



















ROS与PhantomXArm教程-硬件清单
ROS与PhantomXArm教程-硬件清单
说明
- 介绍PhantomX-Arm相关硬件
产品图
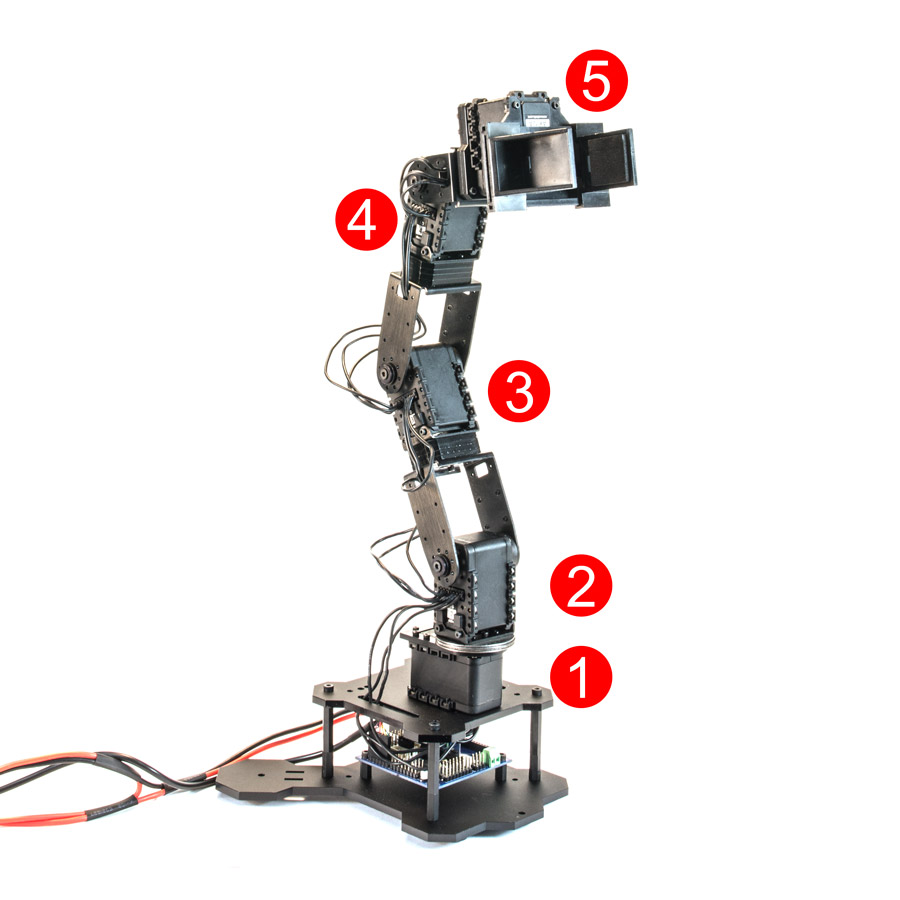
硬件清单:
- 5个 AX-12A Dynamixel 舵机
- PhantomX Pincher 支架套件
- 12v 5a 电源器
- FTDI 5v编程线
- ArbotiX Robocontroller 控制器
机械臂参数:
- 重量:550G
- 垂直长度:35CM
- 水平长度:31CM
- 力度:25CM/40G | 20CM/70G | 15CM/100G
- 抓力:500G
- 腕力:250G
AX-12A 参数:
- 品名:Dynamixel AX-12A
- 重量:54.6G
- 尺寸:32 x 50 x 40 mm
- 齿轮减速比:254:1
- 电压(v):12V
- 静止扭矩(N.m):1.5N.m(12.0V, 1.5A)
- 静止电流(A) 1.4
- 空载速度(RPM) 59rpm(12V)
- 电机: 有芯电机
- 最小控制角度:约0.29度 x 1,024
- 操作范围:舵机模式:300度 ,轮式模式:无限旋转
- 操作电压:9-12V(推荐11.1V)
- 操作温度:-5C - 70C
- 指令信号: 数据信号
- 通讯协议:半全工异步串口通讯(8bit,1stop,No Parity)
- 物理连接:TTL 多点总线(菊花链型连接)
- ID: 254 ID (0-253)
- 波特率:7343bps - 1Mbps
- 反馈功能:位置,温度,负载,输入电压,电流等
- 材质:外壳:工程塑料,齿轮:工厂塑料
- 位置传感器:电位器
- 默认ID:ID #1
ArbotiX-M 控制器:
- 16MHz AVR 控制芯片(ATMEGA644p)
- 2个串口,1个Bioloid舵机专用控制器,其他的为XBEE和FTDI编程接口
- 3个TTL DYNAMIXEL 3pin接口
- 28个数据 I/O,其中有8个可以作为模拟端口使用
- 28个I/O口都是舵机式控制管脚(GND、VCC、SIGNAL)
部分接线图

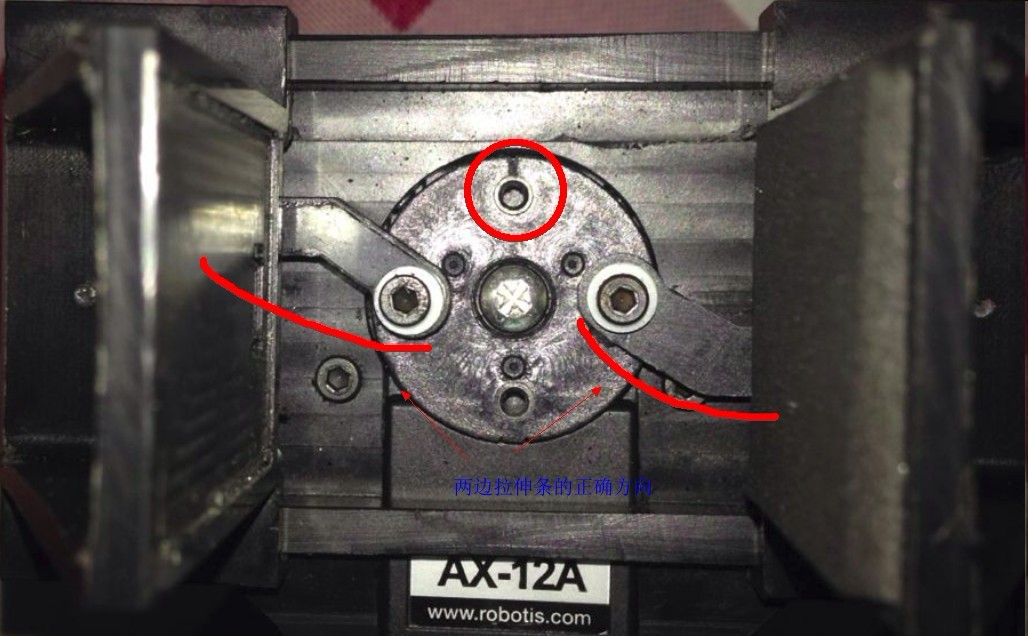
机械臂爪子安装
爪子安装时,要将爪子端的舵机标记符(如下图圆圈中所示)调到下图中相应的位置,再进行拉伸条的安装。
拉伸条的安装要注意其安装方向(正确方向如下图划线所示),安装方向错误会导致拉伸条在测试中断裂。
爪子正确安装效果图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号