



















ROS与navigation教程-carrot_planner
ROS与navigation教程-carrot_planner
说明:
- 简单介绍nav-carrot_planner的概念和部分参数的含义。
代码库
概述
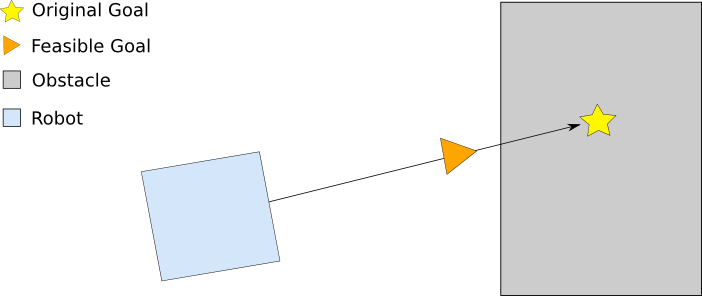
这个规划器试图找到适当的位置来使机器人跟随。
It does this by moving back along the vector between the robot and the goal point.
carrot_planner :: CarrotPlanner是一个简单的全局路径规划器,其继承里nav_core :: BaseGlobalPlanner接口,可以用作move_base节点的全局路径规划器的插件。
规划器获取用户指定的目标位置,检查用户指定的位置是否在障碍区中。
如果用户指定的位置在障碍区中,规划器就会在机器人与指定位置的已规划路径中寻找一个在障碍区外的可行的目标位置,然后再将此目标位置发送给局部规划器或者控制器。
carrot planner允许机器人机器人尽可能靠近用户指定的目标点。
CarrotPlanner
carrot_planner :: CarrotPlanner对象是通过ROS 的封装来实现的它的功能。
它在初始化时指定的ROS命名空间内运行。
carrot_planner :: CarrotPlanner对象的创建示例:
#include <tf/transform_listener.h>
#include <costmap_2d/costmap_2d_ros.h>
#include <carrot_planner/carrot_planner.h>
...
tf::TransformListener tf(ros::Duration(10));
costmap_2d::Costmap2DROS costmap("my_costmap", tf);
carrot_planner::CarrotPlanner cp;
cp.initialize("my_carrot_planner", &costmap);
( 1 ) API Stability
C++ API是稳定的。
ROS API也是稳定的。
( 2 ) ROS Parameters
~<name>/step_size (double, default: Resolution of the associated costmap)
- The size steps to take backward in meters along the vector between the robot and the user-specified goal point when attempting to find a valid goal for the local planner.
~<name>/min_dist_from_robot (double, default: 0.10)
- The minimum distance from the robot in meters at which a goal point will be sent to the local planner.
( 3 ) C++ API
- The C++ carrot_planner::CarrotPlanner class继承里nav_core ::
BaseGlobalPlanner接口,。(详细参阅:CarrotPlanner Documentation.)
参考资料
- http://wiki.ros.org/carrot_planner
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号