



















PX4用户指南-机身构建-多旋翼 -DJI Flame Wheel 450
PX4用户指南-机身构建-多旋翼 -DJI Flame Wheel 450
说明:
- DJI®火焰轮F450四轴飞行器专为业余航空摄影,第一人称视角应用和一般飞行娱乐而设计。
- 提供了使用Pixhawk 3 Pro飞行控制器的框架的完整构建和配置说明。
- 此外,该版本还包括RTK GPS和用于精确定位的距离传感器。
关键信息:
- 框架:DJI Flame Wheel 450
- 飞行控制器:Pixhawk 3 Pro
- 定位:RTK GPS
图片


零件清单
自动驾驶仪:Pixhawk 3 Pro
电机:3DR Iris Plus 950kv rebranded T-Motors MN2213
ESC:Hobbywing XRotor 35A Micro 3-6S BLHeli
Blades:Graupner 10“x5”(您需要打印这些适配器才能兼容M6)
距离传感器:Lidar-Lite V3
GPS:Here+ RTK GPS
遥测:3DR遥测
电池:Roxxy LiPo - 4S,4000mAh
此外,我们使用FrSky X4R-SB 3 / 16ch 2.4Ghz接收器和FrSky Taranis控制器。
如果您使用相同的Blades,您还需要扎带,双面胶带,烙铁和3D打印机。
GPS天线是从英特尔Aero重复使用的。
图片:
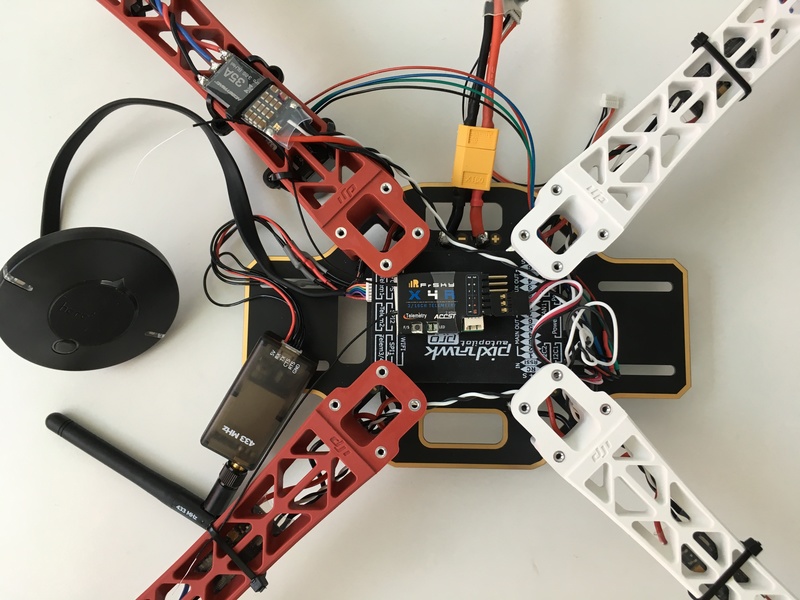
- 可以使用双面胶带连接Pixhawk 3 Pro, 可以减少震动对IMU的影响
- 在此设置中,自动驾驶仪旋转180度,以便更容易访问SD卡。
- 但是,如果您将底板旋转180度,则可以将飞行控制器板面朝前安装。
- 无论哪种方式都有效,只需确保之后在QGroundControl中正确设置电路板旋转。
接线和连接
- 可以在这里找到Pixhawk 3 Pro的通用引脚。
3DR遥测
- 3DR遥测技术没有配备Pixhawk 3 Pro使用的JST GH连接器。
- 引脚排列保持不变,只需更换插头即可。
- 使用Pixhawk 3 Pro上的Telem 1端口。
| pin | Pixhawk 3 Pro Telem 1 | 3DR Telemetry |
|---|---|---|
| 1 | VCC | VCC |
| 2 | TX | RX |
| 3 | RX | TX |
| 4 | CTS | CTS |
| 5 | RTS | RTS |
| 6 | GND | GND |
Lidar-Lite V3
- Lidar Lite V3和Pixhawk 3 Pro I2C 1端口的引脚排列如下。
| pin | Pixhawk 3 Pro I2C 1 | Lidar Lite V3 |
|---|---|---|
| 1 | VCC | VCC |
| 2 | SCL | - (Power enable) |
| 3 | SDA | - (Mode control) |
| 4 | GND | SCL |
| 5 | - | SDA |
| 6 | - | GND |
Here+ RTK GPS
- Here + GPS配有适合Pixhawk 2的8针连接器。
- 为了与Pixhawk 3 Pro(或Pixracer)一起使用,必须使用6针连接器,不需要针脚6和7(见下文))。
- 附加销用于安全按钮,如果需要也可以连接。 有关引出线的更多信息,请参见本文档,第17页。

| pin | Here+ GPS | pin | Pixhawk 3 Pro GPS |
|---|---|---|---|
| 1 | VCC_5V | 1 | VCC |
| 2 | GPS_RX | 2 | GPS_TX |
| 3 | GPS_TX | 3 | GPS_RX |
| 4 | SCL | 4 | SCL |
| 5 | SDA | 5 | SDA |
| 6 | BUTTON | - | - |
| 7 | BUTTON_LED | - | - |
| 8 | GND | 6 | GND |
配置:
- 有关如何在QGroundControl中设置四边形的一般文档可以在基本配置中找到。
- 具体设置说明如下。
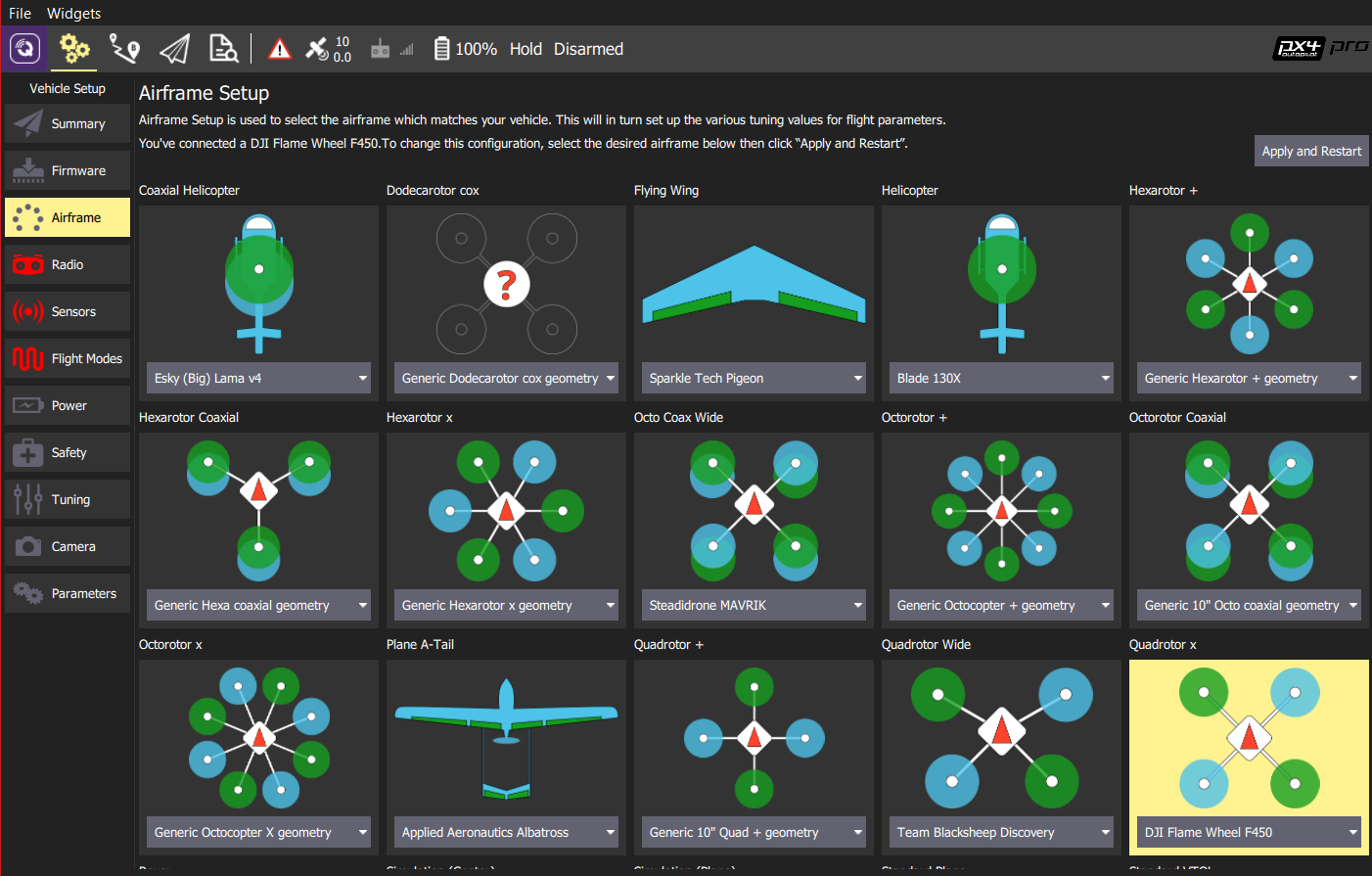
Airframe
- 在QGC>机身> Quadrotor x中选择机身DJI Flame Wheel 450。
RTK GPS
- RTK GPS即插即用。 有关更多说明,请参见此处
Lidar-Lite
- 要启用Lidar-Lite V3(通过I2C连接),必须将参数SENS_EN_LL40LS设置为I2C。
- 这可以在QGroundControl参数中完成,如下所示:
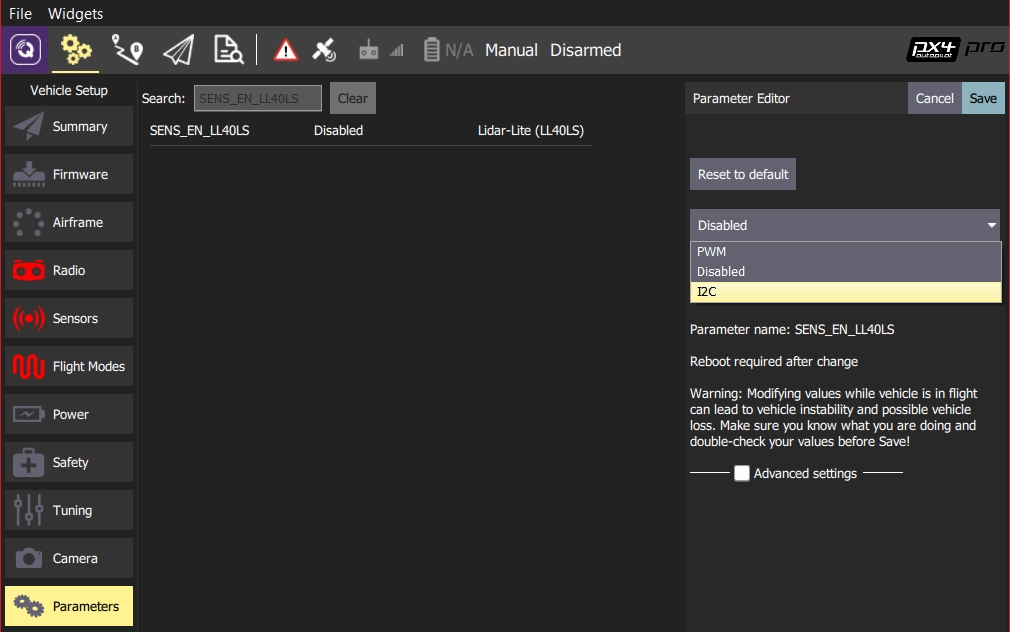
- 设置SENS_EN_LL40LS后,您需要重新启动飞行控制器。
其他
- 同样设置以下参数:
EKF2_HGT_MODE = 2:这确保Lidar-Lite用作高度源
MAV_PROTO_VER = 2:使用MAVLink协议版本2
CBRK_IO_SAFETY = 22027:禁用安全按钮
EKF2_GPS_POS_X,EKF2_GPS_POS_Y,EKF2_GPS_POS_Z:设置相对于电路板的GPS设备偏移(NED坐标)。
- 视频:https://youtu.be/JovSwzoTepU
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号