



















ROS探索总结-46.ROS机器人实例 (PR2)
ROS探索总结-46.ROS机器人实例 (PR2)
概要
PR2(Personal Robot 2,个人机器人2代)是Willow Garage公司设计的机器人平台,其中数字2代表第二代机器人。
PR2有两条手臂,每条手臂七个关节,手臂末端是一个可以张合的夹爪;PR2依靠底部的四个轮子移动,在头部、胸部、肘部、夹爪上分别安装有高分辨率摄像头、激光测距仪、惯性测量单元、触觉传感器等丰富的传感设备。在PR2的底部有两台八核电脑作为机器人各硬件的控制和通信中枢,并且都安装了Ubuntu和ROS系统。

PR2和ROS有千丝万缕的关系,可以说ROS产生于PR2,也促成了PR2。ROS原本是Willow Garage为复杂的PR2机器人平台设计的软件框架,依靠强大的ROS,PR2可以独立完成多种复杂的任务,例如PR2可以自己开门、找到插头给自己充电、打开冰箱取出啤酒、打简单的台球等等。只不过PR2价格高昂,而且能力还达不到商业应用的要求,如今主要用于学术研究。
可见,PR2是ROS中元老级的机器人平台,所有软件代码依托于ROS,并且全部在ROS社区中开放源代码,为我们学习、应用ROS提供了丰富的资源。
一、 PR2功能包安装
在ROS Kinetic中,大部分PR2功能包还无法支持,官方推荐使用ROS Indigo运行PR2。
首先使用如下命令安装PR2机器人的相关功能包:
$ sudo apt-get install ros-indigo-pr2-*
- 以上命令主要安装了下表中PR2机器人相关的ROS功能包。
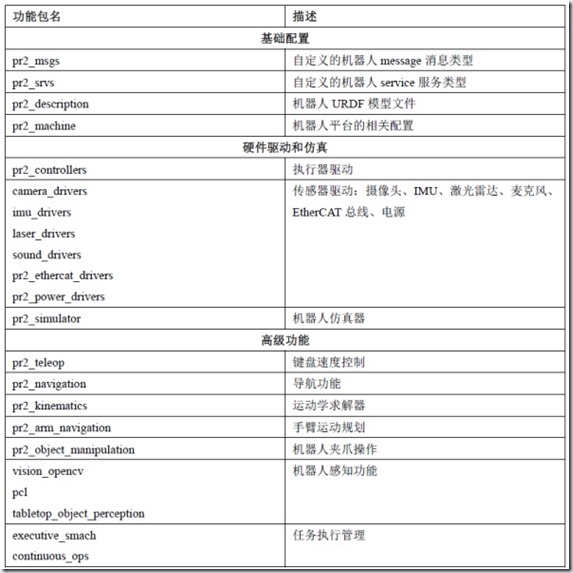
- PR2机器人售价昂贵,大多数人都无法接触到,所以这里我们使用仿真器运行PR2的相关功能。
二、 Gazebo中的PR2
- 使用如下命令启动gazebo仿真环境,并使用pr2.launch将机器人加载到gazebo中:
$ roslaunch gazebo_ros empty_world.launch
$ roslaunchpr2_gazebo pr2.launch
- 也可以使用pr2_gazebo功能包中的pr2_empty_world.launch一次性启动gazebo并加载机器人模型:
$ roslaunch pr2_gazebo pr2_empty_world.launch
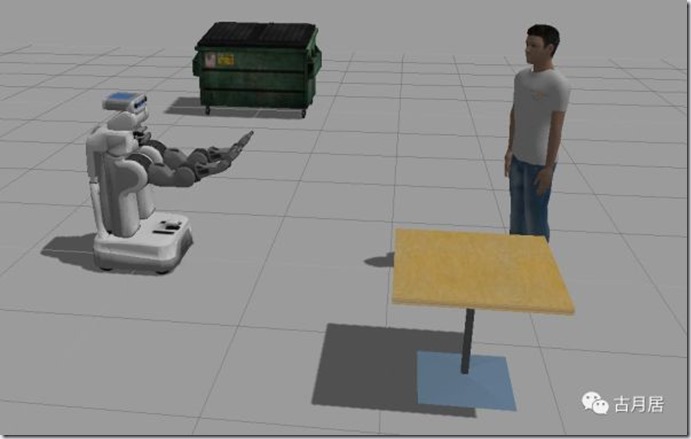
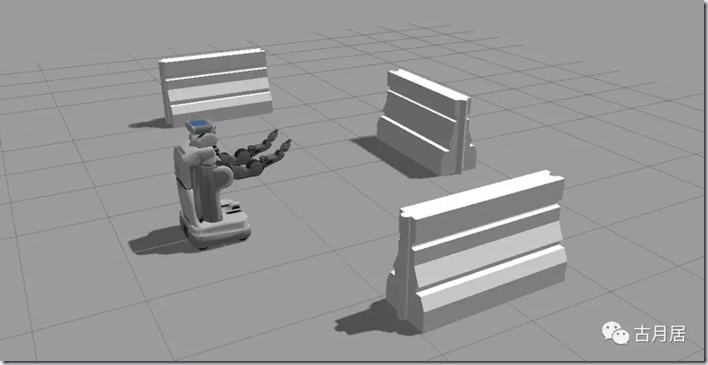
- 启动成功后,就可以在一个空旷的gazebo仿真环境中看到PR2机器人了。

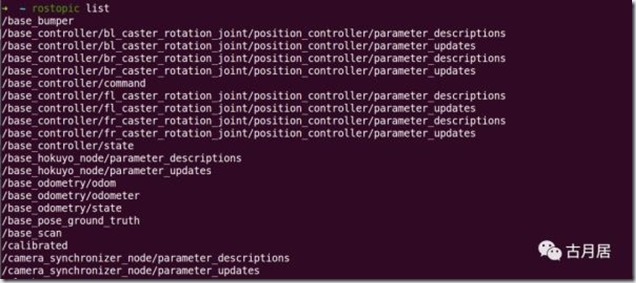
- 查看当前系统中的话题列表,会看到众多话题已经发布或者等待订阅,这就是PR2机器人仿真器提供给用户的接口,我们可以基于这些接口实现很多功能。
- 为了测试PR2的传感器是否启动成功,可以在仿真环境中随机添加一些外部物体。
- 然后打开rviz,添加点云、激光、摄像头等插件,实现传感器数据的可视化显示。

- 目前PR2机器人还处于静止状态,可以运行键盘控制节点,控制PR2运动:
$ roslaunch pr2_teleop teleop_keyboard.launch
- 启动后根据终端中的提示,使用键盘控制PR2机器人在gazebo中移动,同时rviz中的PR2模型也会同步更新。
在控制PR2移动时,rviz中的Fixed Frame需要修改为odom_combined
三、 使用PR2实现SLAM
在PR2仿真环境中,我们已经获取到所有传感器的数据,并且可以控制PR2移动,接下来尝试使用PR2实现SLAM。
第一步还是启动PR2的gazebo仿真环境:
$ roslaunchpr2_gazebo pr2_empty_world.launch
- 然后在空旷的gazebo仿真环境中添加一些障碍物体。
- 这里以gmapping为例,创建一个启动gmapping节点的启动文件pr2_build_map.launch:
<launch>
<node name="gmapping_node"pkg="gmapping"type="slam_gmapping" respawn="false" >
<remap to="base_scan" from="scan"/>
<paramname="odom_frame" value="odom_combined" />
</node>
</launch>
- 然后在该文件所在的路径下直接运行以下命令:
$ roslaunch pr2_build_map.launch
如果launch文件、节点、可执行文件等在终端的当前路径下,运行命令时可以不加功能包名。
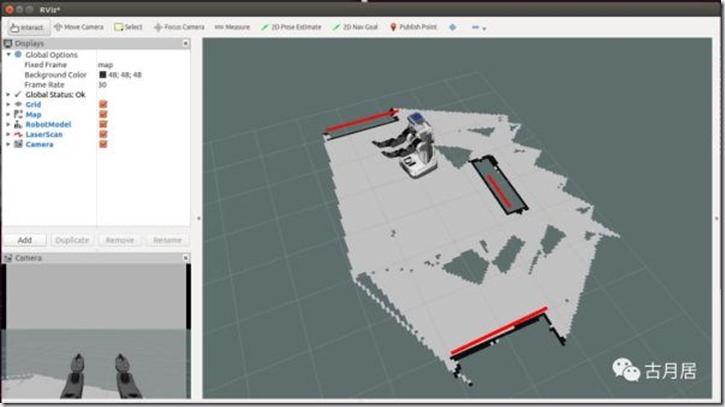
启动成功后,gmapping节点就开始SLAM建图了。启动rviz并添加显示插件后,可以看到如图所示的SLAM效果。
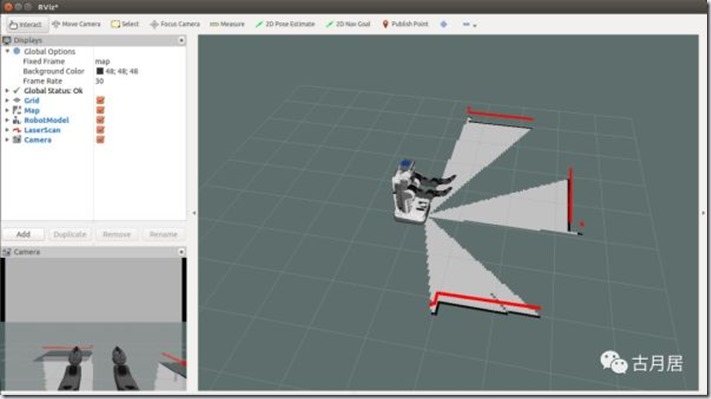
- 启动键盘控制节点,控制PR2机器人在仿真环境中围绕障碍物体移动,就可以实现SLAM了。
$ roslaunch pr2_teleop teleop_keyboard.launch
四、 PR2机械臂的使用
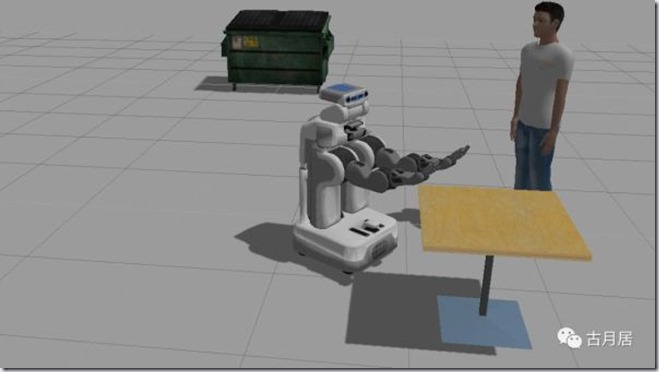
- PR2不仅是一个移动机器人平台,它还装配了两个机械手,可以实现很多复杂的机械臂操作。类似于键盘发布速度控制指令,我们也可以在终端中使用如下命令控制PR2的两个机械臂:
$ roslaunch pr2_gazebo pr2_empty_world.launch
$ roslaunch pr2_teleop_general pr2_teleop_general_keyboard.launch
- 启动成功后,可以在终端中看到提示信息,分别控制PR2的头部、身体、机械臂等多个可运动部位。

- 此处选择控制机械臂,然后会看到一系列控制命令。
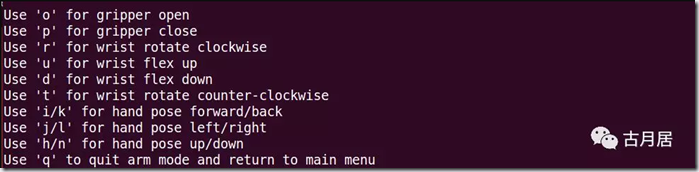
- 按照命令提示点击键盘按键,就可以控制PR2机器人的两个手臂运动了。
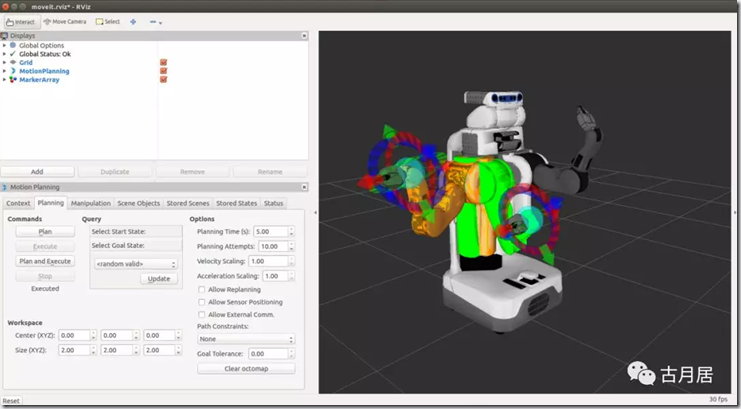
- 说到机械臂运动,就不得不提到MoveIt!,PR2机器人的机械臂也可以通过MoveIt!控制。在安装完成的PR2功能包中,已经包含了PR2手臂的MoveIt!配置功能包,可以直接启动demo示例:
$ roslaunch pr2_moveit_config demo.launch
- 在启动的rviz中会看moveit的界面,可以通过MoveIt!插件或代码控制机械手臂运动。
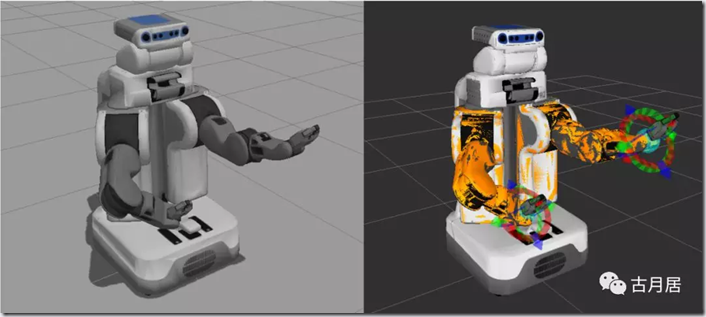
- 除此之外,我们也可以使用如下命令,通过MoveIt!控制gazebo仿真器中的PR2:
$ roslaunch pr2_gazebopr2_empty_world.launch
$ roslaunch pr2_moveit_config move_group.launch
$ roslaunch pr2_moveit_config moveit_rviz.launch
各种控制器插件在这里都已经配置完成,有兴趣的读者可以详细学习PR2功能包中的源码,这些都是我们实践过程中重要的参考资料。
再次在rviz中控制PR2的机械手臂运动,gazebo中PR2的手臂将根据规划的轨迹完成运动。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号