



















PX4用户指南-基本组装-pixhawk4 连线
PX4用户指南-基本组装-pixhawk4 连线
说明:
- 介绍了如何为Pixhawk4®飞行控制器供电并连接其最重要的外围设备。
![]()
接线图概述
- 下图显示了如何连接最重要的传感器和外围设备(电机和伺服输出除外)。
- 我们将在以下部分详细介绍其中的每一个。

安装和定向控制器
- Pixhawk 4应使用减震泡沫垫(包含在套件中)安装在框架上。
- 它应尽可能靠近车辆的重心定位,顶部朝上,箭头指向车辆前部。
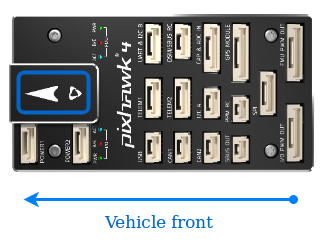
- 如果控制器无法以推荐/默认方向安装(例如由于空间限制),则需要使用您实际使用的方向配置自动驾驶仪软件:飞行控制器方向。
GPS+指南针+蜂鸣器+安全开关+LED
- 将提供的GPS与集成指南针,安全开关,蜂鸣器和LED连接到GPS MODULE端口。
- GPS/指南针应安装在框架上,尽可能远离其他电子设备,方向标记朝向车辆前方
- 将指南针与其他电子设备分开将减少干扰
- 默认情况下启用GPS模块的集成安全开关(启用后,PX4将不允许您解锁车辆)。
- 要禁用安全按钮并按住安全开关1秒钟。
- 您可以再次按下安全开关以启用安全和锁定车辆(这将非常有用,如果由于某种原因您无法从遥控器或地面站锁定车辆)。
电源
- 使用6线电缆将套件随附的电源管理板(PM板)的输出连接到Pixhawk 4的POWERk块。
- PM输入2~12S将连接到LiPo电池。
- 电源管理板的连接,包括电源和与ESC和伺服系统的信号连接,在下表中说明。
- 请注意,PM板不通过FMU PWM-OUT的+和 - 引脚为伺服电源供电。
- 下图显示了Pixhawk 4提供的电源管理板。
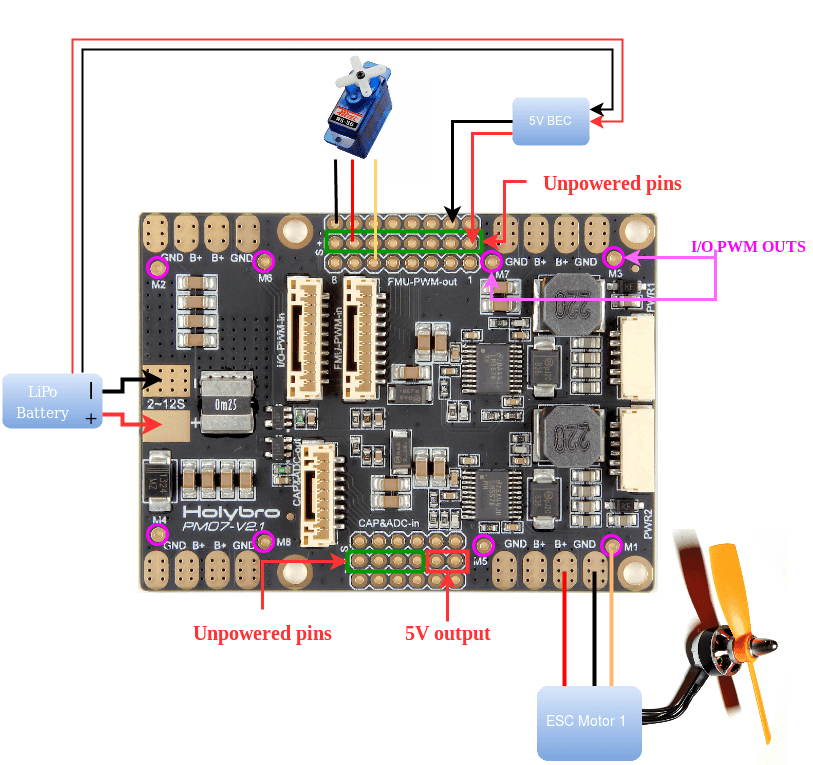
- 如果使用飞机或车,FMU PWM-OUT的8针电源(+)导轨将需要单独供电,以便为方向舵,升降机等驱动伺服系统。
- 为此,需要将电源导轨连接到 BEC配备ESC或独立的5V BEC或2S LiPo电池。
- 小心你要在这里使用的伺服电压。
| PIN&Connector | Function |
|---|---|
| I/O PWM-IN | See note below for connection to Pixhawk 4 |
| M1 | I/O PWM OUT 1: connect signal wire to ESC of motor 1 here |
| M2 | I/O PWM OUT 2: connect signal wire to ESC of motor 2 here |
| M3 | I/O PWM OUT 3: connect signal wire to ESC of motor 3 here |
| M4 | I/O PWM OUT 4: connect signal wire to ESC of motor 4 here |
| M5 | I/O PWM OUT 5: connect signal wire to ESC of motor 5 here |
| M6 | I/O PWM OUT 6: connect signal wire to ESC of motor 6 here |
| M7 | I/O PWM OUT 7: connect signal wire to ESC of motor 7 here |
| M8 | I/O PWM OUT 8: connect signal wire to ESC of motor 8 here |
| FMU PWM-IN | See note below for connection to Pixhawk 4 |
| FMU PWM-OUT | If FMU PWM-IN is connected to Pixhawk 4, connect signal wires to ESC or signal, +, - wires to servos here |
| CAP&ADC-OUT | connect to CAP & ADC IN port of Pixhawk 4 |
| CAP&ADC-IN | CAP&ADC input: Pinouts are printed on the back side of the board |
| B+ | connect to ESC B+ to power the ESC |
| GND | connect to ESC Ground |
| PWR1 | 5v output 3A, connect to Pixhawk 4 POWER 1 |
| PWR2 | 5v output 3A, connect to Pixhawk 4 POWER 2 |
| 2~12S | Power Input, connect to 12S LiPo Battery |
根据您的机身类型,请参阅机身参考,将Pixhawk 4的I/O PWM OUT和FMU PWM OUT端口连接到PM板。
PX4固件中的MAIN输出映射到Pixhawk 4的I/O PWM OUT端口,而AUX输出映射到Pixhawk 4的FMU PWM OUT。
例如,MAIN1映射到I/O PWM OUT的IO_CH1引脚,AUX1映射到FMU的FMU_CH1引脚 PWM OUT。
PM板的FMU PWM-IN内部连接到FMU PWM-OUT,用于驱动伺服系统(例如副翼,升降舵,方向舵,升降舵,齿轮,襟翼,万向节,转向)。
PM板的I/O PWM-IN内部连接到M1-8,M1-8用于驱动电机(例如Plane,VTOL和Rover中的油门)。
下表总结了如何将Pixhawk 4的PWM OUT端口连接到PM板的PWM-IN端口,具体取决于机身参考。
| Airframe Reference | Connection between Pixhawk 4 --> PM board |
|---|---|
| MAIN: motor | I/O PWM OUT --> I/O PWM IN |
| MAIN: servo | I/O PWM OUT --> FMU PWM IN |
| AUX: motor | FMU PWM OUT --> I/O PWM IN |
| AUX: servo | FMU PWM OUT --> FMU PWM IN |
- Pixhawk 4电源端口的引脚排列如下所示。
- 默认情况下,CURRENT信号应承载0-3.3V的模拟电压,0-120A。
- 默认情况下,VOLTAGE信号应承载0-3.3V的模拟电压,0-60A。
- VCC线路必须提供至少3A连续电流,并且应默认为5.1V。 较低的5V电压仍然可以接受,但不鼓励。
| Pin | Signal | Volt |
|---|---|---|
| 1(red) | VCC | +5V |
| 2(black) | VCC | +5V |
| 3(black) | CURRENT | +3.3V |
| 4(black) | VOLTAGE | +3.3V |
| 5(black) | GND | GND |
| 6(black) | GND | GND |
- 使用套件随附的电源模块,您需要在电源设置中配置电池数量,但不需要校准分压器。
- 如果您使用任何其他电源模块(例如Pixracer中的电源模块),则必须更新分压器。
无线电控制
如果您想手动控制车辆,则需要遥控(RC)无线电系统(PX4不需要无线电系统用于自主飞行模式)。
您需要选择兼容的发送器/接收器,然后绑定它们以便它们进行通信(阅读特定发送器/接收器附带的说明)。
以下说明显示如何将不同类型的接收器连接到Pixhawk 4:
Spektrum/DSM或S.BUS接收器连接到DSM/SBUS RC输入。

PPM接收器连接到PPM RC输入端口。
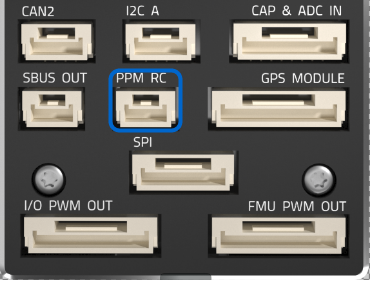
- 每个通道都有单独导线的PPM和PWM接收器必须通过像这样的PPM编码器连接到PPM RC端口
- (PPM-Sum接收器对所有通道使用单根信号线)。
- 有关选择无线电系统,接收器兼容性以及绑定发射器/接收器对的详细信息,请参阅:遥控发射器和接收器。
遥测无线电(可选)
- 遥测无线电可用于从地面站传送和控制飞行中的车辆(例如,您可以将UAV指向特定位置,或上传新任务)。
- 基于车载的无线电应连接到TELEM1端口,如下所示(如果连接到此端口,则无需进一步配置)。
- 另一台无线电设备连接到地面站计算机或移动设备(通常通过USB)。

SD卡(可选)
- SD卡最常用于记录和分析航班详细信息。
- 将卡(包含在Pixhawk 4套件中)插入Pixhawk 4,如下所示。

- 强烈推荐使用SanDisk Extreme U3 32GB(开发者指南)。
电机
- 电机/伺服系统按照机身参考中为您的车辆指定的顺序连接到I/O PWM OUT(MAIN)和FMU PWM OUT(AUX)端口。
- 此参考列出了所有支持的空气和地面框架的输出端口到电机/伺服映射
- (如果您的框架未在参考中列出,则使用正确类型的“通用”机身)。
其他外围设备
- 可选/不常用组件的接线和配置包含在各个外围设备的主题中。
配置
- 常规配置信息包含在:自动驾驶仪配置中。
- 此处介绍了QuadPlane特定配置:QuadPlane VTOL配置
更多信息
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号