



















Dashgo底盘入门教程-应用-搭建gmaping建图环境
Dashgo底盘入门教程-应用-搭建gmaping建图环境
说明:
- 介绍使用Rplidar a1激光雷达进行gmapping建图
实现步骤:
- 安装依赖包
sudo apt-get install ros-indigo-serial ros-indigo-turtlebot-rviz-launchers
- 创建工作空间,下载相应代码编译
mkdir -p ~/dashgo_ws/src
cd ~/dashgo_ws/src
## dashgo SLAM版本
git clone https://github.com/EAIBOT/dashgo.git
cd dashgo
git checkout slam_01
## 激光雷达rplidar 一代驱动
git clone https://github.com/robopeak/rplidar_ros.git
cd rplidar_ros
git checkout 1.0.1
## 建图依赖包
git clone https://github.com/ros-perception/slam_gmapping
git clone https://github.com/ros-perception/openslam_gmapping
git clone https://github.com/ros-planning/navigation.git
串口访问权限
- 创建dashgo和rplidar的串口别名的访问
roscd dashgo_bringup/startup
sudo sh create_dashgo_udev.sh
sudo sh create_rplidar_udev.sh
- 重新插拔连接电脑的USB线
运行
- 命令如下:
roslaunch dashgo_nav gmapping_demo.launch
rosrun dashgo_bringup teleop_twist_keyboard.py
roslaunch turtlebot_rviz_launchers view_navigation.launch
保存地图
- 命令如下:
roscd dashgo_nav/maps
rosrun map_server map_saver -f my_map
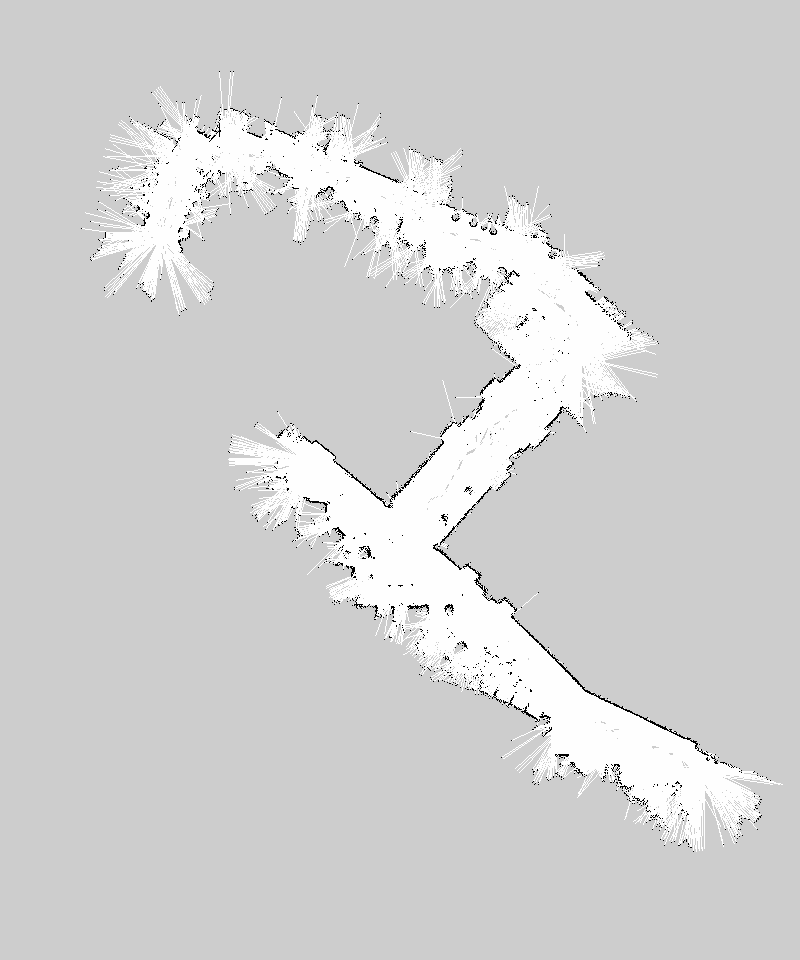
- 运行效果如下图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号