



















Turtlebot3与仿真-多机建图
说明
- 在Gazebo仿真环境下使用tb3进行模拟多机建图
- 测试环境:Ubuntu 16.04 + ROS Kinetic
操作步骤
- 安装multirobot-map-merge包
$ sudo apt-get install ros-kinetic-multirobot-map-merge
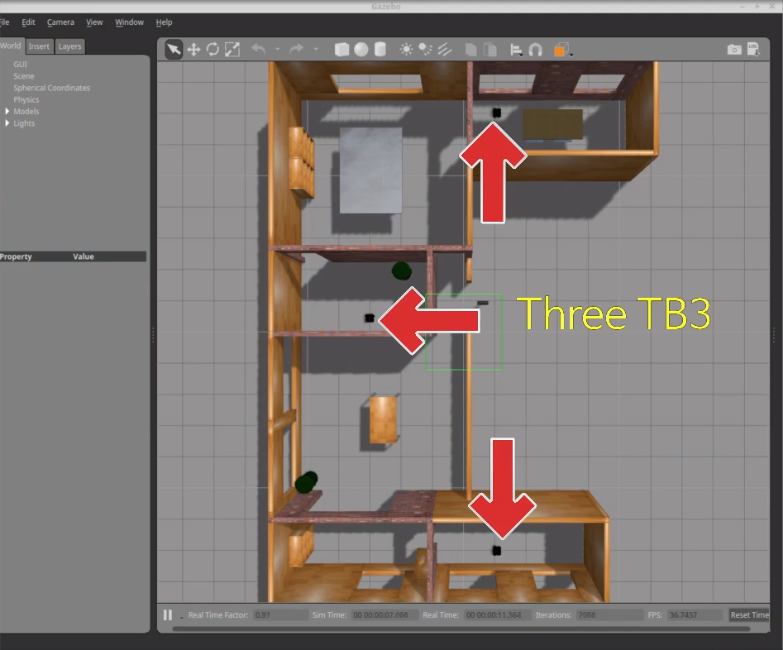
- 新终端,在Gazebo中的TurtleBot3 House环境加载三台tb3
$ roslaunch turtlebot3_gazebo multi_turtlebot3.launch
- 分别启动三个终端,启动SLAM建图程序
## 第一个终端
$ ROS_NAMESPACE=tb3_0 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_base_frame:=tb3_0/base_footprint set_odom_frame:=tb3_0/odom set_map_frame:=tb3_0/map
## 第二个终端
$ ROS_NAMESPACE=tb3_1 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_base_frame:=tb3_1/base_footprint set_odom_frame:=tb3_1/odom set_map_frame:=tb3_1/map
## 第三个终端
$ ROS_NAMESPACE=tb3_2 roslaunch turtlebot3_slam turtlebot3_gmapping.launch set_base_frame:=tb3_2/base_footprint set_odom_frame:=tb3_2/odom set_map_frame:=tb3_2/map
- 新终端,启动合并地图程序
$ roslaunch turtlebot3_gazebo multi_map_merge.launch
- 新终端,启动RViz
$ rosrun rviz rviz -d `rospack find turtlebot3_gazebo`/rviz/multi_turtlebot3_slam.rviz
- 分别启动三个终端,启动键盘控制程序
## 第一个终端
$ ROS_NAMESPACE=tb3_0 rosrun turtlebot3_teleop turtlebot3_teleop_key
## 第二个终端
$ ROS_NAMESPACE=tb3_1 rosrun turtlebot3_teleop turtlebot3_teleop_key
## 第三个终端
$ ROS_NAMESPACE=tb3_2 rosrun turtlebot3_teleop turtlebot3_teleop_key
- 分别移动三台tb3建图,建图完成后保持地图
$ rosrun map_server map_saver -f ~/map

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号