



















ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航
说明
- 介绍如何使用turtlebot通过rtabmap_ros进行建图和导航
安装相关包:
- Kinetic
$ sudo apt-get install ros-kinetic-turtlebot-bringup ros-kinetic-turtlebot-navigation ros-kinetic-rtabmap-ros
- Indigo
$ sudo apt-get install ros-indigo-turtlebot-bringup ros-indigo-turtlebot-navigation ros-indigo-rtabmap-ros
启动建图模式:
- 注意:命令都是在主机上运行,主从机笔者测试可以显示地图,但是不能显示点云图
- 启动底盘
$ roslaunch turtlebot_bringup minimal.launch
- 启动建图
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch
- 启动rviz:
$ roslaunch rtabmap_ros demo_turtlebot_rviz.launch
- 或者
$ rosrun rviz rviz -d turtlebot_navigation.rviz
- 效果如下:
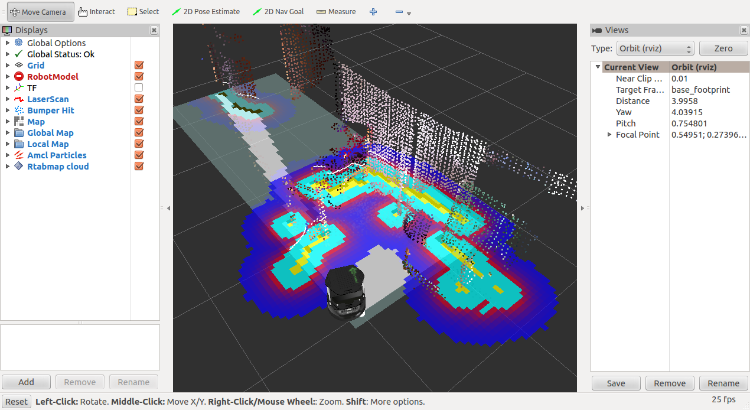
- 可以看到2D图和3D图,默认每次启动会使用相同的数据库,数据库都保存在
~/.ros/rtabmap.db - 如果是使用新的数据库可以用参数args:="--delete_db_on_start"
启动定位模式
- 上面建图模式,生成数据库之后
- 可执行如下的定位命令:
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch localization:=true
- 稍微移动机器人直到能在地图中重新定位,当检测到闭环2D图就是显示出来。
自主导航
- 当在建图或定位模式中完成地图,既可以进行自主导航了
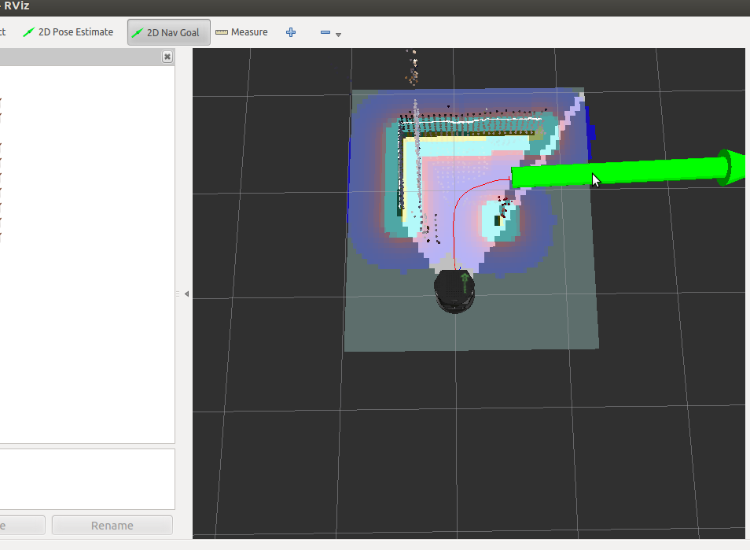
- 通过点击"2D Nav Goal"设置目标点,机器人即会自动规划路线到达目标点
- 效果图:
参考:
- http://official-rtab-map-forum.67519.x6.nabble.com/Demo-RTAB-Map-on-Turtlebot-td439.html
- http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号