



















ROS探索总结-31.ros_control
ROS探索总结-31.ros_control
说明:
- 介绍ros_control框架和使用
ROS中提供了丰富的机器人应用:SLAM、导航、MoveIt......但是你可能一直有一个疑问,这些功能包到底应该怎么样用到我们的机器人上,也就是说在应用和实际机器人或者机器人仿真器之间,缺少一个连接两者的东西。
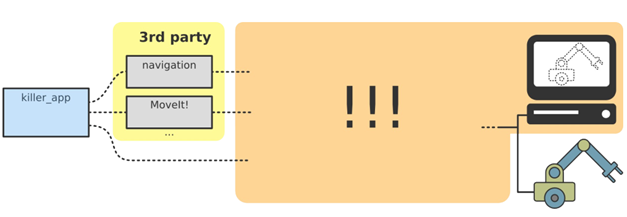
ros_control就是ROS为用户提供的应用与机器人之间的中间件,包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等,可以帮助机器人应用快速落地,提高开发效率。
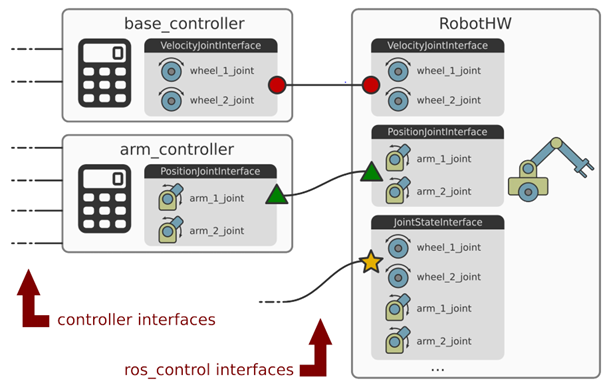
总体框架
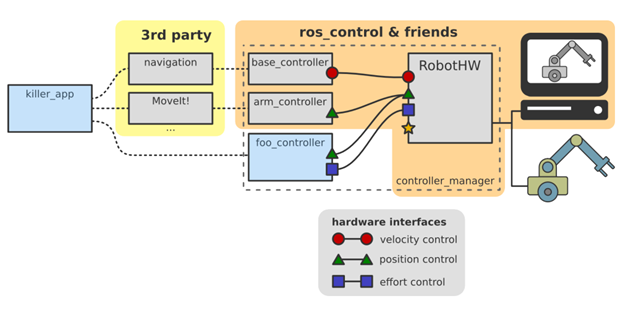
上图是ros_control的总体框架,可以看到正对不同类型的控制器(底盘、机械臂等),ros_control可以提供多种类型的控制器,但是这些控制器的接口各不相同,为了提高代码的复用率,ros_control还提供一个硬件的抽象层。
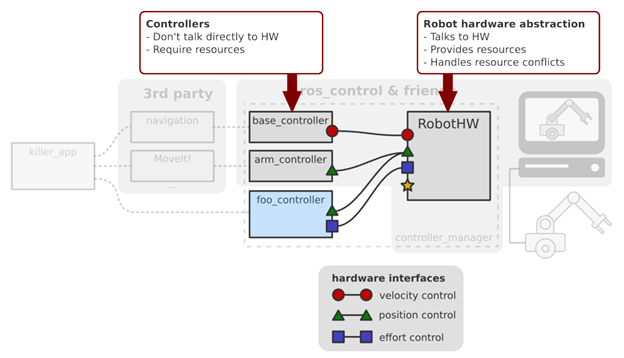
硬件抽象层负责机器人硬件资源的管理,而controller从抽象层请求资源即可,并不直接接触硬件。
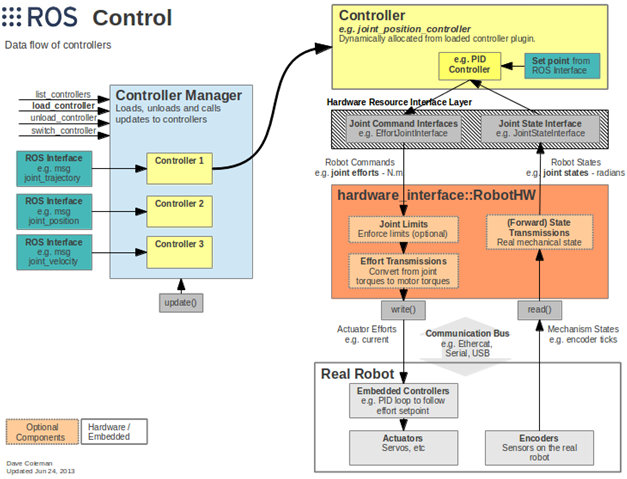
上图是ros_control的数据流图,可以更加清晰的看到每个层次包含的功能:
Controller Manager:每个机器人可能有多个controller,所以这里有一个控制器管理器的概念,提供一种通用的接口来管理不同的controller。controller manager的输入就是ROS上层应用的输出。
Controller:controller可以完成每个joint的控制,请求下层的硬件资源,并且提供了PID控制器,读取硬件资源接口中的状态,在发布控制命令。
Hardware Rescource:为上下两层提供硬件资源的接口。
RobotHW:硬件抽象层和硬件直接打交道,通过write和read方法来完成硬件的操作,这一层也包含关节限位、力矩转换、状态转换等功能。
Real Robot:实际的机器人上也需要有自己的嵌入式控制器,接收到命令后需要反映到执行器上,比如接收到位置1的命令后,那就需要让执行器快速、稳定的到达位置1。
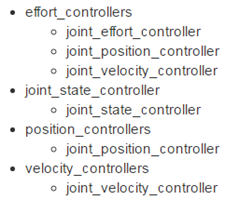
Controllers
ros_controllers这个功能包提供了已有的一些controllers:
当然,我们也可以根据自己的需求,创建需要的controller,然后通过controller来管理自己创建的controller,可以参考https://github.com/ros-controls/ros_control/wiki/controller_interface
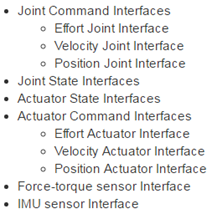
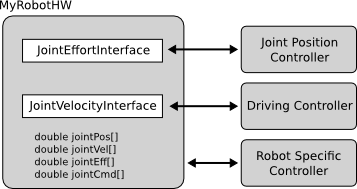
Hardware Interface
Hardware Interface是controller和RobotHw沟通的接口,基本上和controllers的种类是对应的,同样可以自己创建需要的接口,可以参考:https://github.com/ros-controls/ros_control/wiki/hardware_interface
Transmissions
Transmissions就是机器人的传动系统,机器人每个需要运动的关节都需要配置相应的Transmission,可以通过代码完成https://github.com/ros-controls/ros_control/wiki/transmission_interface,但大部分情况下,都会在URDF文件中直接添加(http://ros.org/wiki/urdf/XML/Transmission):
<transmission name="simple_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="foo_joint">
<hardwareInterface>EffortJointInterface</hardwareInterface>
</joint>
<actuator name="foo_motor">
<mechanicalReduction>50</mechanicalReduction>
<hardwareInterface>EffortJointInterface</hardwareInterface>
</actuator>
</transmission>
Joint Limits
Joint Limits是硬件抽象层中的一块,维护一个关节限位的数据结构,这些限位数据可以从机器人的URDF文件中加载,也可以ROS的参数服务器上加载(先用YAML配置文件导入ROS parameter server),这些限位数据不仅包含关节速度、位置、加速度、加加速度、力矩等方面的限位,还包含安全作用的位置软限位、速度边界(k_v)和位置边界(k_p)等等。
我们来看一个URDF中设置Joint Limits的例子:
<joint name="$foo_joint" type="revolute">
<!-- other joint description elements -->
<!-- Joint limits -->
<limit lower="0.0"
upper="1.0"
effort="10.0"
velocity="5.0" />
<!-- Soft limits -->
<safety_controller k_position="100"
k_velocity="10"
soft_lower_limit="0.1"
soft_upper_limit="0.9" />
</joint>
还有一些参数需要通过YAML配置文件先加载到参数服务器中,YAML文件的格式如下:
joint_limits:
foo_joint:
has_position_limits: true
min_position: 0.0
max_position: 1.0
has_velocity_limits: true
max_velocity: 2.0
has_acceleration_limits: true
max_acceleration: 5.0
has_jerk_limits: true
max_jerk: 100.0
has_effort_limits: true
max_effort: 5.0
bar_joint:
has_position_limits: false # Continuous joint
has_velocity_limits: true
max_velocity: 4.0
另外,我们还可以在代码中使用joint_limits_interface来加载和设置关节的限位参数,可以参考: joint_limits_interface
controller manager
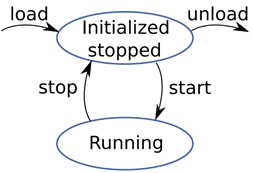
controller manager提供了一种多controller控制的机制,可以加载、开始运行、停止运行、卸载不同的controller,并且提供了多种工具来完成这些操作。
- 命令行工具
命令行的格式为:
$ rosrun controller_manager controller_manager <command> <controller_name>
支持的 <command> :
- load: load a controller (construct and initialize)
- unload: unload a controller (destruct)
- start: start a controller
- stop: stop a controller
- spawn: load and start a controller
- kill: stop and unload a controller
如果想要查看某个controller的状态,可以使用下边的命令:
$ rosrun controller_manager controller_manager <command>
支持的<command> :
- list: list all the controllers in the order they are executed, and give the state of each controller
- list-types: list all the controller types the controller manager knows about. If your controller is not in this list, you won't be able to spawn it.
- reload-libraries: Reloads all the controller libraries that are available as plugins. This is convenient when you are developing a controller and you want to test your new controller code, without restarting the robot every time. This does not restart controllers which were running before.
- reload-libraries --restore: Reloads all the controller libraries that are available as plugins and restores all controllers to their original state.
但是很多时候我们需要控制的controller有很多,比如六轴机器人,至少有六个controller,这时也可以使用“spawner ”这个命令来一次控制多个controller:
$ rosrun controller_manager spawner [--stopped] name1 name2 name3
上边的命令可以自动加载、启动controller,如果加上--stopped参数,那么contrller则只会被加载,但是并不会开始运行。如果想要停止一系列controller,但是不需要卸载,还需要运行的话,可以使用下边的命令:
$ rosrun controller_manager unspawner name1 name2 name3
- launch工具
在launch文件中,同样可以通过运行controller_manager包的命令,来加载和启动一系列controller:
<launch>
<node pkg="controller_manager"
type="spawner"
args="controller_name1 controller_name2" />
</launch>
上边的launch文件会加载并启动controllers,如果只需要加载:
<launch>
<node pkg="controller_manager"
type="spawner"
args="--stopped controller_name1 controller_name2" />
</launch>
- 可视化工具rqt_controller_manager
controller_manager还提供了可视化工具rqt_controller_manager,安装rosrun rqt_controller_manager rqt_controller_manager,直接使用下边的命令打开:
$ rosrun rqt_controller_manager rqt_controller_manager
不过目前在indigo ros版本里面,这个工具貌似有问题,找不到executable。
案例分析
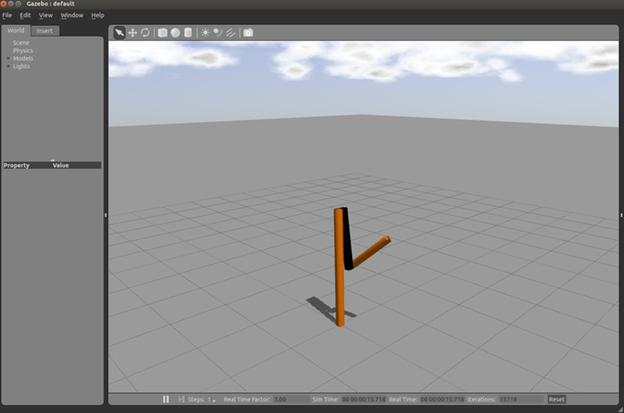
gazebo的tutorials里边提供了gazebo_ros_control的教程,用到一个两个关节的机械臂作为案例,我们就来分析一下这个案例中都是怎样落实上边这些概念的。源码可以在这里找到。
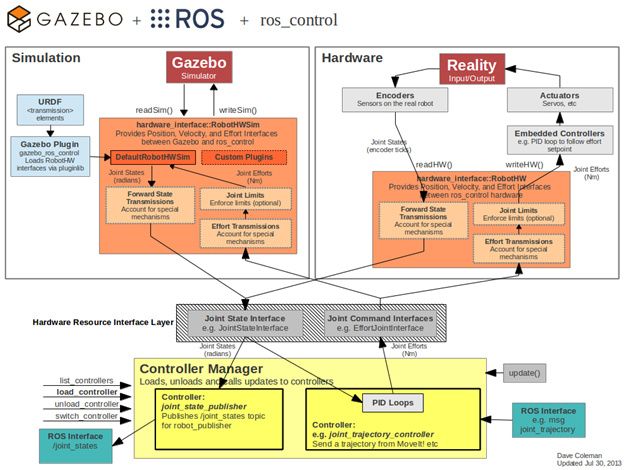
首先来看一张gazebo结合ros_control的架构图,其实和上边的数据流图差别不大。
- Transmissions
rrbot有两个关节,每个关节都有一个传动装置,所以应该有两个Transmissions,在rrbot的URDF文件rrbot.xacro文件中,我们可以找到这两个Transmissions:
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint1">
<hardwareInterface>EffortJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<hardwareInterface>EffortJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="tran2">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint2">
<hardwareInterface>EffortJointInterface</hardwareInterface>
</joint>
<actuator name="motor2">
<hardwareInterface>EffortJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
同时,为了让Gazebo可以识别
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/rrbot</robotNamespace>
</plugin>
</gazebo>
- controller和controller_manager
首先通过一个YAML文件rrbot_control.yaml来声明我们所需要的controller,以及对应的参数:
rrbot:
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
# Position Controllers ---------------------------------------
joint1_position_controller:
type: effort_controllers/JointPositionController
joint: joint1
pid: {p: 100.0, i: 0.01, d: 10.0}
joint2_position_controller:
type: effort_controllers/JointPositionController
joint: joint2
pid: {p: 100.0, i: 0.01, d: 10.0}
其中还需要包含一个joint_state_controller,来控制发布每个关节的实时状态。
然后使用launch文件rrbot_control.launch,运行controller_manager中的spawner,加载并运行这些上边这些controller:
<launch>
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find rrbot_control)/config/rrbot_control.yaml" command="load"/>
<!-- load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" ns="/rrbot" args="joint1_position_controller joint2_position_controller joint_state_controller"/>
<!-- convert joint states to TF transforms for rviz, etc -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"
respawn="false" output="screen">
<remap from="/joint_states" to="/rrbot/joint_states" />
</node>
</launch>
这个例程没有涉及到Joint Limits。通过下边命令就可以在gazebo中启动rrbot并且开始控制:
$ roslaunch rrbot_gazebo rrbot_world.launch
$ roslaunch rrbot_control rrbot_control.launch
也可以手动调用完成controller的加载:
$ rosservice call /rrbot/controller_manager/load_controller "name: 'joint1_position_controller'"
$ rosservice call /rrbot/controller_manager/load_controller "name: 'joint2_position_controller'"
启动controller:
$ rosservice call /rrbot/controller_manager/switch_controller "{start_controllers: ['joint1_position_controller','joint2_position_controller'], stop_controllers: [], strictness: 2}"
停止controller:
$ rosservice call /rrbot/controller_manager/switch_controller "{start_controllers: [], stop_controllers: ['joint1_position_controller','joint2_position_controller'], strictness: 2}"
使用下边的命令就可以让机器人动起来:
$ rostopic pub -1 /rrbot/joint1_position_controller/command std_msgs/Float64 "data: 1.5"
$ rostopic pub -1 /rrbot/joint2_position_controller/command std_msgs/Float64 "data: 1.0"
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号