



















PX4用户指南-机身构建-垂直起降-vtol_tiltrotor_eflite_convergence_pixfalcon
PX4用户指南-机身构建-垂直起降-vtol_tiltrotor_eflite_convergence_pixfalcon
说明:
- 介绍如何组装E-Flite Convergence
E-Flite Convergence
- E-Flite Convergence可以通过PX4轻松转换为完全自主的VTOL。
- 没有太多空间,但对于拥有GPS和遥测功能的Pixfalcon来说已经足够了。
- 视频:https://youtu.be/E61P2f2WPNU
硬件组装:
- 需要7个PWM信号,并以下列方式连接到Pixfalcon(匹配PX4中的机身配置,从平面后面看左/右):
| Port | Connection |
|---|---|
| MAIN 1 | Motor right |
| MAIN 2 | Motor left |
| MAIN 3 | Motor back |
| MAIN 4 | empty |
| MAIN 5 | Tilt servo right |
| MAIN 6 | Tilt servo left |
| MAIN 7 | Elevon right |
| MAIN 8 | Elevon left |
Pixfalcon可以安装在原始自动驾驶仪所在的位置。
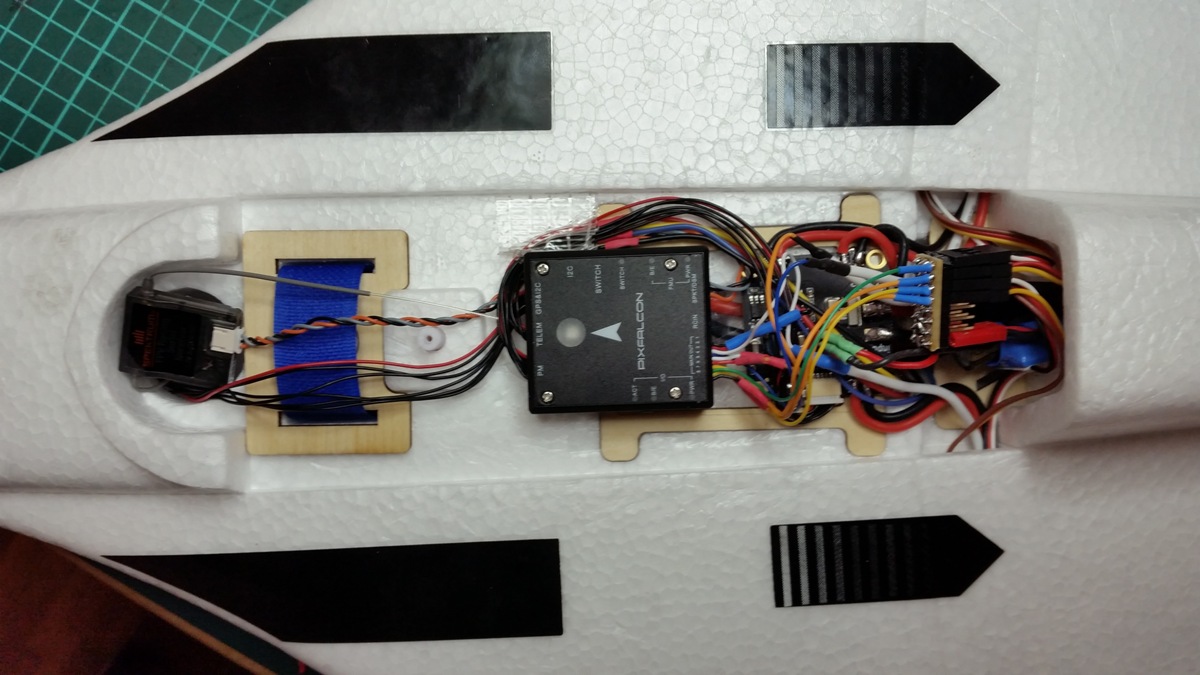
遥测模块安装在用于固定FPV传动装置的托架中。
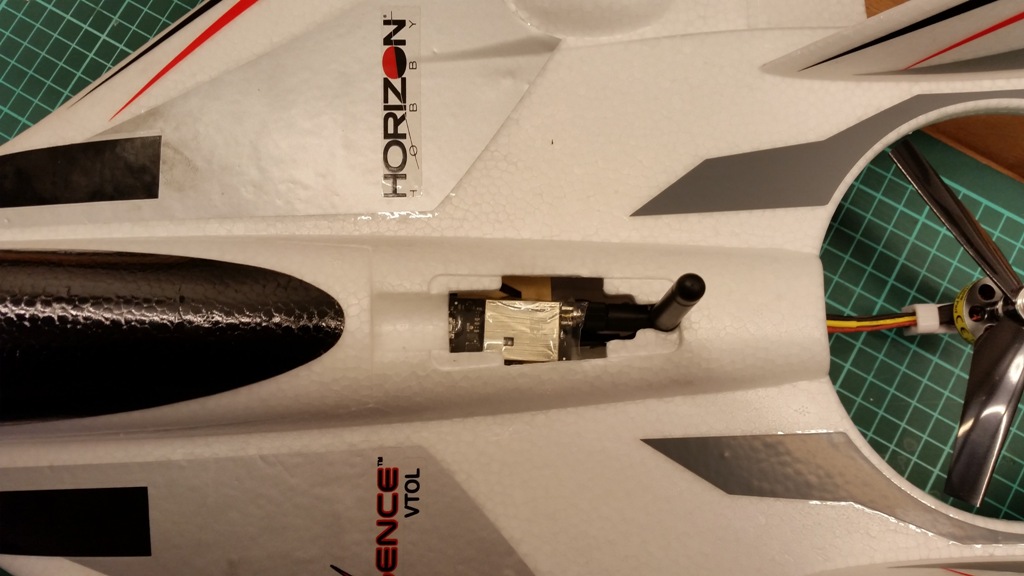
对于GPS,我们在“驾驶舱”内切出一段泡沫。
通过这种方式,可以将GPS放入体内,并且可以很好地存放,而不会损害外观:)。

配置:
在正常配置自动驾驶仪(无线电,传感器,飞行模式)之前,在QGC的“VTOL Tiltrotor”下选择机身配置“E-flite Convergence”并重新启动。
如果在QGC中尚未显示机身,请设置以下参数并重新启动:
- SYS_AUTOSTART: 13012
- SYS_AUTOCONFIG: 1
注意:
- 请记住分配转换开关以切换到固定翼。
- 默认情况下,启用永久稳定。
- 如果您想在固定翼中完全手动飞行,请将VT_FW_PERM_STAB设置为0。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号