



















ROS与VSLAM入门教程-rtabmap_ros-远程建图
ROS与VSLAM入门教程-rtabmap_ros-远程建图
说明:
- 介绍如何在远程完成建图
Robot端设置:
- 设置IP地址:
$ ifconfig
eth0 Link encap:Ethernet HWaddr ##:##:##:##:##:##
inet addr:192.168.1.3 Bcast:192.168.1.255 Mask:255.255.255.0
...
$ export ROS_IP=192.168.1.3
- 新建launch文件,
vim freenect_throttle.launch,使用rtabmap_ros/data_throttle nodelet,并设置频率为5hz - 代码如下:
<launch>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="True" />
</include>
<arg name="rate" default="5"/>
<arg name="decimation" default="1"/> <!-- Reduce the image size, e.g., 2 means "width/2 x height/2". -->
<arg name="approx_sync" default="true" />
<!-- Use same nodelet used by Freenect/OpenNI -->
<group ns="camera">
<node pkg="nodelet" type="nodelet" name="data_throttle" args="load rtabmap_ros/data_throttle camera_nodelet_manager" output="screen">
<param name="rate" type="double" value="$(arg rate)"/>
<param name="decimation" type="int" value="$(arg decimation)"/>
<param name="approx_sync" type="bool" value="$(arg approx_sync)"/>
<remap from="rgb/image_in" to="rgb/image_rect_color"/>
<remap from="depth/image_in" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info_in" to="rgb/camera_info"/>
<remap from="rgb/image_out" to="data_throttled_image"/>
<remap from="depth/image_out" to="data_throttled_image_depth"/>
<remap from="rgb/camera_info_out" to="data_throttled_camera_info"/>
</node>
</group>
</launch>
- 启动launch文件
$ roslaunch freenect_throttle.launch rate:=5
远程电脑:
- 设置网络
$ ifconfig
eth0 Link encap:Ethernet HWaddr ##:##:##:##:##:##
inet addr:192.168.1.2 Bcast:192.168.1.255 Mask:255.255.255.0
...
$ export ROS_IP=192.168.1.2
- 设置master
$ export ROS_MASTER_URI=http://192.168.1.3:11311
- 启动rtabmap.launch
$ roslaunch rtabmap_ros rtabmap.launch rgb_topic:=/camera/data_throttled_image depth_topic:=/camera/data_throttled_image_depth camera_info_topic:=/camera/data_throttled_camera_info compressed:=true rtabmap_args:="--delete_db_on_start"
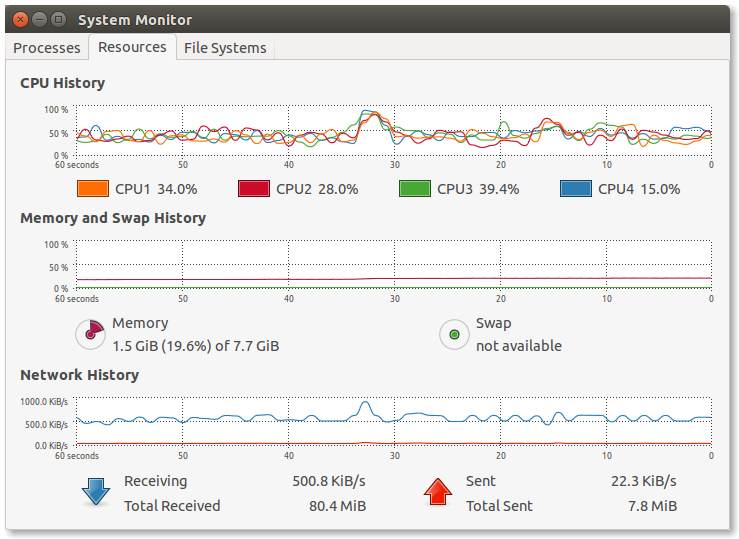
在rtabmapviz下进行建图
观察带宽,约使用~500 KiB/s,在Ubuntu,如下:
高级设置:
- 使用额外里程计,设置参数
visual_odometry:=false and odom_topic:="/odom" - 对于深度图, 如果设置参数compressed:=true,image_transport处理就会使用compressedDepth话题
- 对于RGB图,image_transport处理就会使用compressed话题
- 设置参数rgb_image_transport:=theora,可以改变类型为theora
- 可以手工启动rviz或设置rviz:=true来启动
- 不希望使用rtabmapviz,可以通过设置参数rtabmapviz:=false关闭
参考:
- http://wiki.ros.org/rtabmap_ros/Tutorials/RemoteMapping
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号