影响。
- 如果从管到电机轴的水平距离大于螺旋桨的半径,则应该没问题。
- 使用例如 一个旧的烙铁为皮托管,油管和实际传感器创建一个凹槽(见图)。
- 创建一个通道,用于将电缆穿过机翼到其他组件。
传感器连接i2C总线
- 空速传感器和外部磁力计(位于gps外壳中)都需要连接到自动驾驶仪的I2C总线。
- 因此,您必须使用类似于部件列表中指示的I2C分离器。
- 将分离器板与自动驾驶仪的I2C总线连接。
- 然后使用标准I2C电缆将外部磁力计和空速传感器连接到分离器板。
- 在上图中,分离器板位于GPS单元的左侧。
升降副翼:
- 可以使用透明胶带将升降机连接到机翼的后侧。
- 您可以按照Team Blacksheep在TBS Caiprinha机身的构建手册中提供的说明进行操作。
组装规则:
- 在将所有组件安装到机翼之前,使用胶带将它们保持在大致位置
- 并检查机翼的CG是否在TBS Caipirinha的构建手册中指定的建议范围内。
- 根据您希望装载的其他组件(例如前面的GoPro或更大的电池),您需要移动组件的位置。
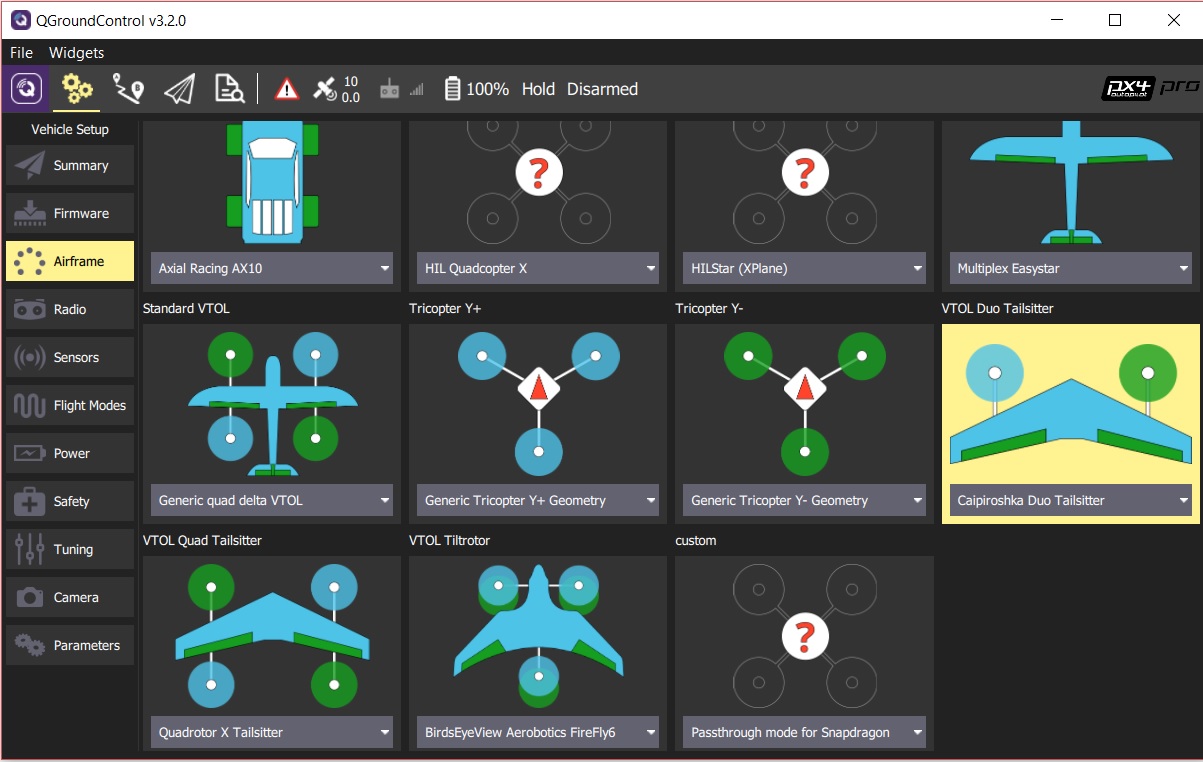
固件配置:
- 切换到QGroundControl中的配置部分,然后选择机身选项卡。
- 向下滚动列表以查找VTOL Duo Tailsitter图标。
- 从下拉列表中选择Caipiroshka Duo Tailsitter。
伺服连接:
- 下表中的描述指的是当车辆平放在桌子上的腹部时面向车辆前部的用户。
| Output | Rate | Actuator |
|---|---|---|
| MAIN1 | 400 Hz | Right (starboard) motor controller |
| MAIN2 | 400 Hz | Left (port) motor controller |
| MAIN3 | 400 Hz | Empty |
| MAIN4 | 400 Hz | Empty |
| MAIN5 | 50 Hz | Right (starboard) aileron servo |
| MAIN6 | 50 Hz | Left (port) aileron servo |
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号