



















Dashgo底盘入门教程-应用-AMCL自主导航
Dashgo底盘入门教程-应用-AMCL自主导航
说明:
- 介绍如何实现AMCL自主导航
- 先完成前一篇的gmapping地图构建
实现步骤:
- 运行如下命令,启动定位程序
$ roslaunch dashgo_nav amcl_demo.launch
$ rosrun dashgo_bringup teleop_twist_keyboard.py
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
- 注意: 在amcl_demo.launch需要修改地图名
- 在rviz的图形界面点击”2D Pose Estimate”,然后在地图中指定机器人的大致位置。
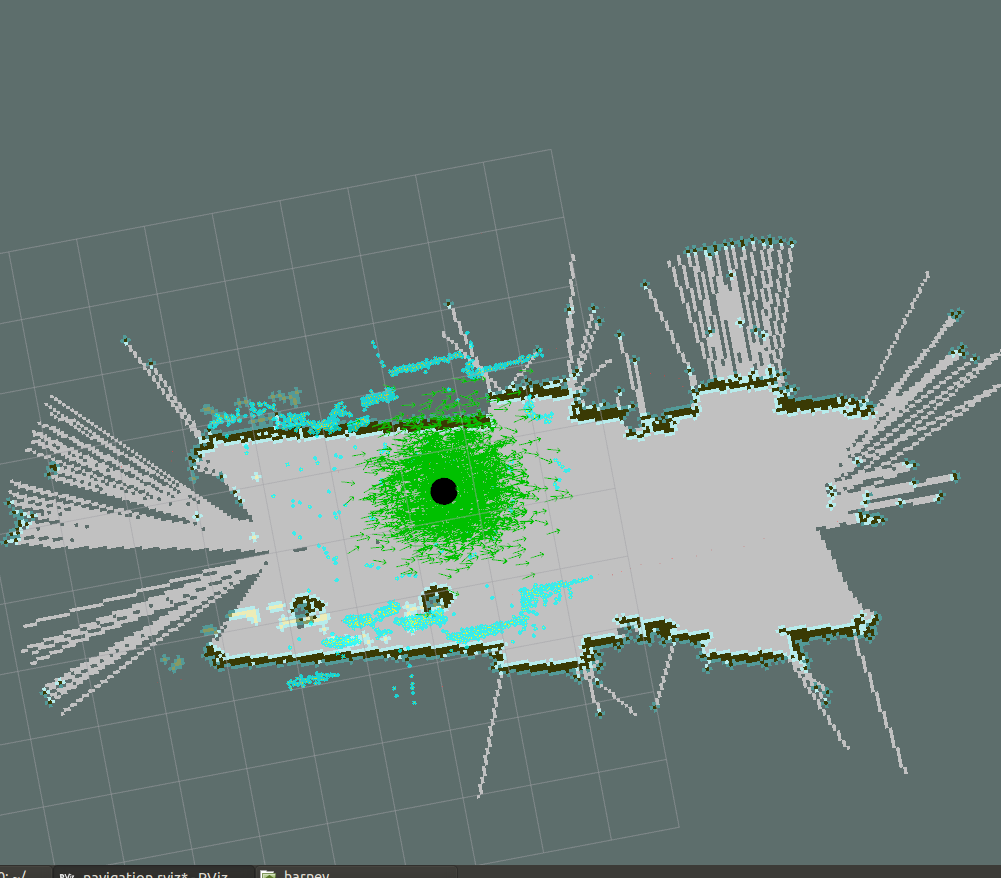
- 在teleop_twist_keyboard的终端小范围前后左右移动小车,小车逐步确定它自身的位置。
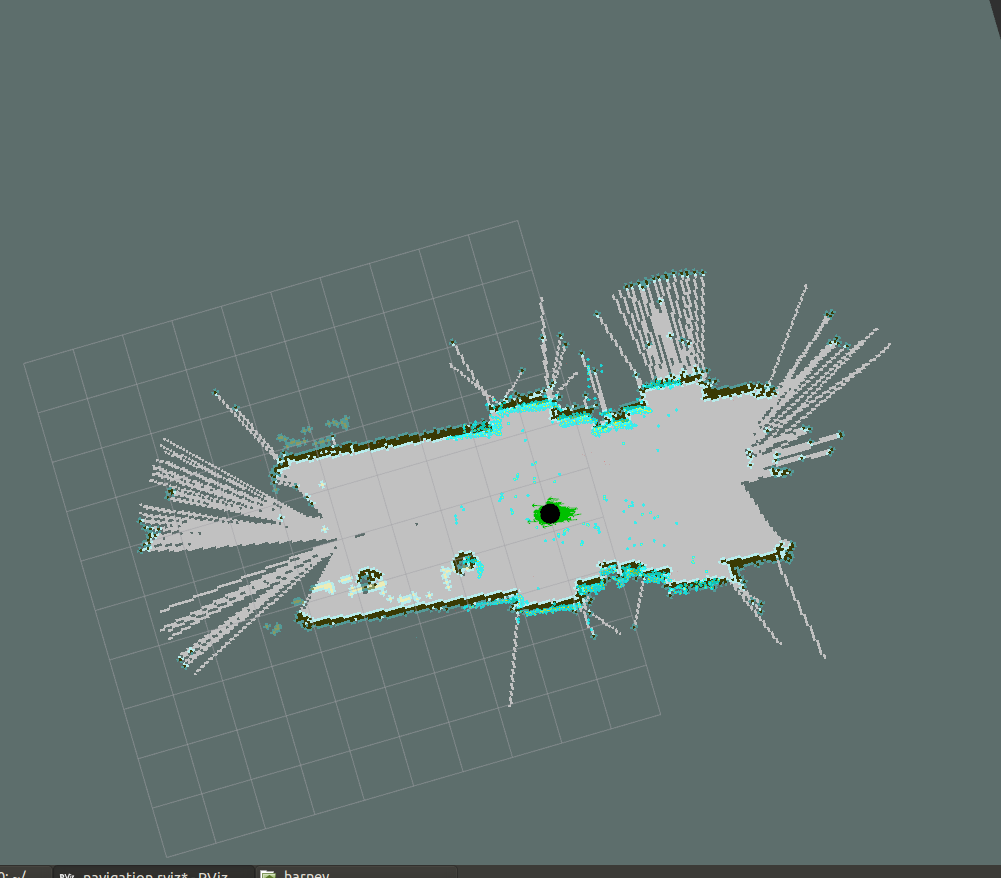
- 判断小车是否定位成功,主要看小车周围绿色的点是否收缩到一起。
- 如果不想给定初始位置,可以通过在amcl节点中修改如下参数的值,使粒子洒满地图的各个角落。
<param name="initial_cov_xx" value="8"/>
<param name="initial_cov_yy" value="8"/>
<param name="initial_cov_zz" value="8"/>
- 如果地图的特征不明显(比如走廊),可能定位失败
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号