



















TEB轨迹规划算法教程-优化反馈
TEB轨迹规划算法教程-优化反馈
说明:
- 介绍如何检查优化轨迹的反馈; 提供了一个示例,其可视化当前所选轨迹的速度分布
- 在前面的示例中,您学习了如何测试优化,如何调整参数以及如何在rviz中可视化生成的轨迹。
- 然而,在rviz中可视化的轨迹不包含任何时间信息,仅显示其空间状态。
- 为了进一步参数调整或评估目的,可能有兴趣获得对底层优化状态的访问(涉及时间优化状态)。
- 因此teb_local_planner提供反馈消息teb_local_planner/FeedbackMsg,其包含所有内部状态和一些推断变量(如速度曲线)。
- 请注意,加速度曲线当前为空。
- 此外,该消息包含在独特拓扑中找到的所有备选轨迹。
- 当前选择的轨迹索引存储在变量selected_trajectory_idx中。
- 反馈主题(参见规划器API)可以由任何节点订阅(例如,将数据导出到文件,编写一些自定义可视化,......)。
注意:
- 默认情况下关闭发送反馈消息以减轻计算负担。
- 可以通过将rosparam ~/publish_feedback设置为true或通过调用rqt_reconfigure来启用它。
可视化速度曲线
- 在下文中,提供了一个小的python脚本,它订阅了上一个教程中介绍的test_optim_node。
- 脚本取决于pypose以创建绘图。
- 仅显示当前所选轨迹的速度分布。
- 脚本如下:
#!/usr/bin/env python
import rospy, math
from teb_local_planner.msg import FeedbackMsg, TrajectoryMsg, TrajectoryPointMsg
from geometry_msgs.msg import PolygonStamped, Point32
import numpy as np
import matplotlib.pyplot as plotter
def feedback_callback(data):
global trajectory
if not data.trajectories: # empty
trajectory = []
return
trajectory = data.trajectories[data.selected_trajectory_idx].trajectory
def plot_velocity_profile(fig, ax_v, ax_omega, t, v, omega):
ax_v.cla()
ax_v.grid()
ax_v.set_ylabel('Trans. velocity [m/s]')
ax_v.plot(t, v, '-bx')
ax_omega.cla()
ax_omega.grid()
ax_omega.set_ylabel('Rot. velocity [rad/s]')
ax_omega.set_xlabel('Time [s]')
ax_omega.plot(t, omega, '-bx')
fig.canvas.draw()
def velocity_plotter():
global trajectory
rospy.init_node("visualize_velocity_profile", anonymous=True)
topic_name = "/test_optim_node/teb_feedback" # define feedback topic here!
rospy.Subscriber(topic_name, FeedbackMsg, feedback_callback, queue_size = 1)
rospy.loginfo("Visualizing velocity profile published on '%s'.",topic_name)
rospy.loginfo("Make sure to enable rosparam 'publish_feedback' in the teb_local_planner.")
# two subplots sharing the same t axis
fig, (ax_v, ax_omega) = plotter.subplots(2, sharex=True)
plotter.ion()
plotter.show()
r = rospy.Rate(2) # define rate here
while not rospy.is_shutdown():
t = []
v = []
omega = []
for point in trajectory:
t.append(point.time_from_start.to_sec())
v.append(point.velocity.linear.x)
omega.append(point.velocity.angular.z)
plot_velocity_profile(fig, ax_v, ax_omega, np.asarray(t), np.asarray(v), np.asarray(omega))
r.sleep()
if __name__ == '__main__':
try:
trajectory = []
velocity_plotter()
except rospy.ROSInterruptException:
pass
- 该脚本已作为visualize_velocity_profile.py包含在teb_local_planner_tutorials包中。
- 假设roscore已经运行,可以将速度可视化如下:
rosparam set /test_optim_node/publish_feedback true # or use rqt_reconfigure later
roslaunch teb_local_planner test_optim_node.launch
rosrun teb_local_planner_tutorials visualize_velocity_profile.py # or call your own script here
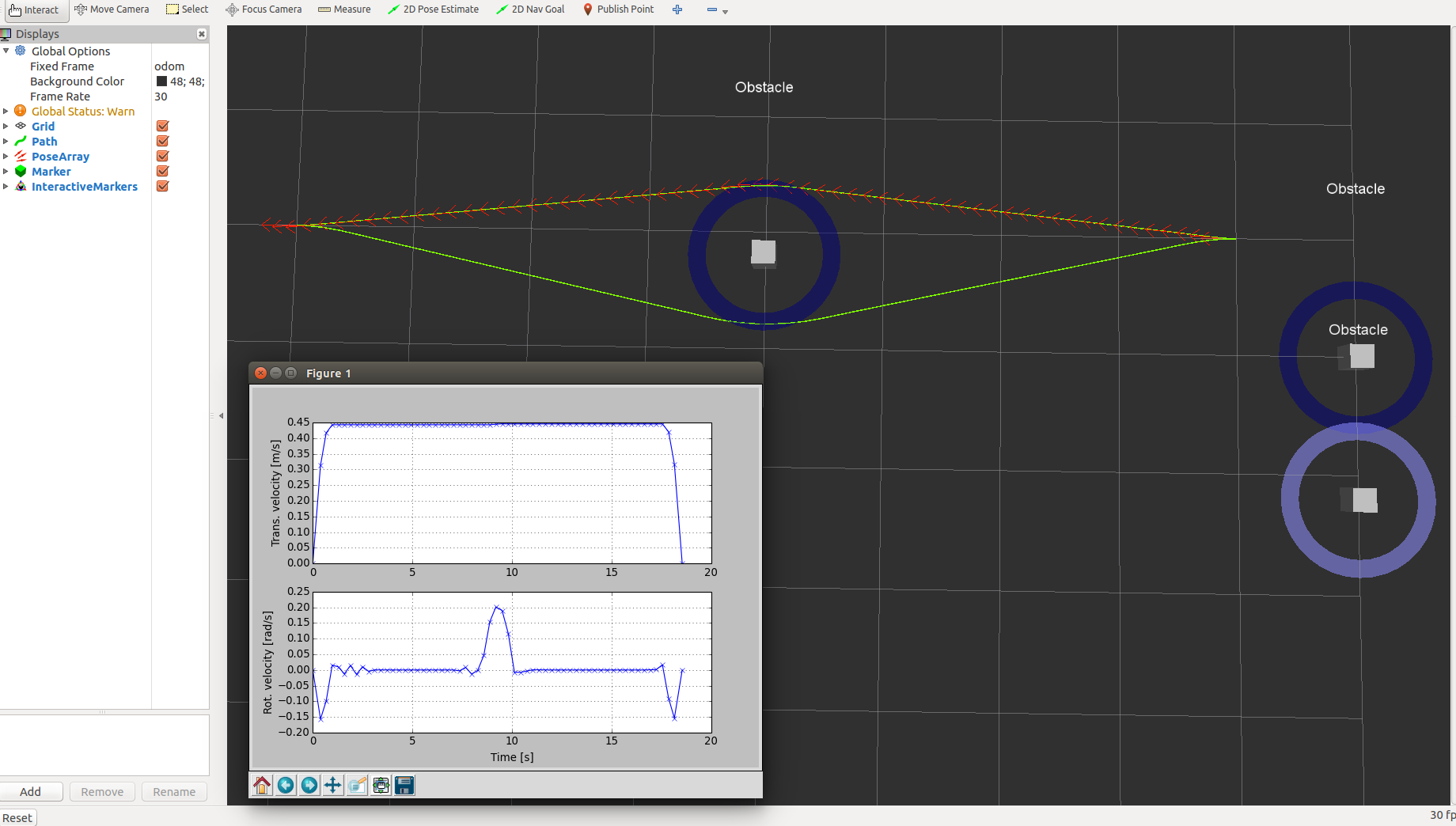
- 您应该能够在运行时检查速度曲线,如下图所示:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号