



















ROS与RACECAR教程-Razor IMU安装
ROS与RACECAR教程-Razor IMU安装
说明:
- 介绍如何安装Razor IMU
Razor IMU:
- 9DOF Razor IMU包含三个传感器:ITG-3200(MEMS三轴陀螺仪),ADXL345(三轴加速度计)和HMC5883L(三轴磁力仪)
- 提供9自由度的惯性测量。
- 所有传感器的输出由板载ATmega328处理,并通过串行接口输出。
- 使得9DOF Razor IMU可以用作无人机,自主车辆和图像稳定系统的非常强大的控制机制。
- 该板有一个内置的ATMega328。
- ATMega328可通过Arduino软件界面进行编程,提供与ROS包兼容的态度标题报告系统(AHRS)固件。
- ROS package ,http://wiki.ros.org/razor_imu_9dof
安装:
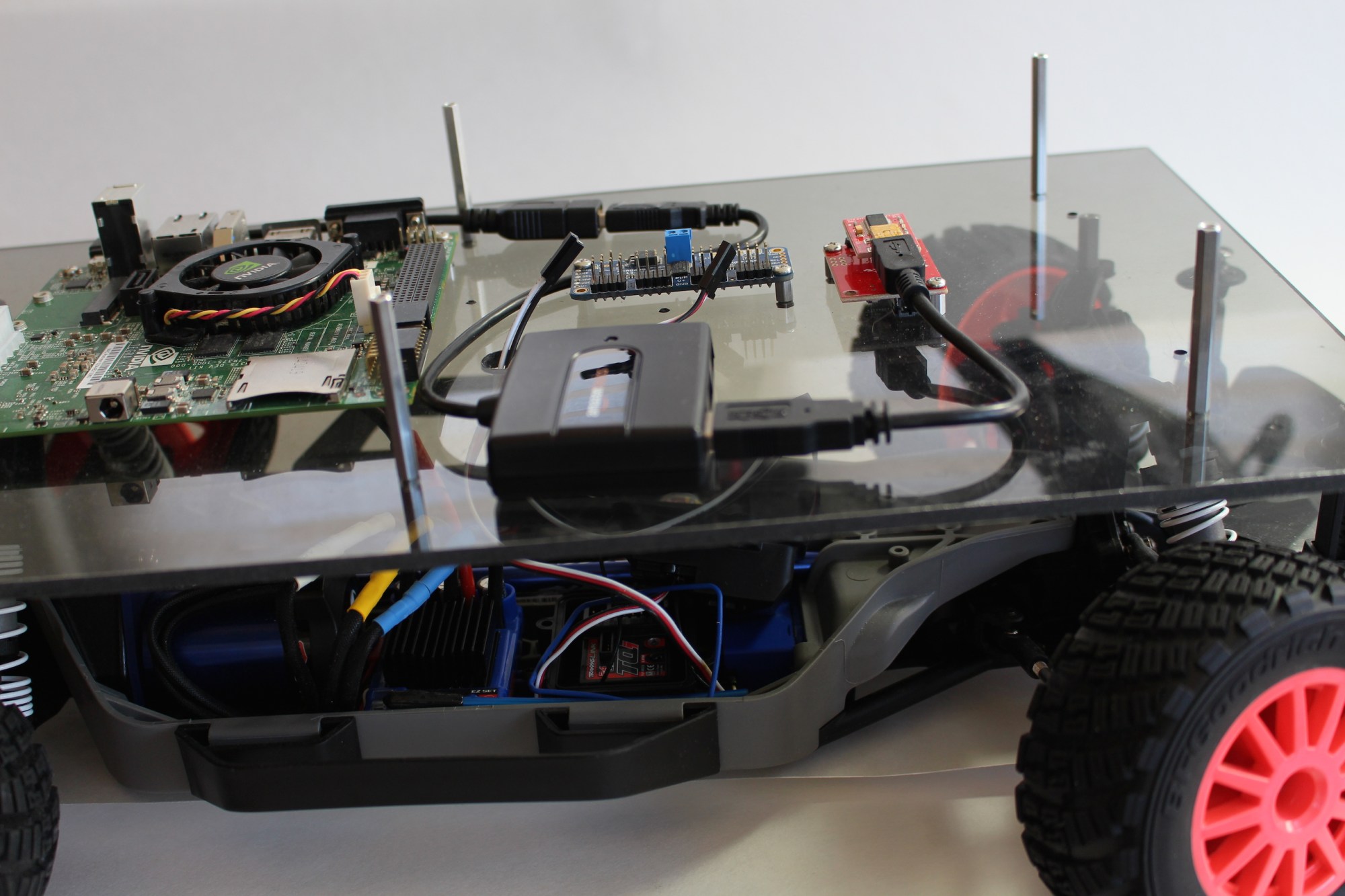
- 在Jetson RACECAR原型机上,在底部平台上钻了两个孔,以安装安装IMU的支座。
- 在下图中,USB 2.0集线器显示连接到Jetson和Razor IMU。
- 请注意,这只是一些考验,我们必须考虑如何在未来的一集中将汽车连接起来。
- 我目前的想法是在USB 2.0上运行控制系统,并在USB 3.0上运行传感器。
- MIT和UPenn小车都使用一个USB 3.0集线器,如果您正在使用尽可能多的传感器和设备,这似乎是一个合理的方法。
- 效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号