



















TK1入门教程硬件篇-连接Arduino
TK1入门教程硬件篇-连接Arduino
说明:
- 介绍如何使用TK1连接Arduino
FTDI内核模块:
- 连接Arduino的USB端口,使用FTDI serial-to-USB转换:
$ lsusb
Bus 002 Device 006: ID 0403:6001 Future Technology Devices International, Ltd FT232 USB-Serial (UART) IC
- 默认TK1不支持FTDI转换设备,检测是否支持:
$ zcat /proc/config.gz | grep FTDI
# CONFIG_USB_SERIAL_FTDI_SIO is not set
# CONFIG_USB_FTDI_ELAN is not set
编译FTDI kernel 模块:
(1)下载L4T内核源码:
- 内核地址:https://developer.nvidia.com/linux-tegra-rel-19,不同版本使用不同链接
- 下载后,放到TK1的~/kernel目录
- 解压:
tar xvjf kernel_src.tar.bz2
- 复制现有内核配置到新内核:
zcat /proc/config.gz > ~/kernel/.config
- 配置:
sudo apt-get install ncurses-bin libncurses5-dev
make menuconfig
- 找到Device Drivers -> USB Support -> USB Serial Converter Support
- 设置USB FTDI Single Port Serial Driver为M类型
- 验证:
$ cat .config | grep FTDI
CONFIG_USB_SERIAL_FTDI_SIO=m
# CONFIG_USB_FTDI_ELAN is not set
- 编译内核:
make prepare
make modules_prepare
make M=drivers/usb/serial/
Building modules, stage 2.
MODPOST 2 modules
CC drivers/usb/serial/baseband_usb_chr.mod.o
LD [M] drivers/usb/serial/baseband_usb_chr.ko
CC drivers/usb/serial/ftdi_sio.mod.o
LD [M] drivers/usb/serial/ftdi_sio.ko
- 安装模块:
sudo cp drivers/usb/serial/ftdi_sio.ko /lib/modules/$(uname -r)/kernel
sudo depmod -a
- 验证安装:
$ dmesg | grep usb
[ 57.385970] usb 2-1.5: new full-speed USB device number 5 using tegra-ehci
[ 57.407931] usb 2-1.5: New USB device found, idVendor=0403, idProduct=6001
[ 57.407950] usb 2-1.5: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[ 57.407964] usb 2-1.5: Product: FT232R USB UART
[ 57.407976] usb 2-1.5: Manufacturer: FTDI
[ 57.407987] usb 2-1.5: SerialNumber: A601NG2B
[ 57.479238] ftdi_sio: version magic '3.10.24 SMP preempt mod_unload ARMv7 p2v8 ' should be '3.10.24-gf455cd4 SMP preempt mod_unload ARMv7 p2v8 '
[ 57.504885] usbcore: registered new interface driver ftdi_sio
[ 57.507384] usbserial: USB Serial support registered for FTDI USB Serial Device
[ 57.508073] ftdi_sio 2-1.5:1.0: FTDI USB Serial Device converter detected
[ 57.508917] usb 2-1.5: Detected FT232RL
[ 57.508934] usb 2-1.5: Number of endpoints 2
[ 57.508948] usb 2-1.5: Endpoint 1 MaxPacketSize 64
[ 57.508960] usb 2-1.5: Endpoint 2 MaxPacketSize 64
[ 57.508971] usb 2-1.5: Setting MaxPacketSize 64
[ 57.511143] usb 2-1.5: FTDI USB Serial Device converter now attached to ttyUSB0
- FTDI分配到/dev/ttyUSB0
使用Arduino IDE
- 安装IDE:
sudo apt-get install arduino arduino-core
- 图示:
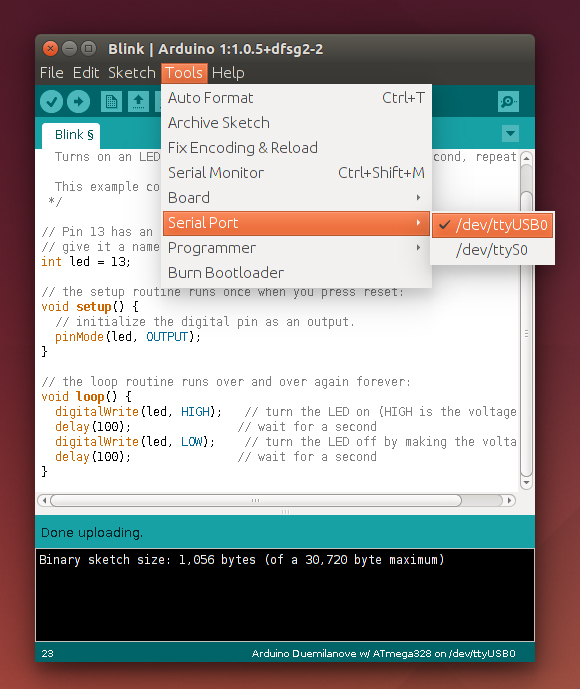
测试:
- 连上Arduino板子,打开IDE,选择对应的板子,及端口号
- 上传点亮程序到Arduino板子。
ROS与Arduino通信的实验:
- 运行命令:rosrun rosserial_python serial_node.py /dev/ttyACM0
- 出现错误:(Unable to sync with device; possible link problem or )
- 解决方法:在
#include <ros.h>前加入#define USE_USBCON - 原因:在“Arduinohardware.h”的第54行,做了判断。
- 我们可以自己根据硬件设备,指定对应的连接类型。
参考:
- http://blog.csdn.net/sinat_31135199/article/details/52691011?locationNum=10
- http://answers.ros.org/question/164191/rosserial-arduino-cant-connect-arduino-micro/
- http://www.elinux.org/Jetson/Tutorials/Communicate_To_Arduino
- http://www.elinux.org/Jetson/Tutorials/Program_An_Arduino
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号