



















ROS与VSLAM入门教程-rtabmap_ros-双目户外导航
ROS与VSLAM入门教程-rtabmap_ros-双目户外导航
说明:
- 介绍RTAB-Map如何实现双目户外导航
github:
2D Navigation/2D导航
- planner/规划器使用 move_base
- global costmap/全局代价地图通过"/map"(nav_msgs/OccupancyGrid)话题生成
- local costmap/本地代价地图通过"openni_points" (sensor_msgs/PointCloud2) 话题更新
- 一个配置好的例子az3_mapping_robot_stereo_nav.launch. 参考github
- Planner代码如下:
<group ns="planner">
<remap from="openni_points" to="/planner_cloud"/>
<remap from="map" to="/rtabmap/proj_map"/>
<remap from="move_base_simple/goal" to="/planner_goal"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="local_costmap_params.yaml" command="load" />
<rosparam file="global_costmap_params.yaml" command="load" />
<rosparam file="base_local_planner_params.yaml" command="load" />
</node>
</group>
- costmap_common_params.yaml代码如下:
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[ 0.3, 0.3], [-0.3, 0.3], [-0.3, -0.3], [ 0.3, -0.3]]
footprint_padding: 0.03
#robot_radius: ir_of_robot
inflation_radius: 0.55
transform_tolerance: 1
controller_patience: 2.0
NavfnROS:
allow_unknown: true
recovery_behaviors: [
{name: conservative_clear, type: clear_costmap_recovery/ClearCostmapRecovery},
{name: aggressive_clear, type: clear_costmap_recovery/ClearCostmapRecovery}
]
conservative_clear:
reset_distance: 3.00
aggressive_clear:
reset_distance: 1.84
- global_costmap_params.yaml代码如下:
global_costmap:
global_frame: map
robot_base_frame: base_footprint
update_frequency: 0.5
publish_frequency: 0.5
static_map: true
- local_costmap_params.yaml代码如下:
local_costmap:
global_frame: odom
robot_base_frame: base_footprint
update_frequency: 2.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 4.0
height: 4.0
resolution: 0.025
origin_x: -2.0
origin_y: -2.0
observation_sources: point_cloud_sensor
# assuming receiving a cloud from rtabmap_ros/obstacles_detection node
point_cloud_sensor: {
sensor_frame: base_footprint,
data_type: PointCloud2,
topic: openni_points,
expected_update_rate: 0.5,
marking: true,
clearing: true,
min_obstacle_height: -99999.0,
max_obstacle_height: 99999.0}
- base_local_planner_params.yaml代码如下:
TrajectoryPlannerROS:
# Current limits based on AZ3 standalone configuration.
acc_lim_x: 0.75
acc_lim_y: 0.75
acc_lim_theta: 4.00
max_vel_x: 0.500
min_vel_x: 0.212
max_rotational_vel: 0.550
min_in_place_rotational_vel: 0.15
escape_vel: -0.10
holonomic_robot: false
xy_goal_tolerance: 0.20
yaw_goal_tolerance: 0.20
sim_time: 1.7
sim_granularity: 0.025
vx_samples: 3
vtheta_samples: 3
vtheta_samples: 20
goal_distance_bias: 0.8
path_distance_bias: 0.6
occdist_scale: 0.01
heading_lookahead: 0.325
dwa: true
oscillation_reset_dist: 0.05
meter_scoring: true
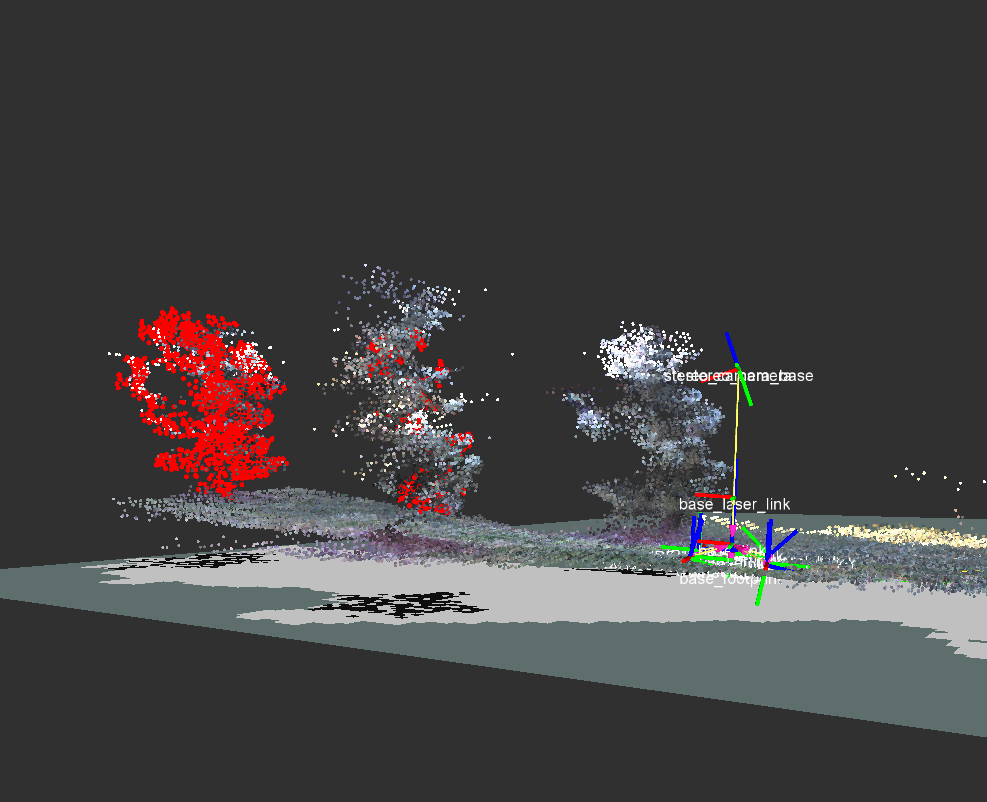
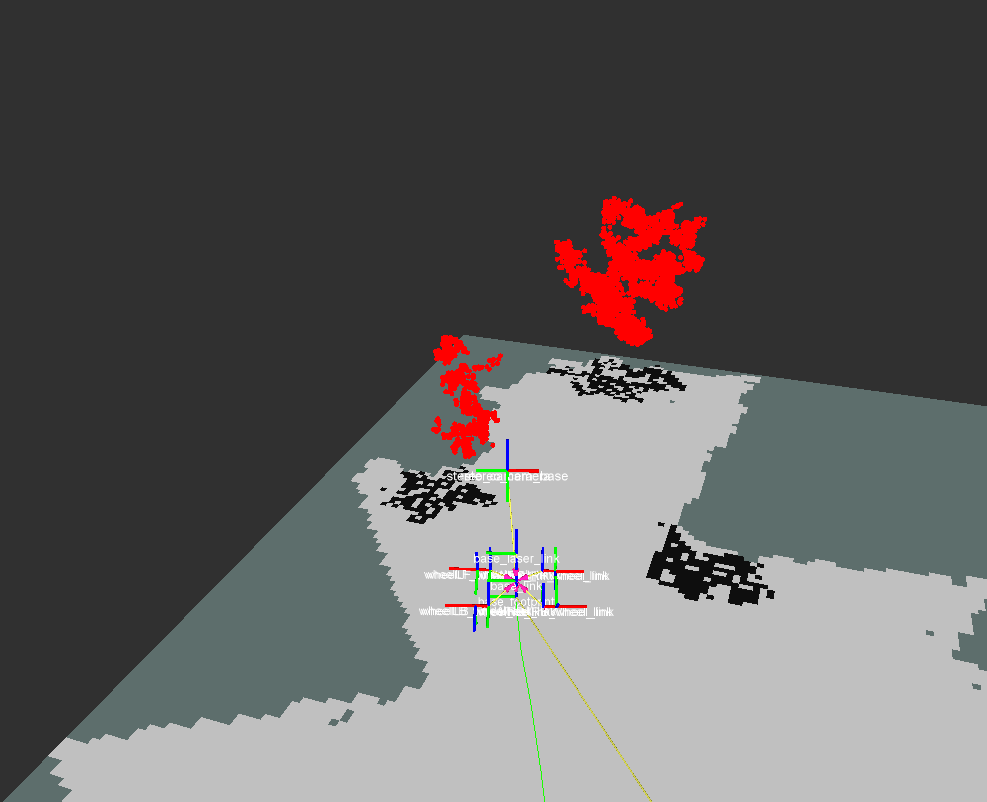
Global costmap
- rtabmap节点通过3D点云图在地面的投影来生成2D栅栏图(名为"/rtabmap/proj_map"话题)
- 通过在xy平面上投影地面来填充空的单元格。通过在xy平面上投影障碍物来填充占用的单元格。
- 由于地面不均匀,地面通过正常滤波分割:所有在+ z方向(+-固定角度)正常的点都被标记为地面,所有其他标记为障碍物。
- 图例:


- 使用全局地图/map,需要映射话题
<remap from="map" to="/rtabmap/proj_map"/>
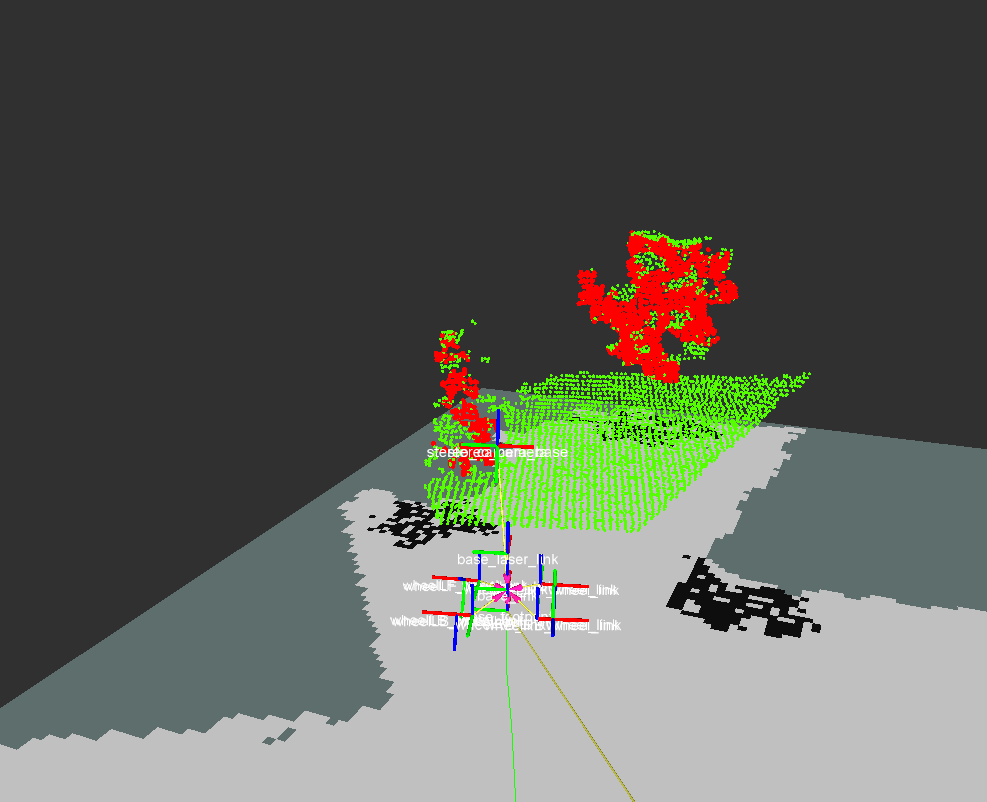
Local costmap/本地代码地图
- 对于本地代码地图更新,我们只提供障碍物的点云
- 使用rtabmap_ros/obstacles_detection nodelet节点,该节点使用与全局成本图相同的地面/障碍物分割方法。
- 在local_costmap_params.yaml中,因为机器人可以与其odom/map参考的可以是任何高度,我们将min_obstacle_height和max_obstacle_height设置为高值(-99999 and 99999).
- 用于分割的点云是使用rtabmap_ros/point_cloud_xyz的nodelet节点从stereo_image_proc的差异图像生成的。
- rtabmap_ros/point_cloud_xyz代码如下:
<group ns="/stereo_camera" >
<!-- Generate a point cloud from the disparity image -->
<node pkg="nodelet" type="nodelet" name="disparity2cloud" args="load rtabmap_ros/point_cloud_xyz stereo_nodelet">
<remap from="disparity/image" to="disparity"/>
<remap from="disparity/camera_info" to="right/camera_info_throttle"/>
<remap from="cloud" to="cloudXYZ"/>
<param name="voxel_size" type="double" value="0.05"/>
<param name="decimation" type="int" value="4"/>
<param name="max_depth" type="double" value="4"/>
</node>
<!-- Create point cloud for the local planner -->
<node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection stereo_nodelet">
<remap from="cloud" to="cloudXYZ"/>
<remap from="obstacles" to="/planner_cloud"/>
<param name="frame_id" type="string" value="base_footprint"/>
<param name="map_frame_id" type="string" value="map"/>
<param name="min_cluster_size" type="int" value="20"/>
<param name="max_obstacles_height" type="double" value="0.0"/>
</node>
</group>
参考:
- http://wiki.ros.org/rtabmap_ros/Tutorials/StereoOutdoorNavigation
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号