



















ROS2入门教程-windows安装ROS2
ROS2入门教程-windows安装ROS2
说明:
- 介绍怎么在Windows系统下安装ROS2
系统要求
建议使用win 10系统
安装ROS2的前提准备
1.安装Chocolatey
Chocolatey的相关下载链接:https://chocolatey.org/
2.通过 Chocolatey 安装 Python
打开命令提示符, 然后键入下面的命令:
choco install -y python
3.安装 OpenSSL
从下面提供的链接下载 OpenSSL 安装程序。请下载 Win64 OpenSSL v1.0.2,不要下载 Win32或者 Light 版本。
OpenSSL的相关链接:https://slproweb.com/products/Win32OpenSSL.html
使用默认参数运行安装程序。 然后, 定义环境变量(下面的命令假定使用了默认安装目录) :
setx -m OPENSSL_CONF C:\OpenSSL-Win64\bin\openssl.cfg
#Add C:\OpenSSL-Win64\bin\ to your PATH
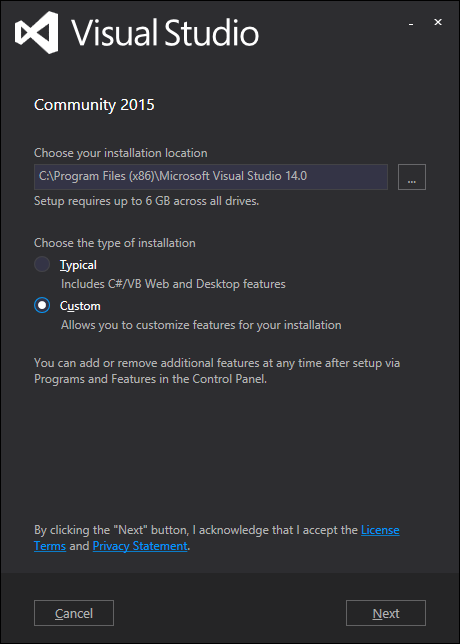
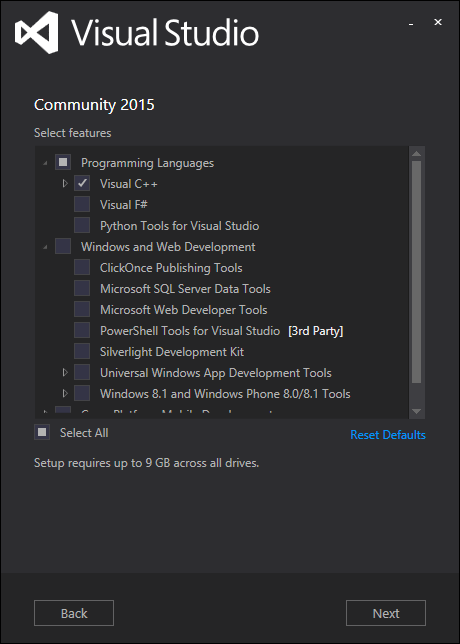
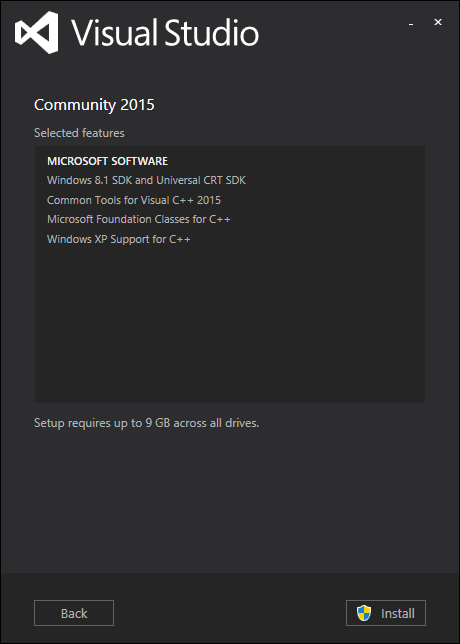
4.安装Visual Studio Community 2015
Visual Studio Community 2015的相关下载链接:https://www.visualstudio.com/vs/older-downloads/
确保安装到所需的功能。
5.安装DDS Vendor
二进制软件包将eProsima FastRTPS和Adlink OpenSplice作为中间件整合在一起。 要使用其他DDSvendor,则需要从源代码开始构建。
eProsima FastRTPS & Boost (only for beta-1 and older releases)
Adlink OpenSplice
如果想要使用 OpenSplice, 你需要下载最新版本(最低要求版本为6.7.170912)
OpenSplice的相关下载链接:https://github.com/ADLINK-IST/opensplice/releases/tag/OSPL_V6_7_171127OSS_RELEASE
6.安装 OpenCV
OpenCV的相关下载链接:https://github.com/ros2/ros2/releases/download/release-beta2/opencv-2.4.13.2-vc14.VS2015.zip
PATH 环境变量设置:
c:\dev\opencv-2.4.13.2-vc14.VS2015\x64\vc14\bin
7.安装依赖项
请从这个 GitHub 存储库下载这些软件包。
asio.1.10.6.nupkg
eigen-3.3.3.nupkg
tinyxml-usestl.2.6.2.nupkg
tinyxml2.4.1.0.nupkg
下载完成后,执行以下命令:
choco install -y -s <PATH\TO\DOWNLOADS\> asio eigen tinyxml-usestl tinyxml2
# <PATH\TO\DOWNLOADS>为已下载软件包的文件夹的对应路径
- You must also install
pipand one python package,yaml:
python -m pip install -U pyyaml setuptools
下载ROS2
ROS2的相关下载链接:https://github.com/ros2/ros2/releases
Download the latest package for Windows, e.g.,
ros2-package-windows-AMD64.zip.- Note: there may be more than one binary download option which might cause the file name to differ.
Unpack the zip file somewhere (we'll assume
C:\dev\ros2).
设置 ROS2 的环境
- 执行以下命令以及source RO2 的配置文件来设置工作空间
call C:\dev\ros2\local_setup.bat
- If you downloaded a release with OpenSplice support and want to use it as a middleware you must additionally source the OpenSplice setup file. Only do this
afteryou have sourced the ROS 2 one:
call "C:\opensplice67\HDE\x86_64.win64\release.bat"
Try some examples
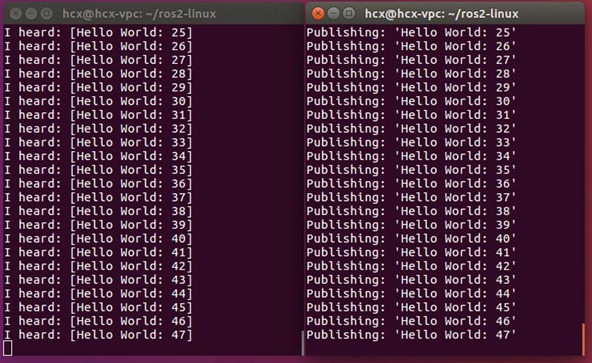
- 打开一个终端,执行以下命令:
ros2 run demo_nodes_cpp talker
- 打开一个新终端,执行以下命令:
ros2 run demo_nodes_py listener
- 运行结果图如下:
排除故障
如果不能运行例子且出现缺少dll的报错,请检查前面安装的外部依赖的所有的库, 例如:OpenCV的
PATH环境变量是否设置正确如果在前面设置时忘记执行
call C:\dev\ros2\local_setup.bat命令,则可能无法运行demo
参考链接
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号