



















PX4用户指南-机身构建-多旋翼 -lumenier_qav250_pixhawk_mini
PX4用户指南-机身构建-多旋翼 -lumenier_qav250_pixhawk_mini
说明:
- 介绍使用Pixhawk Mini飞行控制器的框架的完整构建和配置说明
FPV四轴飞行器
- Lumenier QAV250迷你FPV四轴飞行器是一款小巧但功能齐全的FPV多旋翼飞行器架。
- 本文提供了使用Pixhawk Mini飞行控制器的框架的完整构建和配置说明
- 包括如何使用QGroundControl安装和配置PX4自动驾驶仪。
关键信息
- 框架:Lumenier QAV250 CF.
- 飞行控制器:Pixhawk Mini
- 装配时间(约):3.5小时(2小时框架组装, 1.5小时 自动驾驶安装 )
图片:

材料清单
- 下面列出了此构建中使用的组件(以及可以购买它们的位置的链接)。
- 通常,我们使用制造商推荐的飞行控制器和框架的硬件。
- 列表:
飞行控制器:Pixhawk Mini(已停产)
电源模块:3DR 10s电源模块(已停产)
ESC:Lumenier f390与Blheli(getfpv.com)。 这些都带有电机。
Motors:Lumenier RX2204 -14 2300KV(getfpv.com)
螺旋桨:Lumenier 5x4.5 2刀片(getfpv.com)
框架:Lumenier QAV250 - CF(getfpv.com)
接收器:FR SKY D4R-II(getfpv.com)
电池:Lumenier 4S 1300 mAh(getfpv.com)
- 注意:
- Pixhawk Mini附带的4S电源模块可用于上述电池尺寸(而不是10S电源模块)。 装配与任一电源模块相同。
- 我们还推荐这些ESC:Lumenier 12 amp ESC带SimonK AutoShot(2-4s N-FET)(getfpv.com)。
硬件
- 本节列出了框架和自动驾驶仪安装的所有硬件。
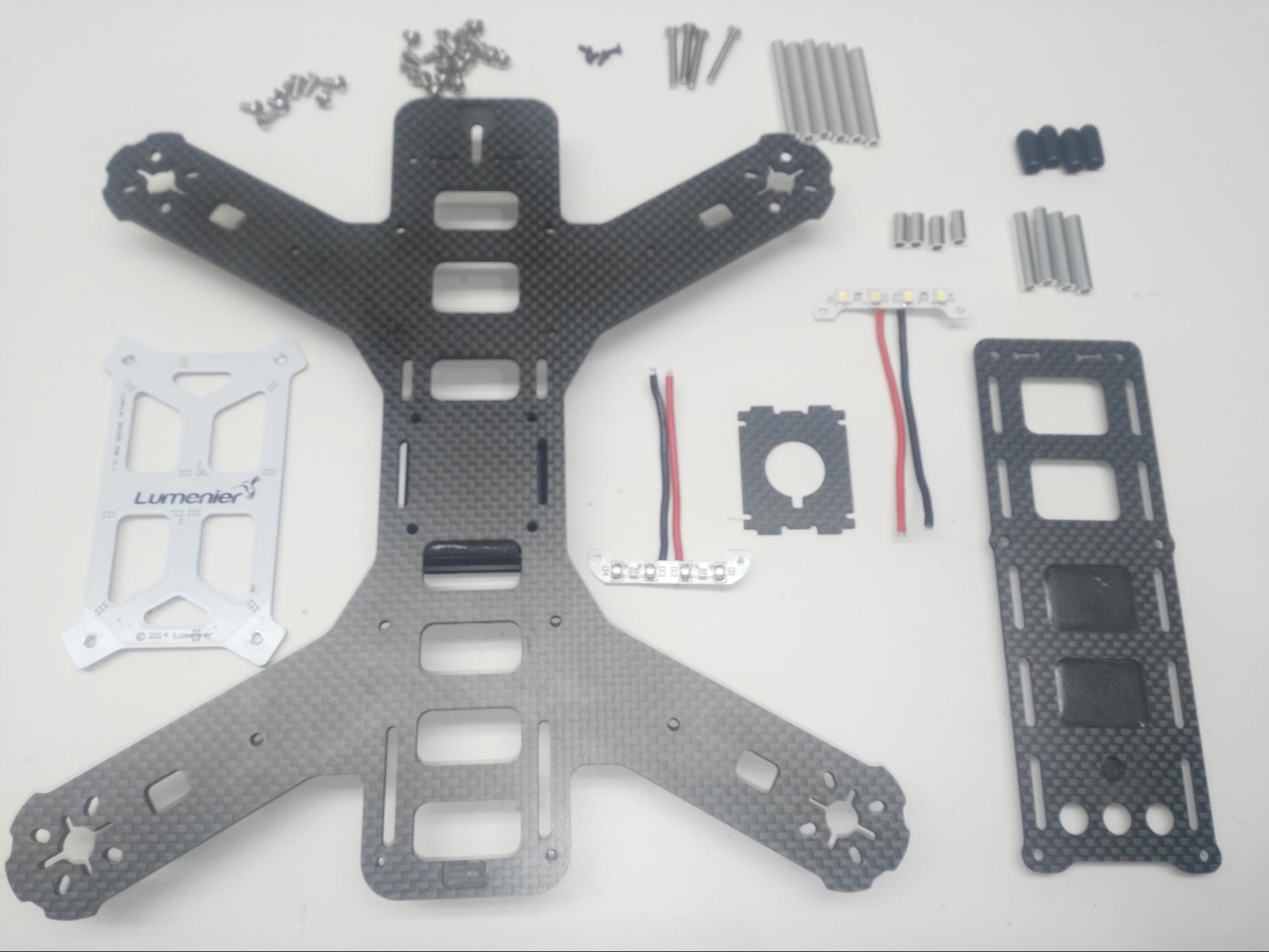
- Frame QAV250
| Description | Quantity |
|---|---|
| Unibody frame plate | 1 |
| Flight controller cover plate | 1 |
| PDB | 1 |
| Camera plate | 1 |
| 35mm standoffs | 6 |
| 25mm standoffs | 4 |
| 10mm standoffs | 4 |
| Vinyl caps | 4 |
| 20mm steel screws | 4 |
| 18mm steel screws | 10 |
| Velcro battery strap | 1 |
| Foam for battery | 1 |
| LEDs strip | 2 |
- 图示:
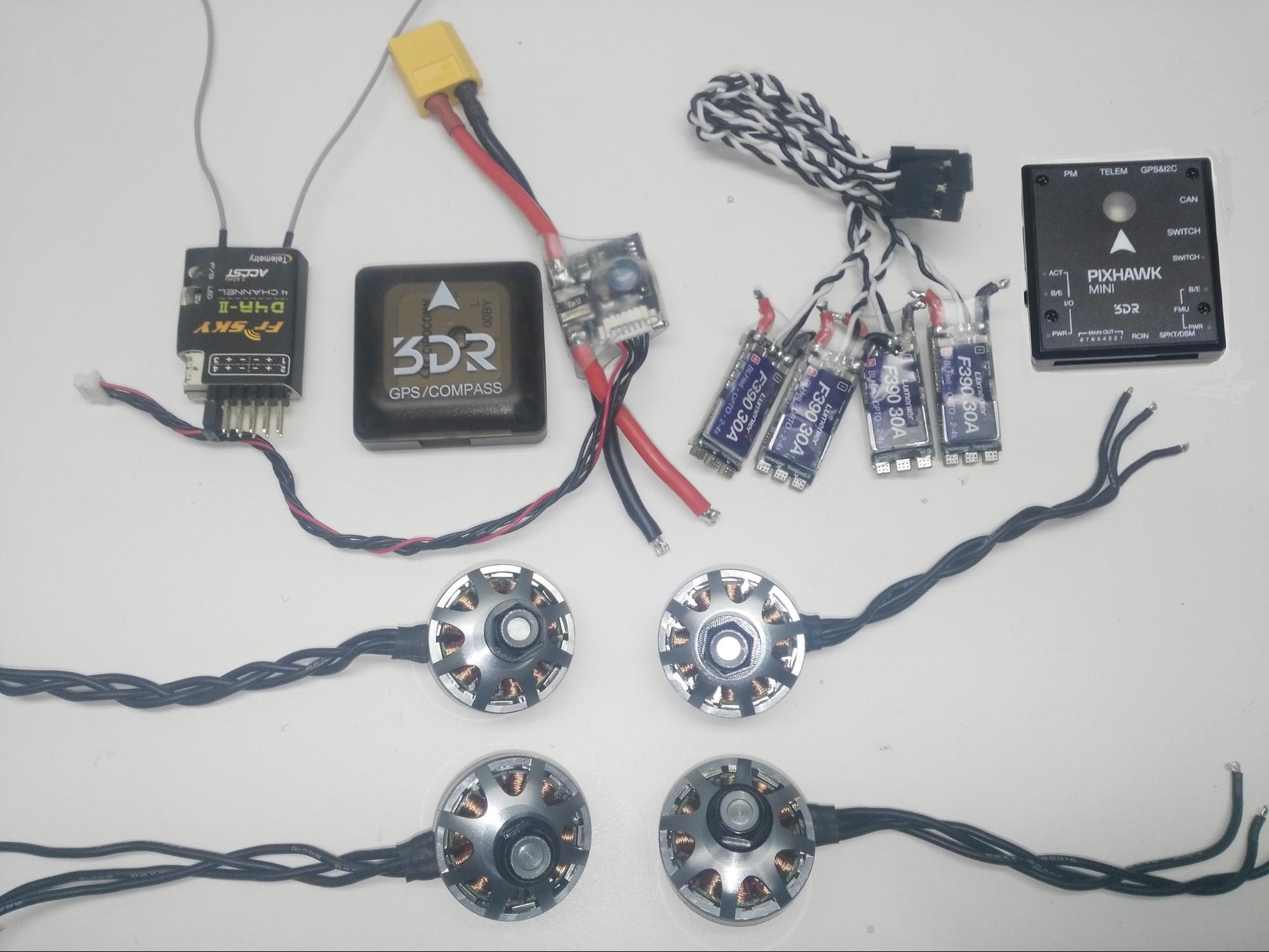
电子部分
- 列表
| Description | Quantity |
|---|---|
| Motors lumenier Rx2204-14 2300KV | 4 |
| ESC lumenier 30A | 4 |
| 3DR power module 10S | 1 |
| Fr-sky D4R-II receiver | 1 |
| 3DR Pixhawk Mini autopilot | 1 |
| 3DR GPS Neo-M8N | 1 |
| 8 PWM servo output | 1 |
| External safety switch | 1 |
| Micro SD card | 1 |
| Battery Lumenier 1300 mAh 4S 14.8V | 1 |
- 图片
遥测(可选)
遥测无线电是可选组件,可用于将地面控制站(GCS)计算机与自动驾驶仪无线连接。
这使您可以查看飞行中的数据,即时更改任务,并在飞行期间调整车辆。
PX4 / Pixhawk Mini支持许多不同的遥测无线电。
此版本中使用的无线电是(强烈推荐)3DR遥测无线电(915MHz)(已停产)。
遥测无线电使用不同的频段以符合当地法规。
选择适合您所在地区的版本:美国 - 915 MHz,欧洲/澳大利亚 - 433MHz
遥测套件包括:
- 两个遥测收发器(用于车辆和GCS)
-Micro USB线
-Android OTG转接线
-双面胶带
- 两个遥测收发器(用于车辆和GCS)
图片

装配工具
此程序集中使用以下工具:
2.0毫米六角螺丝刀
3毫米飞利浦螺丝刀
剪线钳
烙铁和焊料
精密镊子
图片

离架组装
- 本节介绍如何连接电子设备(离架)以及如何在没有电子设备的情况下组装框架。
- 如果框架截图不够清晰,则可以使用此信息作为参考。
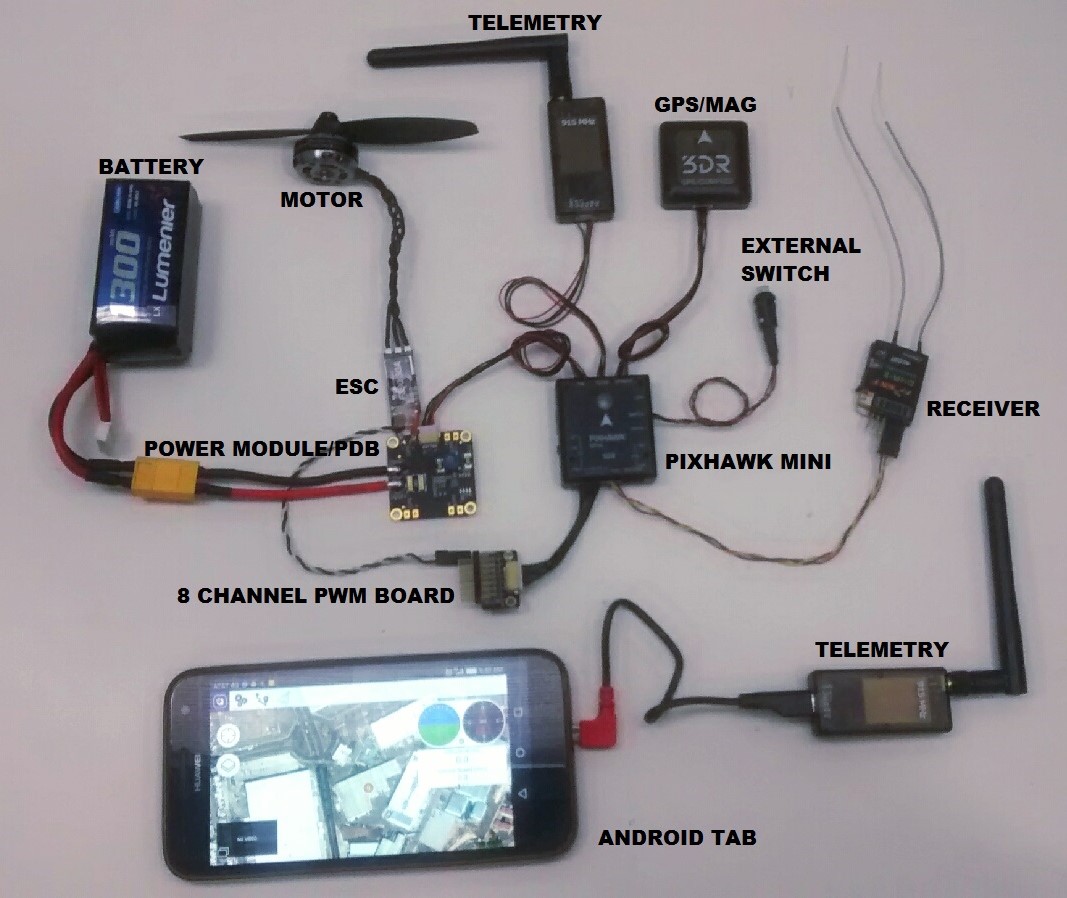
电子线路/连接(离架)
- 下图显示了Pixhawk Mini的标准多旋翼接线。
- 它使用四路配电板为ESC,Pixhawk和Pixhawk电源轨供电(该板包含一个集成电源模块,可支持高达4S的电池)。
- 对于这个QAV250版本,我们使用单独的10S电源模块为ESC和Pixhawk供电,我们不使用可选的外部开关。 接线类似!
- 例图
仅框架装配
- 本节介绍如何在没有电子设备复杂的情况下组装框架。
- 它是下面的完整装配文档中的参考。
- 组装框架:
- 步骤1:如图所示,使用10mm支架和20mm钢螺钉用于PDB。

- 步骤2:将框架放在支架上。

- 确保以正确的方式安装框架板。 下面显示的这个切口显示了框架的底部。

- 步骤3:将35毫米支架放在螺丝上(你需要2.0毫米六角螺丝刀)。

- 步骤4:安装摄像机板并添加剩余的支架。
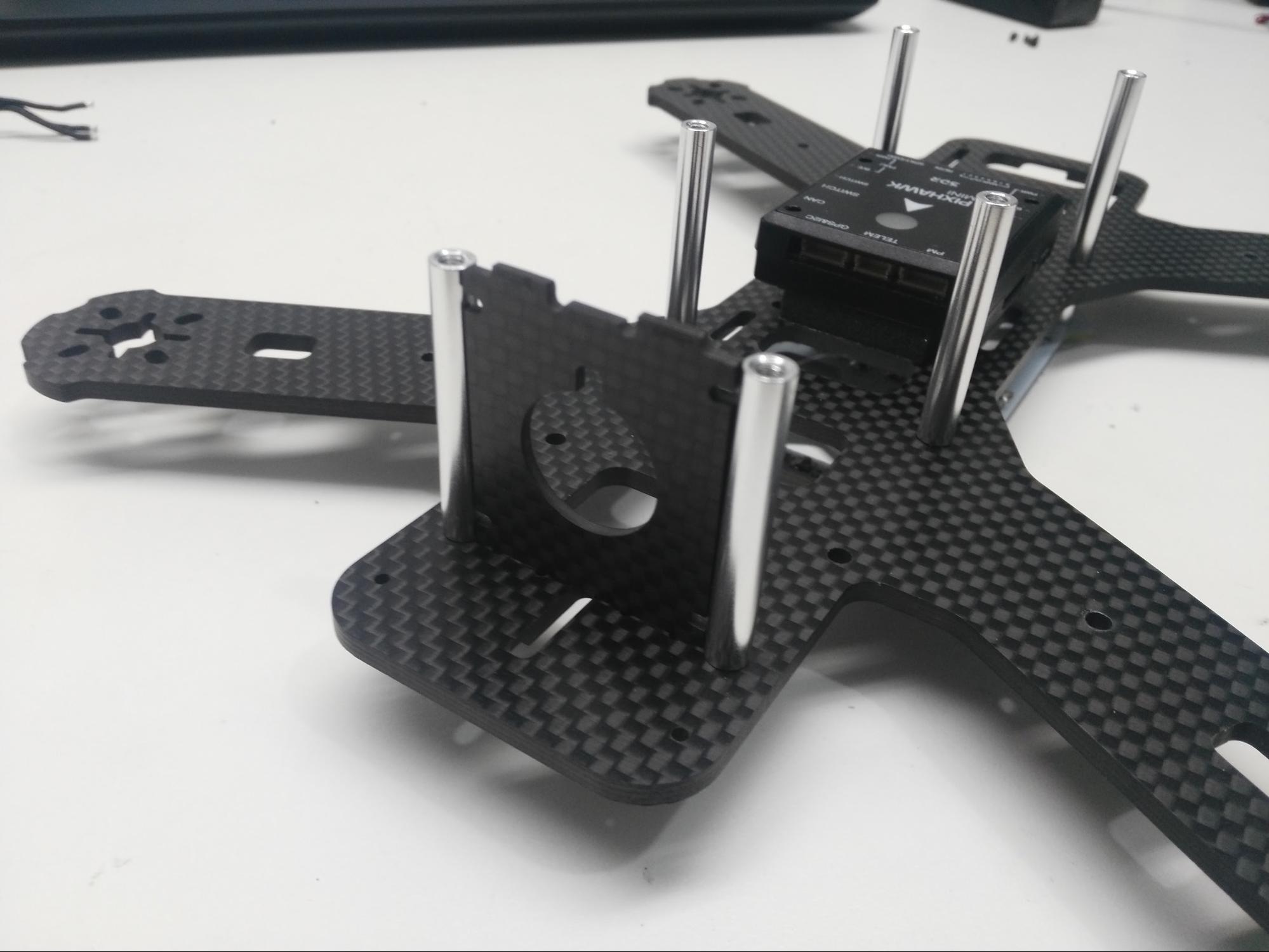
- 步骤5:将飞行控制器盖板放在支架上并拧紧到位。

- 其他/制造商组装可在此处找到:Lumenier QAV250碳纤维构建手册。
全电子组装
- 本节介绍QAV250与Pixhawk Mini,电机和其他电子产品的完整组装。
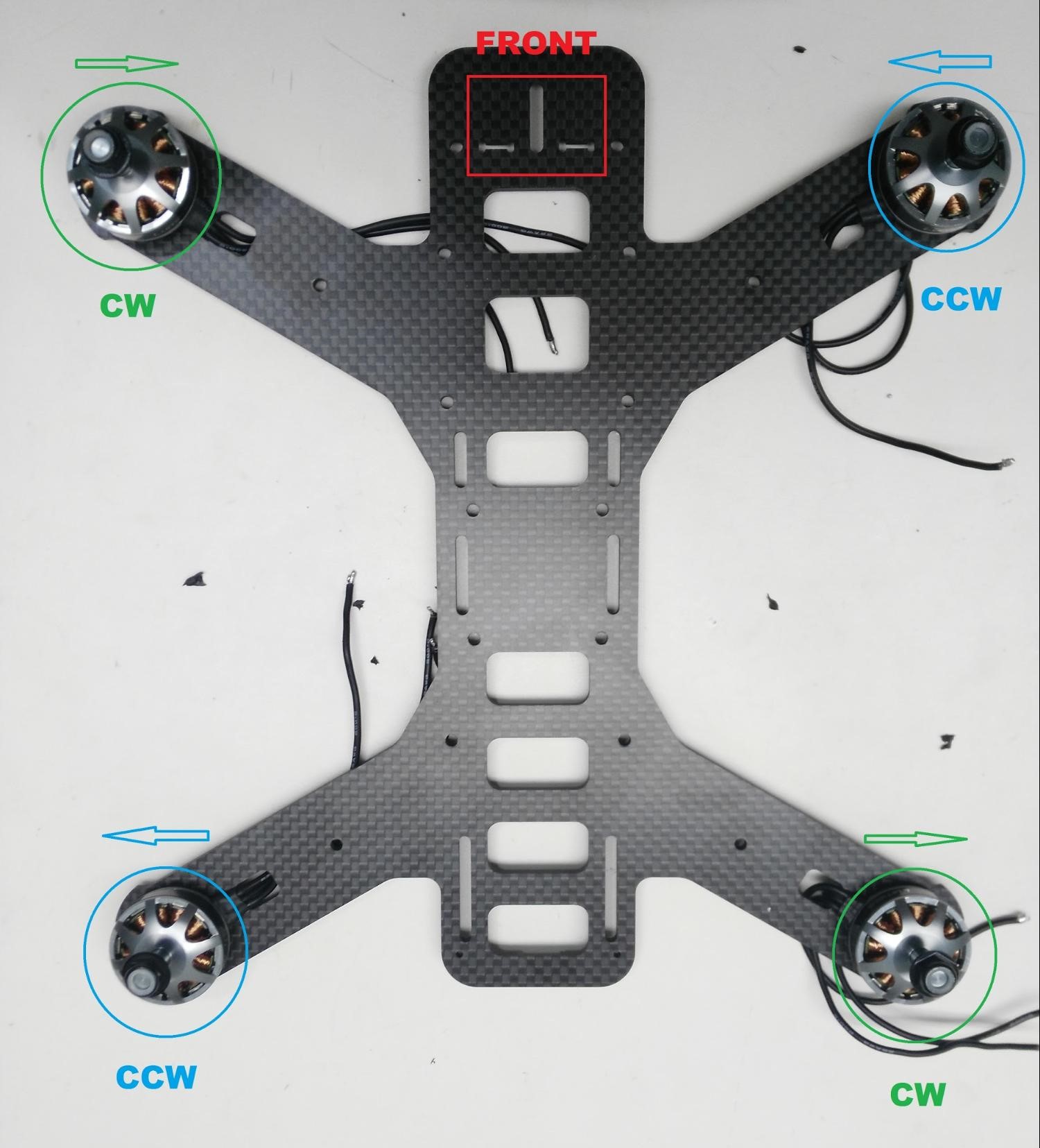
- 第1步:安装电机
- 红色标记表示框架的正面。 确保将电机按正确顺序放在框架上,并将电缆穿过框架底部。
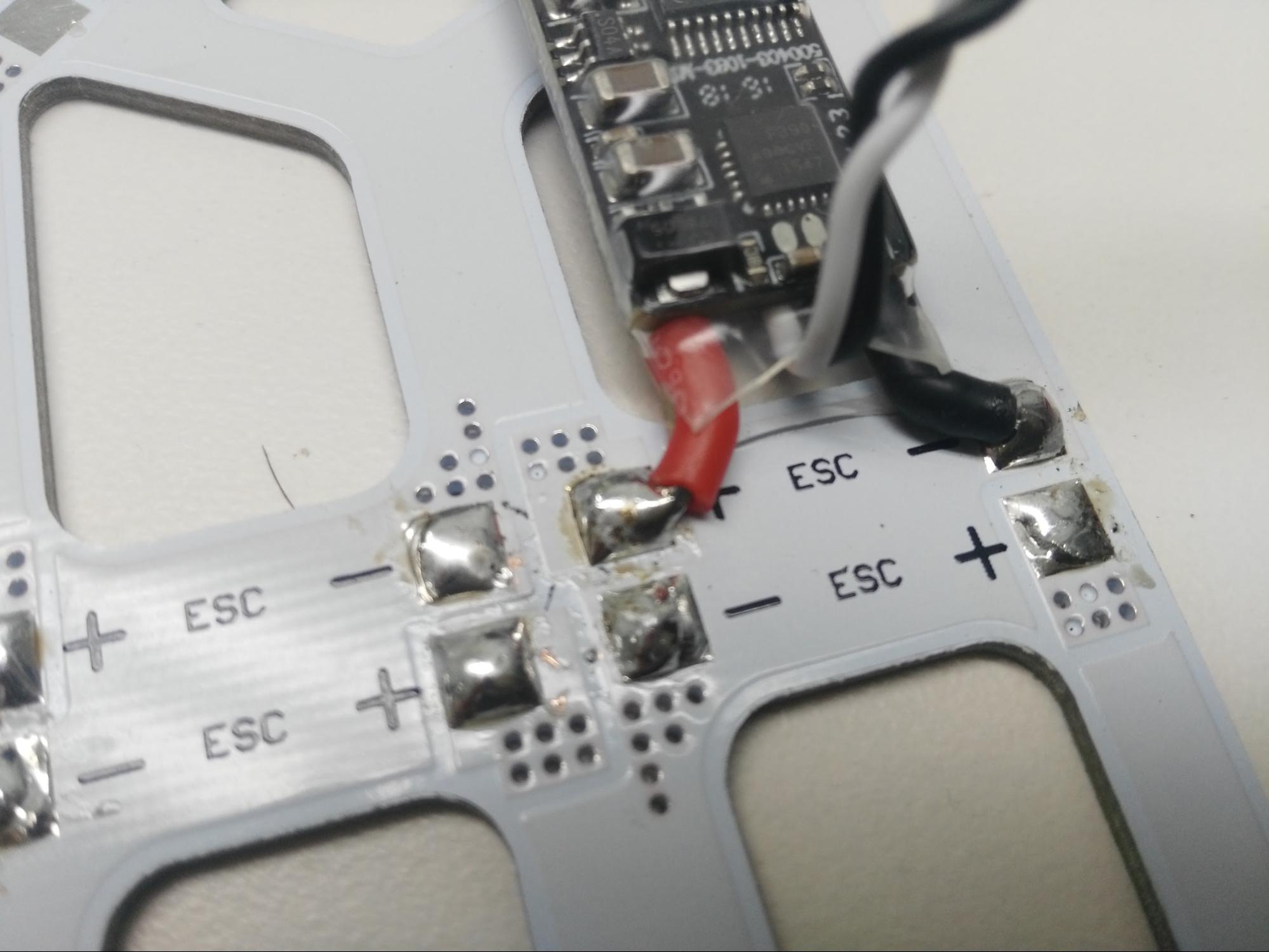
步骤2:将4个ESC焊接到PDB
红色电缆必须焊接到正极焊盘,黑色电缆焊接到负极焊盘(如下面的单个ESC所示)。
步骤3:将电源模块焊接到PDB
红色电缆应焊接到正极焊盘,黑色电缆焊接到负极焊盘。 焊接的方式适合您的构建。
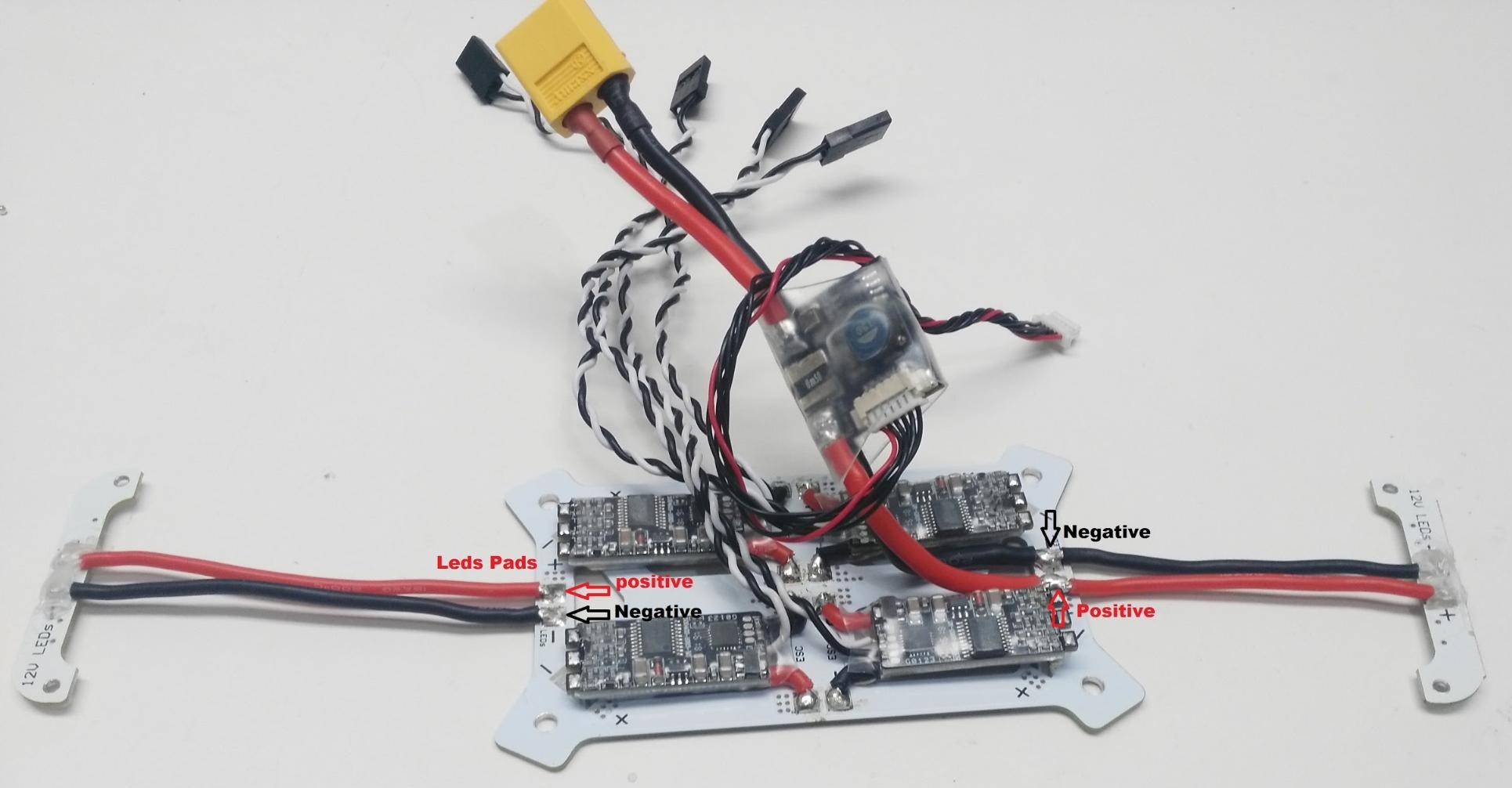
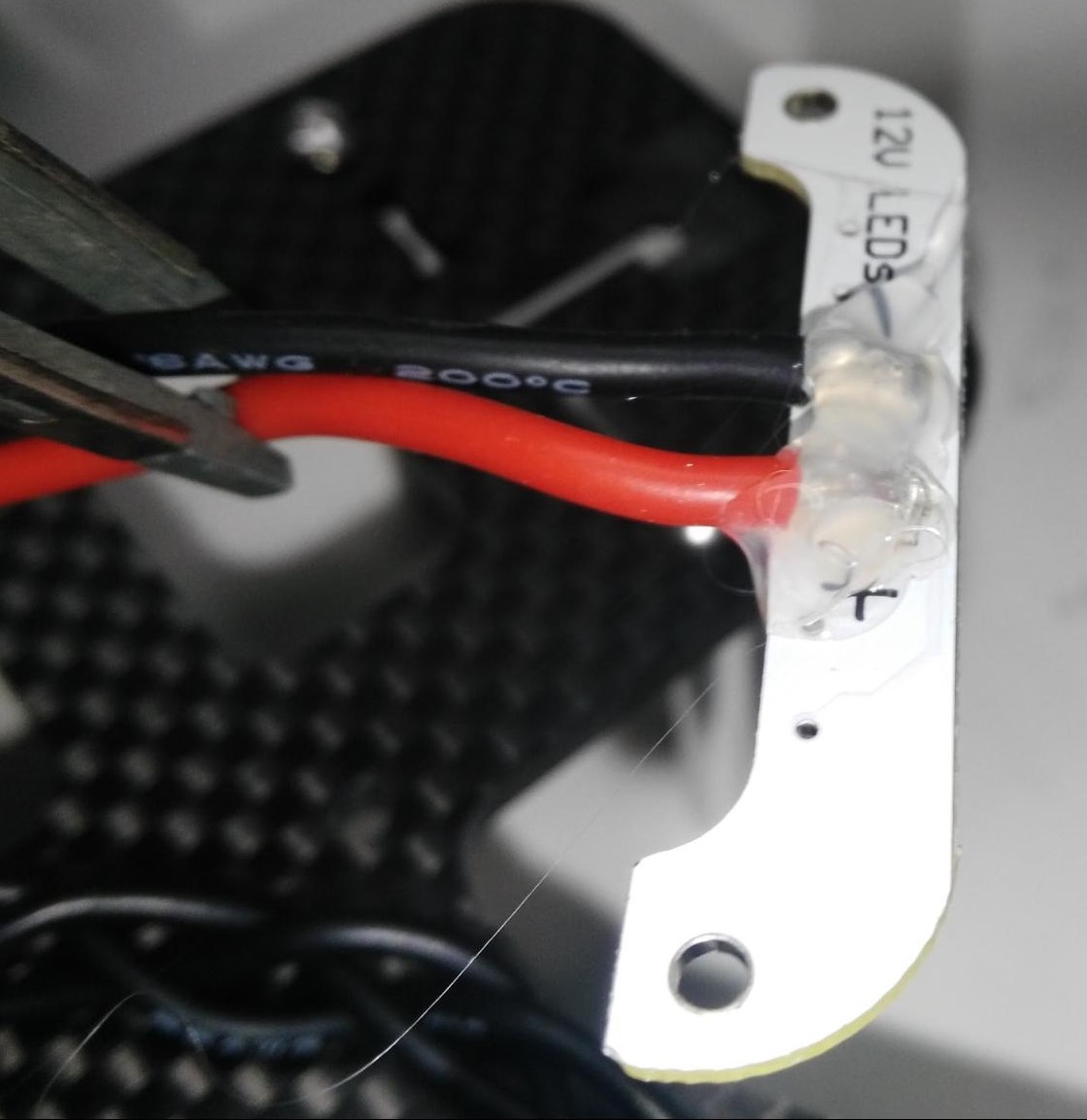
步骤4:将LED焊接到PDB
红色电缆应连接到正极焊盘,黑色电缆应连接负极焊盘。 白色LED用于正面,红色LED用于背面。
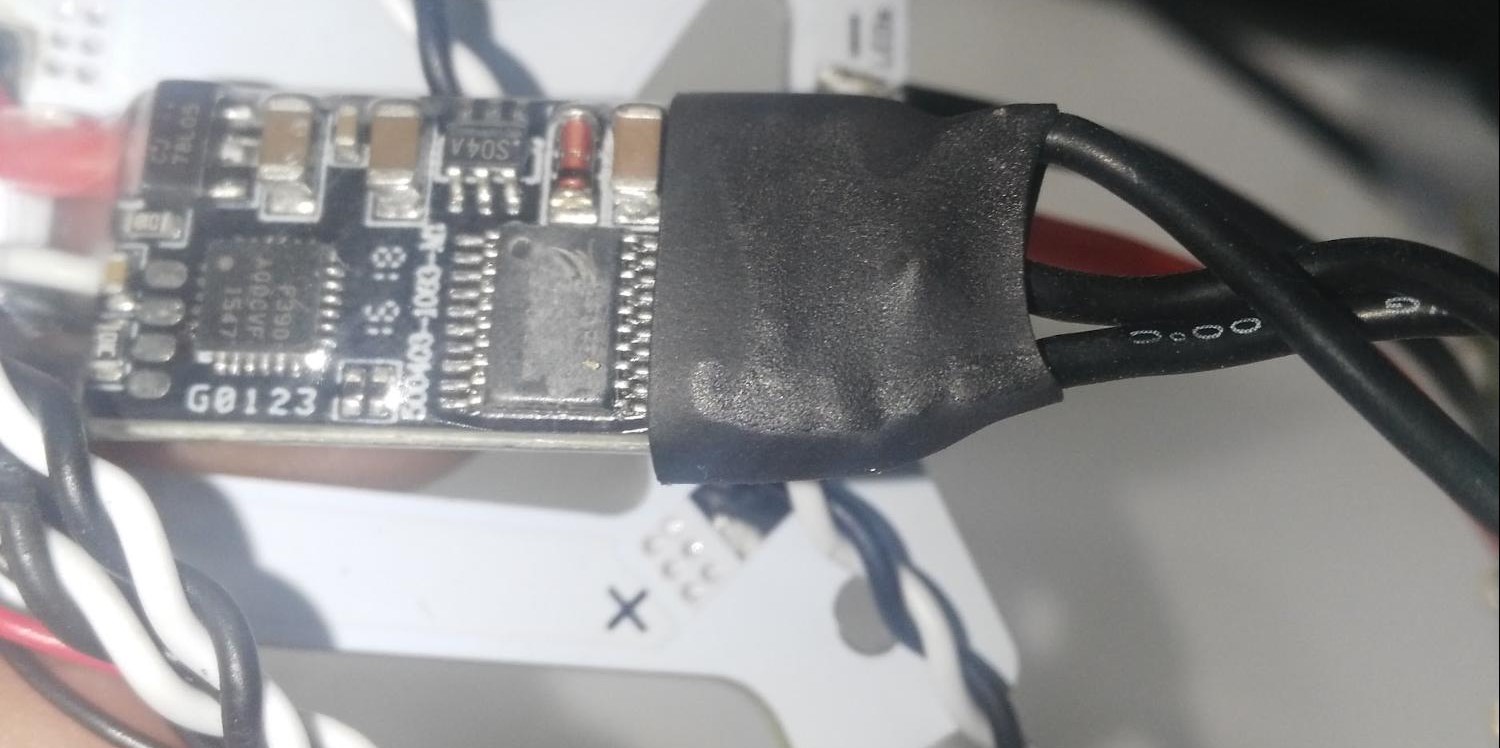
步骤5:用ESC焊接电机
将电机电缆焊接到ESC焊盘,如下所示。 确保电机转向正确的方向。 如果没有,请更换ESC上电缆A和C的位置。

一旦电缆按正确顺序焊接,用电工胶带或管道盖住焊盘。
步骤6:将PDB附加到框架
按照“框架装配”部分中描述的步骤操作。
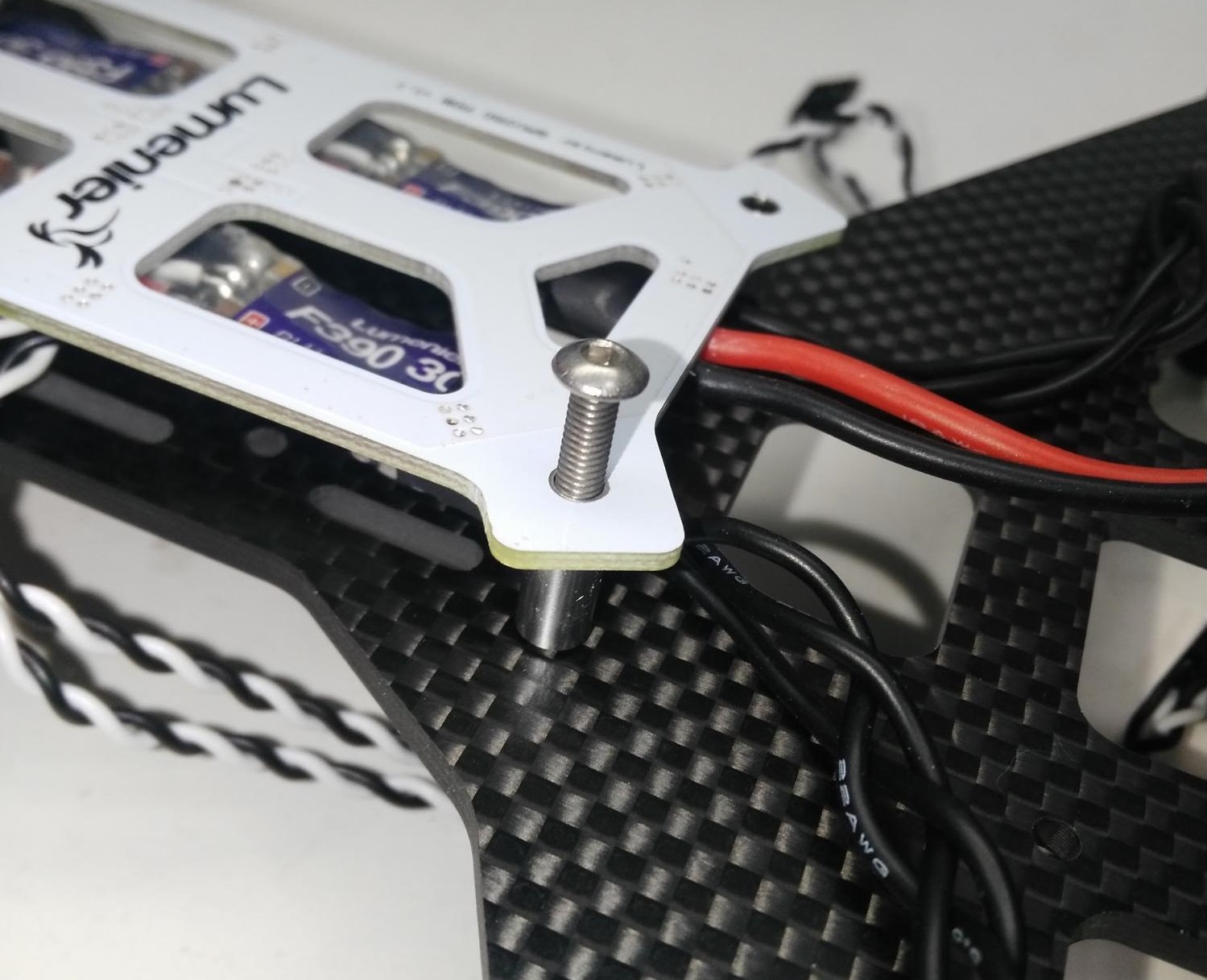
- 步骤7:使用提供的十字螺丝将LED连接到框架上。

- 碳纤维是导电的硅,以避免与框架中的焊缝接触。
- 步骤8:如图所示,将减震泡沫附着在框架上(泡沫包含在Pixhawk Mini套件中)。
- 泡沫减少了可能影响Pixhawk性能的振动。 泡沫两面都很粘。

- 步骤9:使用阻尼泡沫将Pixhawk Mini连接到框架上。
- Pixhawk的方向应使箭头朝向框架的正面。

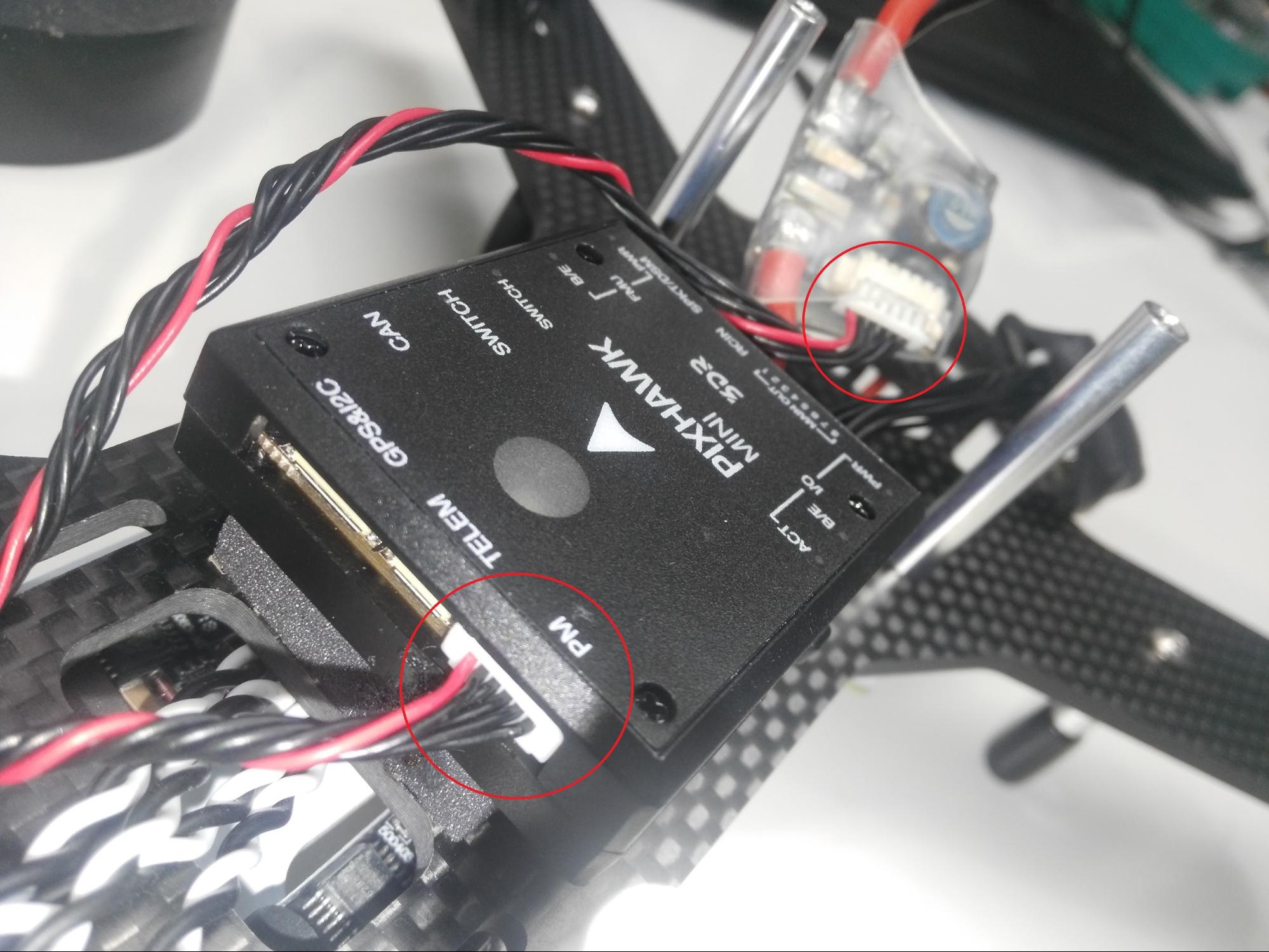
- 步骤10:连接电源模块。
- 使用随附的6针电缆连接电源模块和Pixhawk Mini(如图所示)。
- 如果您使用Pixhawk Mini套件中的电源模块,它将以相同的方式连接。
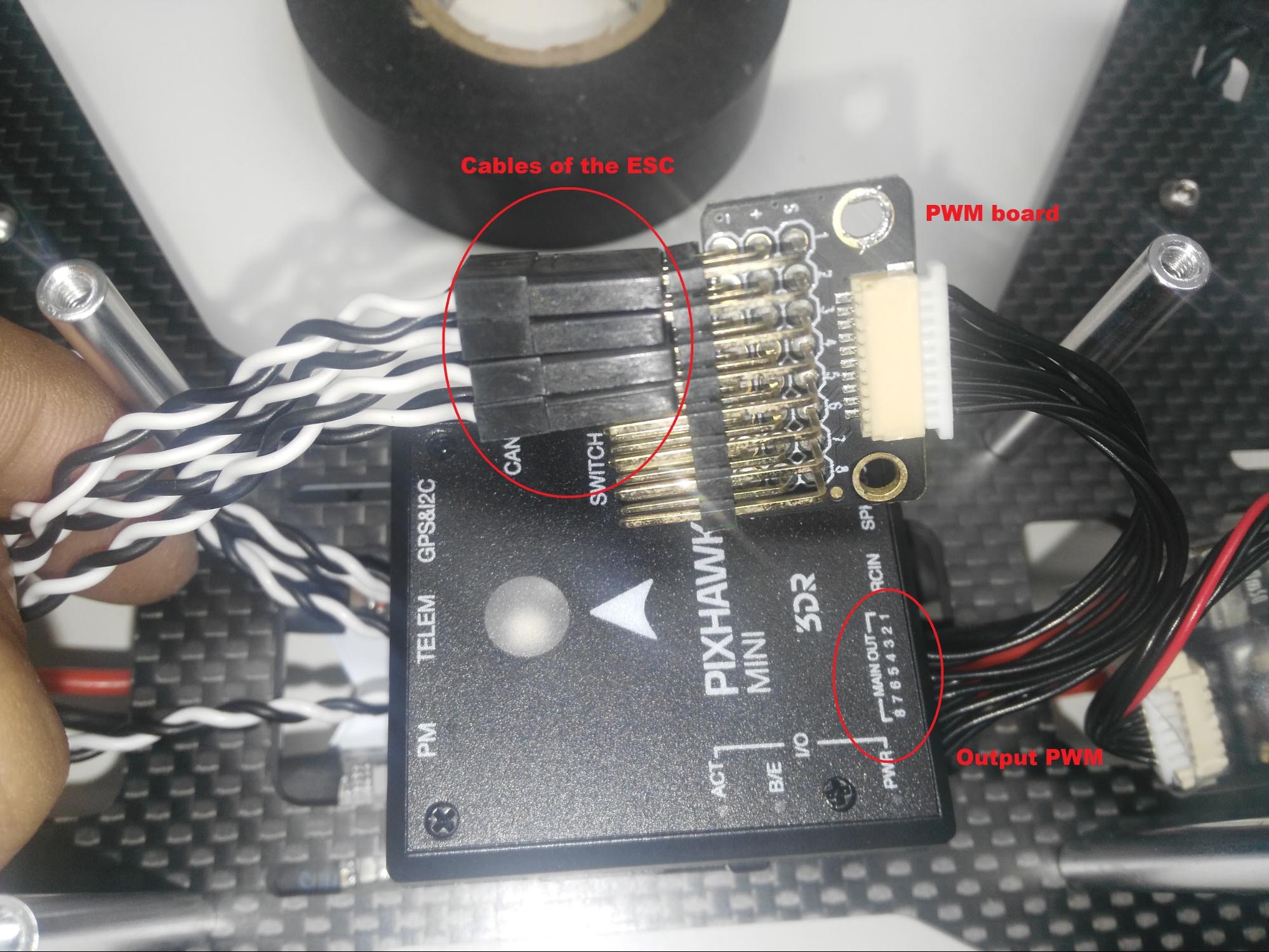
- 步骤11:将ESC连接到PWM输出
- 使用PWM输出电缆或PWM板按正确的顺序将ESC连接到Pixhawk Mini,如下所示(两者均在Pixhawk Mini套件中提供)。
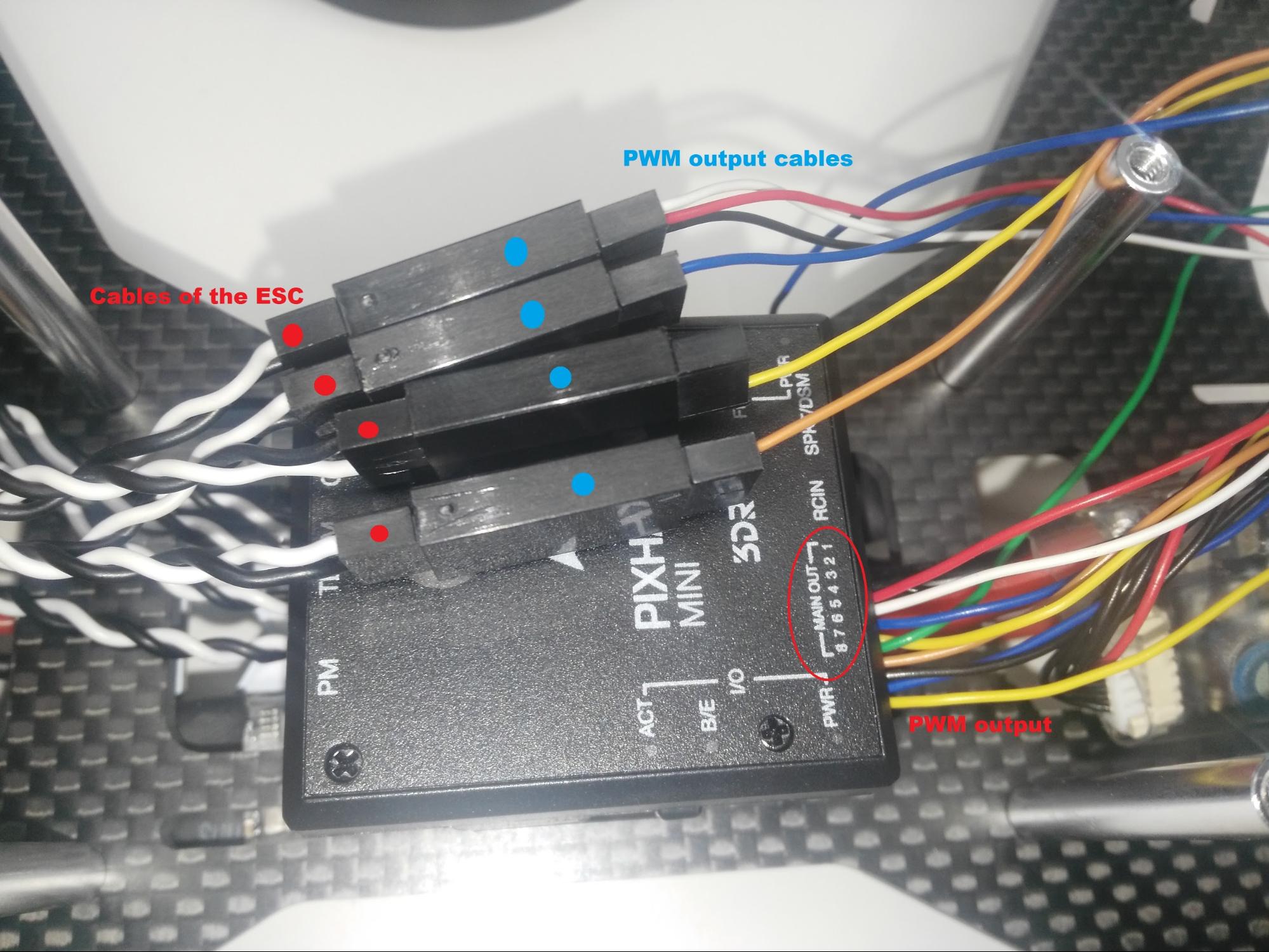
- 第12步:连接接收器
- 将FRSky D4-R接收器通道1连接到Pixhawk Mini上的RCIN端口(如图所示)。
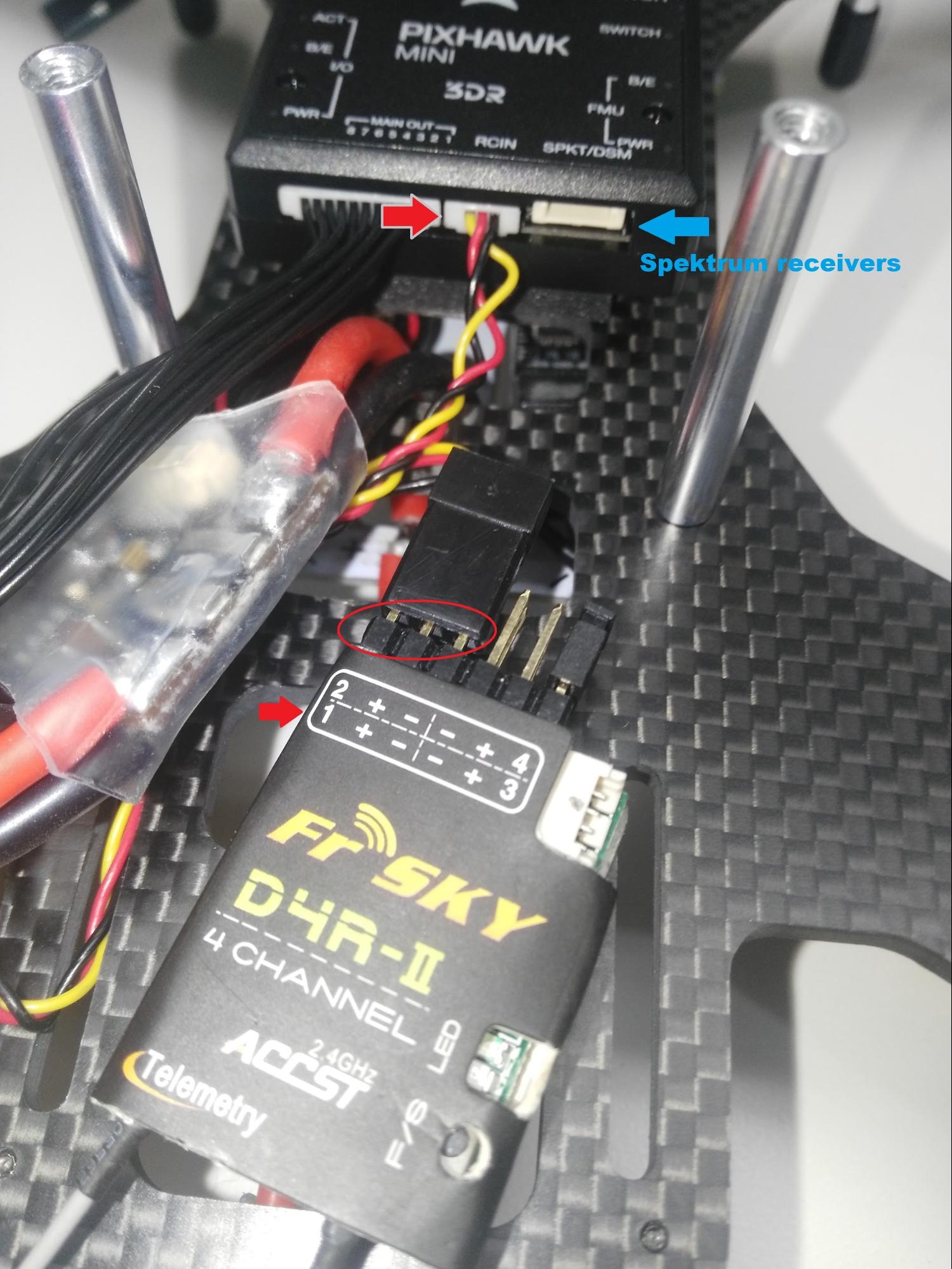
接收器注意事项:
- Pixhawk Mini RCIN端口接受PPM输入(即多路复用信道)。
- 您可以使用PWM接收器(每个通道都有单独的电缆),但您必须通过PPM编码器进行连接。
- 您也可以使用Spektrum接收器。 它们连接到Pixhawk Mini上RCIN旁边的SPKT / DSM输入。
- 有关更多信息,请参阅:Pixhawk Mini Receiver兼容性
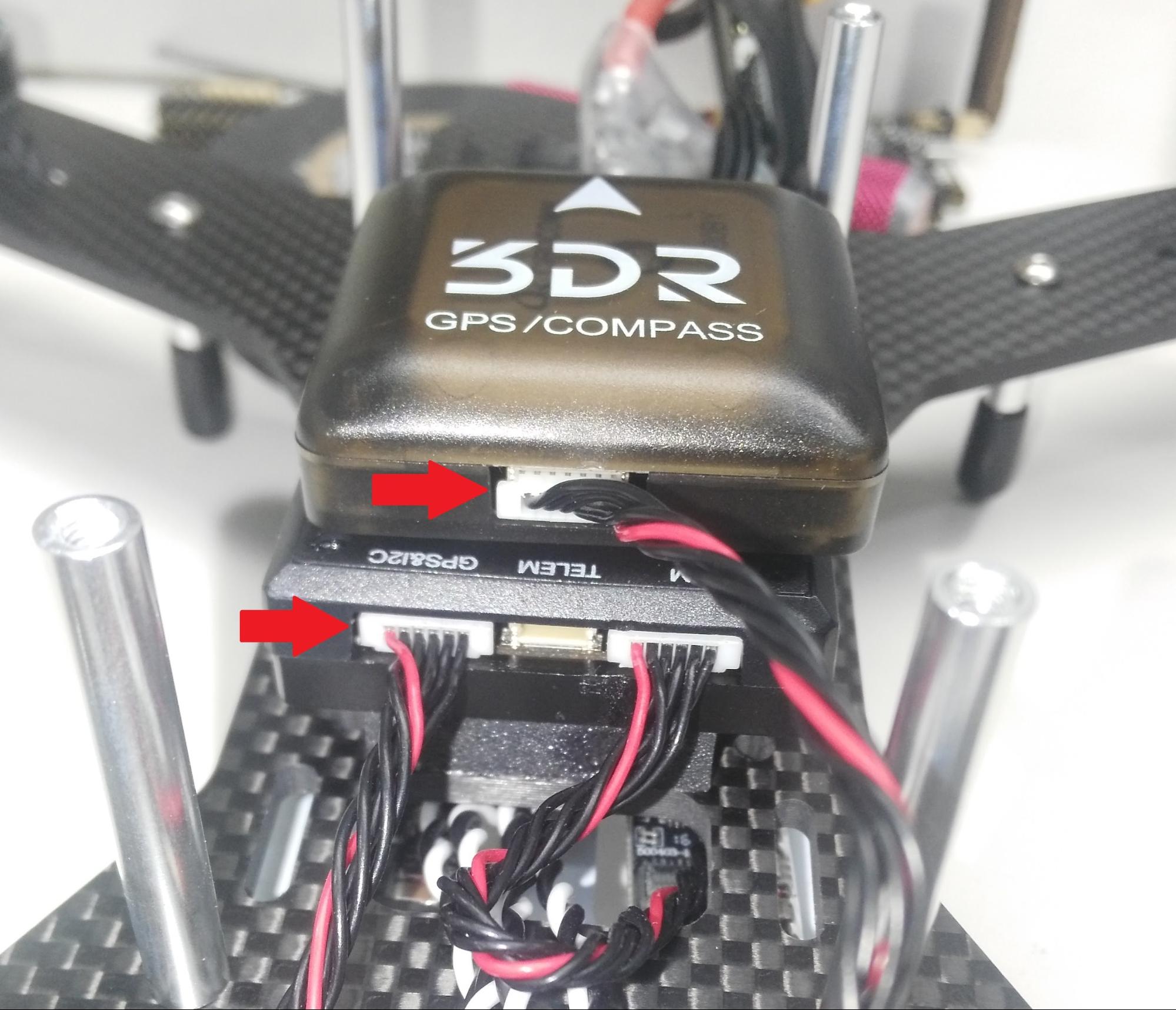
步骤13:连接GPS/COMPASS模块
将GPS/COMPASS模块连接到Pixhawk Mini的GPS和I2C端口,如下所示。
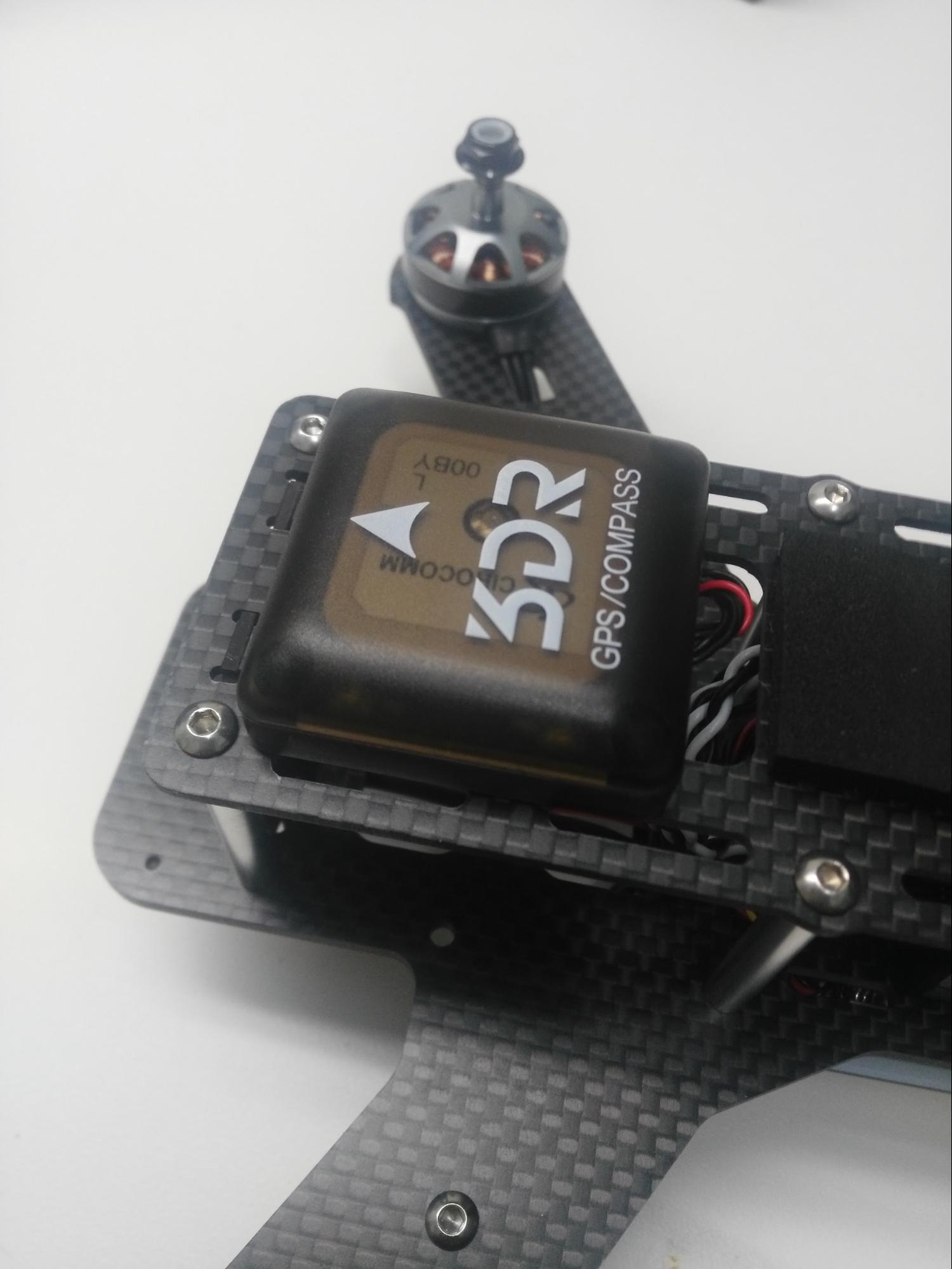
- 步骤14:安装GPS/COMPASS模块
- 安装飞行控制器盖板(参见框架组装说明),然后将GPS模块粘贴到盖板上,箭头指向前方(工具箱中包含粘贴)。
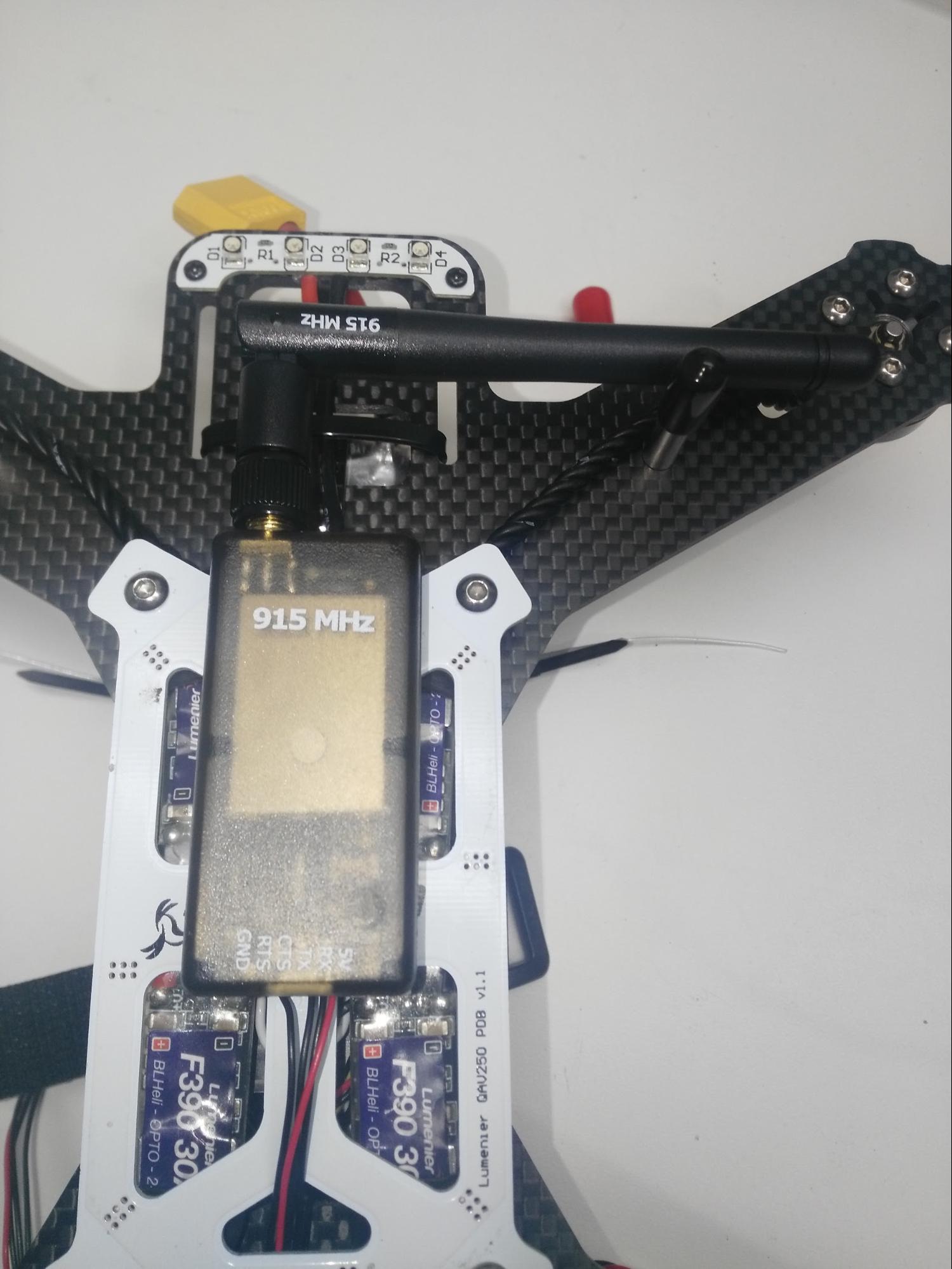
- 步骤15:连接并安装遥测无线电(可选)
- 如图所示,将遥测无线电连接到Pixhawk Mini TELEM端口。
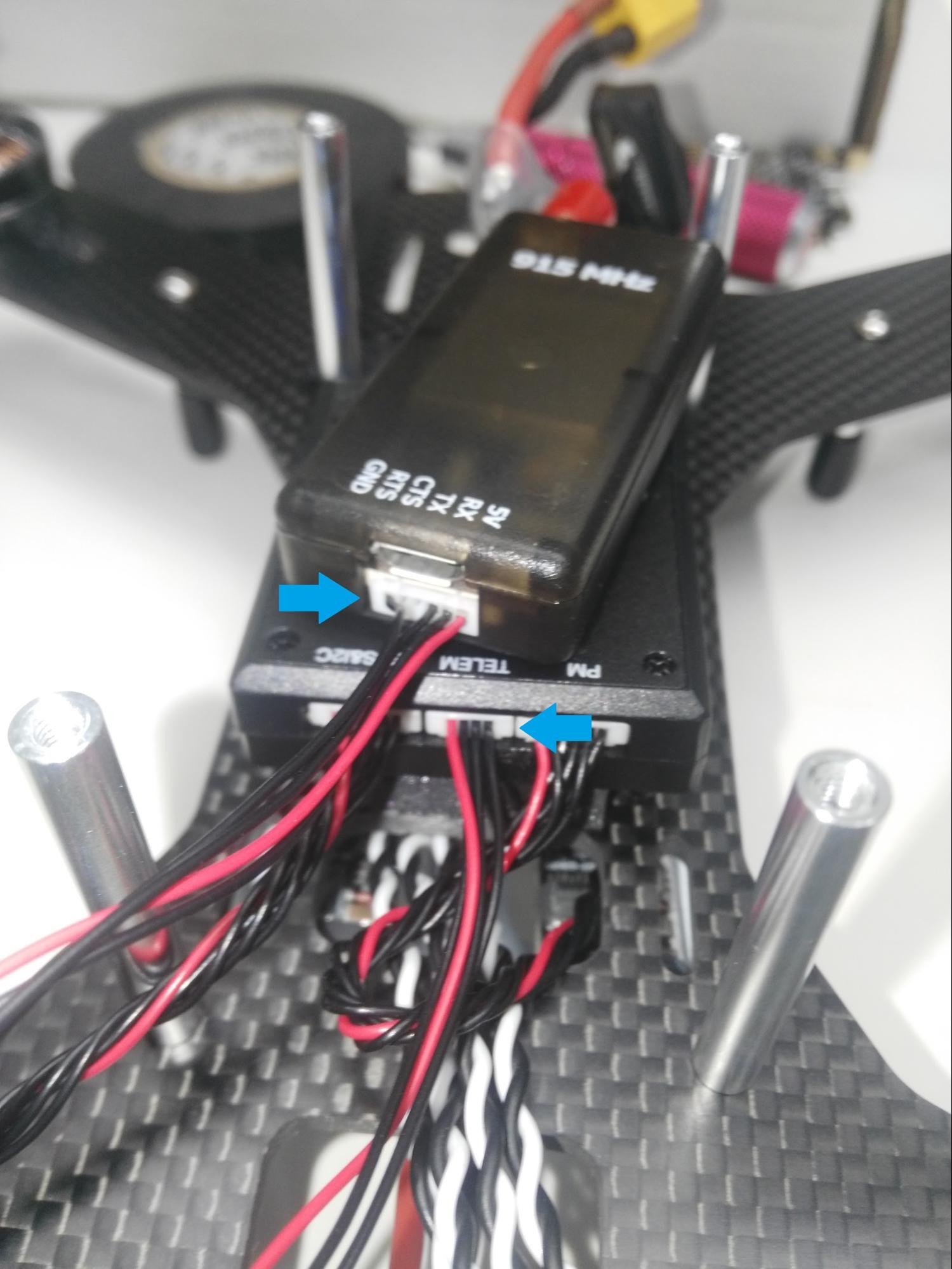
- 然后使用遥测无线电套件中包含的双面胶带安装无线电(对于此版本,我们将无线电装置安装在PDB下方,如下所示)。
- 步骤16:将着陆支架连接到臂上

- 步骤17:将电池泡沫和魔术贴电池带固定到盖板上(电池带和泡沫随框架套件一起提供)

- 框架构建现已完成! 在下一步中,我们可以安装和配置PX4自动驾驶仪。
.jpg)
PX4的安装和配置
- 本节介绍如何使用QGroundControl安装PX4自动驾驶仪并为QAV250机架配置/调整它。
- QGroundControl可用于安装和配置自动驾驶仪,还可用于远程计划任务和控制车辆。
- 下载并安装适用于您的平台的QGroundControl。
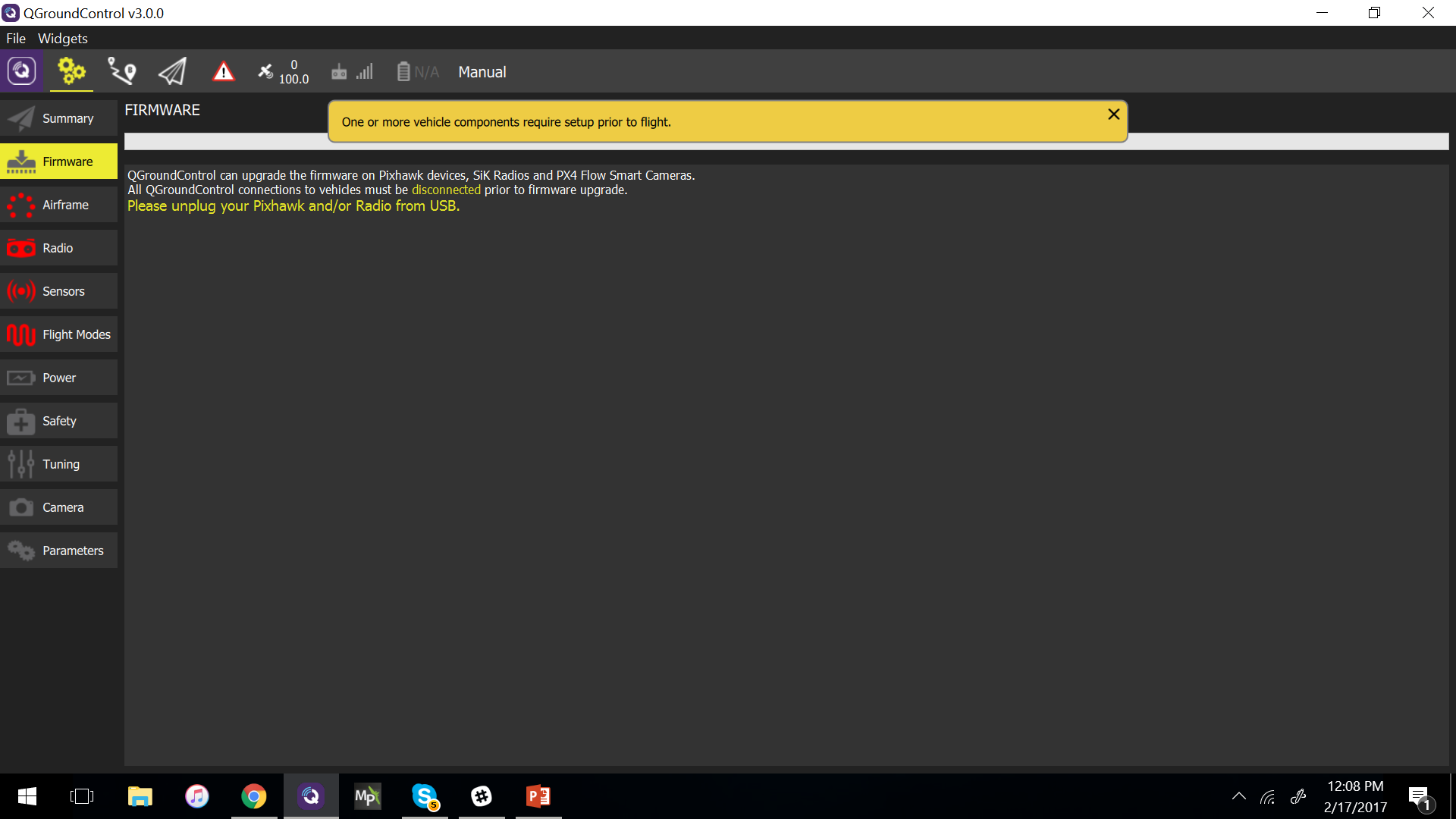
固件升级
- 使用为Lumenier QAV250配置的PX4固件更新Pixhawk Mini。
- 步骤1:启动QGroundControl并从侧栏中选择固件。 将车辆连接到USB端口
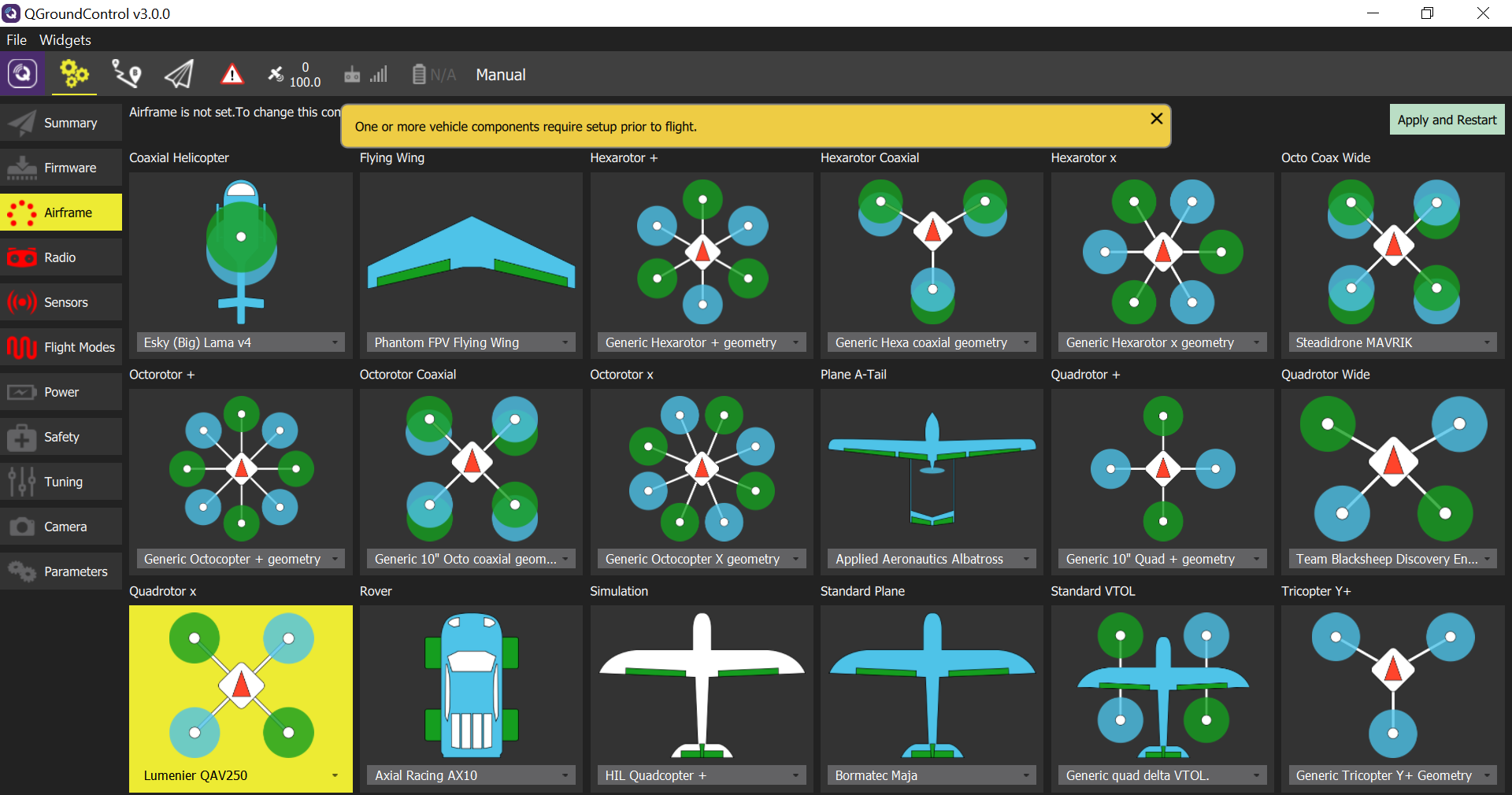
- 步骤2:选择机身(Quadrotor x> Lumenier QAV250)。
- 然后单击Apply and Restart。
有关其他信息,请参阅
车辆校准/设置
对于所有车辆,车辆校准/设置通常是类似的。 您可以按照以下说明操作,或参阅自动驾驶仪配置。
第3步:无线电校准
- 1.打开遥控器。
- 2.在左侧栏中选择Radio。
- 3.选择遥控器的“模式”(右上角)。
- 4.单击“校准”按钮,然后按照屏幕上的说明进行操作。

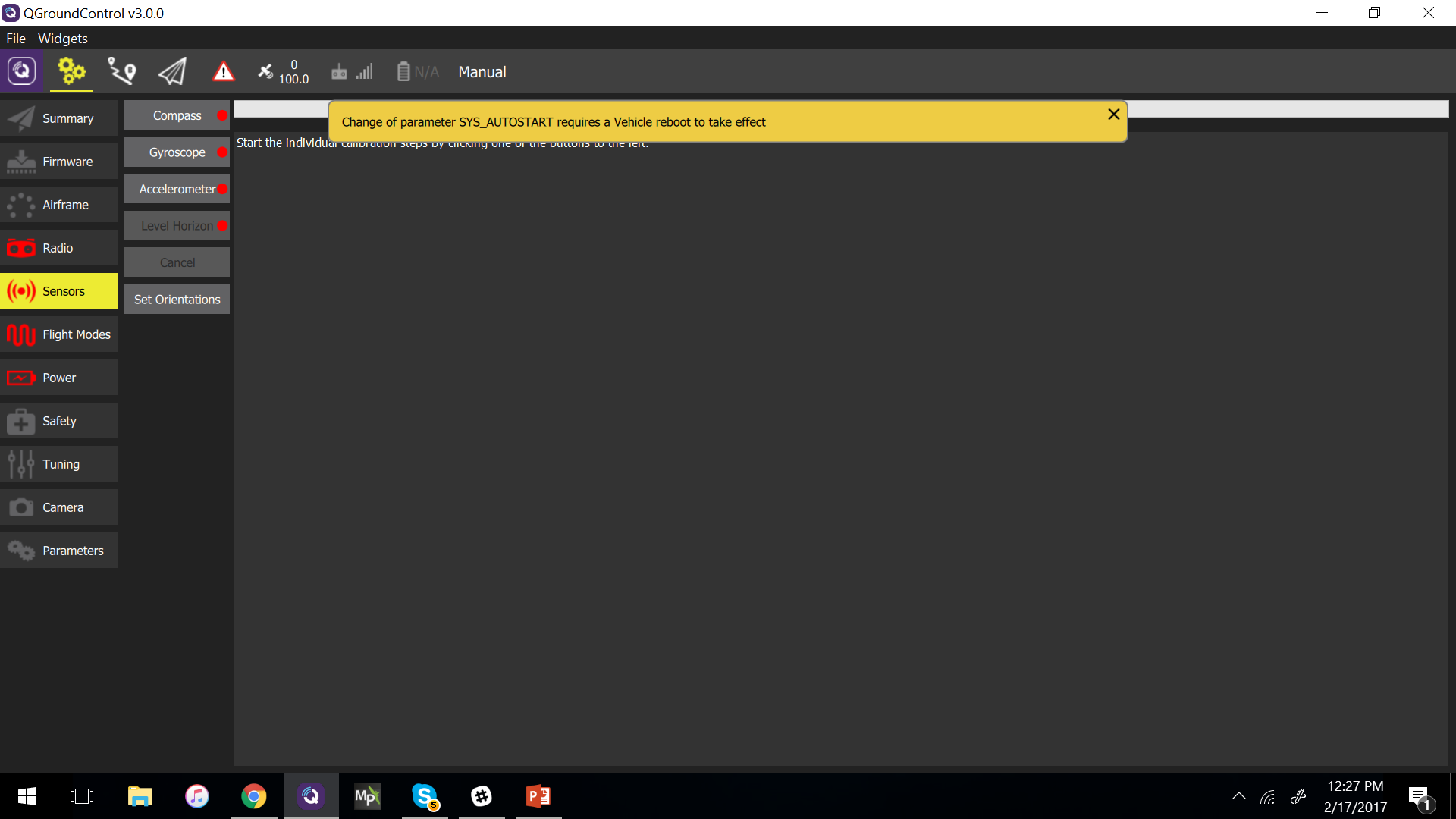
- 第4步:校准传感器
- 1.在左侧栏中选择传感器。
- 2.选择指南针按钮,然后按照屏幕上的说明进行操作。
- 3.选择陀螺仪按钮,然后按照屏幕上的说明进行操作。
- 4.选择加速度计按钮,然后按照屏幕上的说明进行操作。
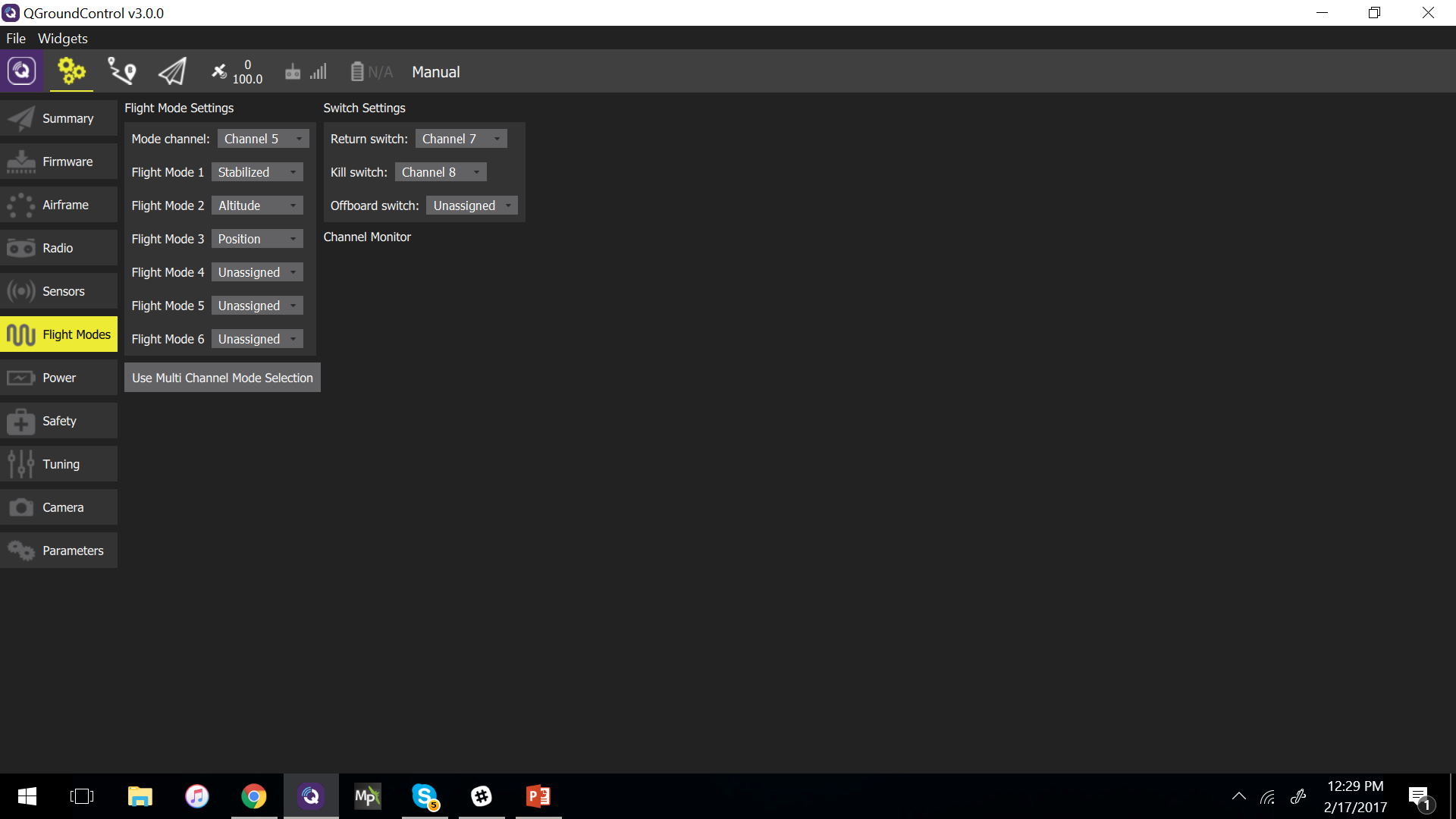
- 第5步:选择飞行模式。
- 飞行模式提供自动驾驶辅助或完全控制的飞行。
- 新用户应配置其接收器以支持以下三种模式(这使得车辆更容易飞行):
- 稳定 - 车辆难以翻转,并且如果杆被释放(但不是保持位置)将会平稳
- 高度 - 攀爬和下降被控制为具有最大速率。
- 位置 - 当释放摇杆时,车辆将停止(并保持位置抵抗风漂移)
- 有许多方法可以配置飞行模式。
- 在这种情况下,我们在接收器上有一个三向开关,我们映射到单个通道(5)。
有关更多信息,请参阅
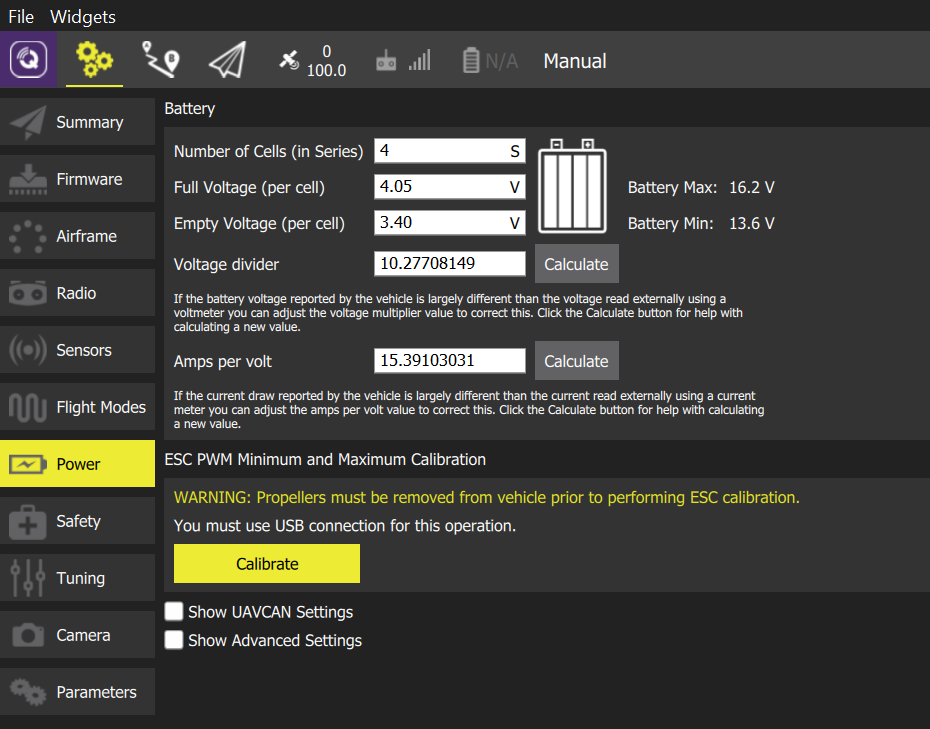
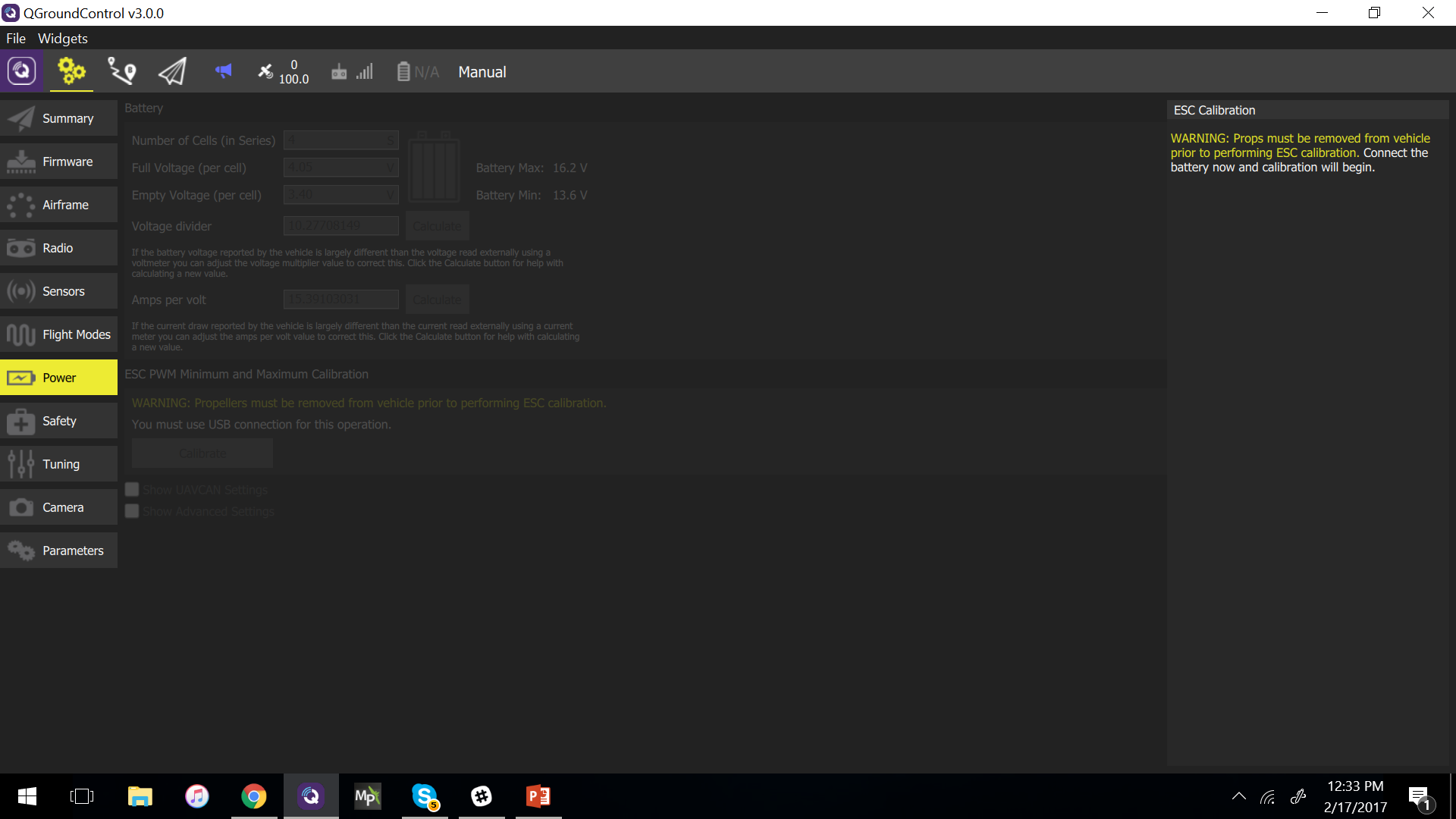
第6步:校准ESC
- 1.拆下螺旋桨。
- 在进行ESC校准之前,必须将螺旋桨从车辆上拆下!
- 2.在左侧栏中选择Power。
- 3.选择Calibrate按钮,然后按照屏幕上的说明进行操作(连接电池。当音调停止时,按OK并拔下电池电量)。
微调
- 固件安装设置为所选机身配置的默认自动驾驶仪参数(在本例中为Lumenier QAV250)。
- 由于构建可能使用不同的组件并以不同方式放置它们,因此调整特定机身构建的参数是个好主意。
- 建议此构建使用以下参数(黄色参数是已更改的参数)。 这些是通过飞行测试产生的。
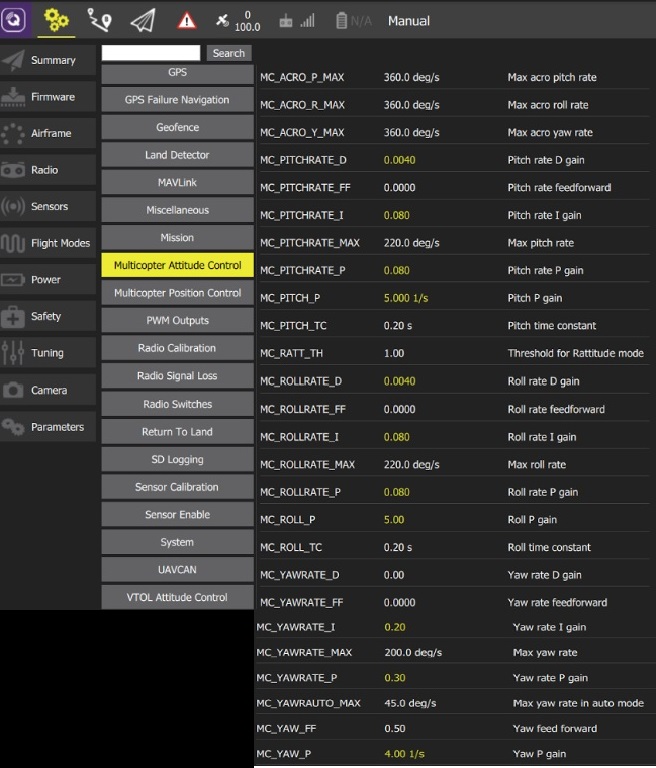
- 有关调谐的一般信息,请参阅:Multicopter PID Tuning Guide。
视频
- https://youtu.be/MZzo4DMNkug
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号