



















Dashgo底盘入门教程-应用-多点连续导航
Dashgo底盘入门教程-应用-多点连续导航
说明:
- 介绍如何实现多点连续导航
提示:
- PathGo 导航模块的默认固定 IP 是 192.168.31.200 ,默认用户名为 eaibot,默认密码为 eaibot 。
- 地图已经建好并引用的情况下
第一种方式
- 打开一个终端,ssh登录导航模块,运行导航launch
- 不带陀螺仪
$ ssh eaibot@192.168.31.200
$ roslaunch dashgo_nav navigation_demo.launch
- 或者带陀螺仪
$ ssh eaibot@192.168.31.200
$ roslaunch dashgo_nav navigation_demo_imu.launch
- 等待导航launch启动成功后,打开另一个终端,ssh登录导航模块,运行以下命令
$ ssh eaibot@192.168.31.200
$ rosrun dashgo_tools show_mark.py
- 再打开一个终端,运行以下命令打开rviz
$ export ROS_MASTER_URI=http://192.168.31.200:11311
$ roslaunch dashgo_rviz multi_goal.launch
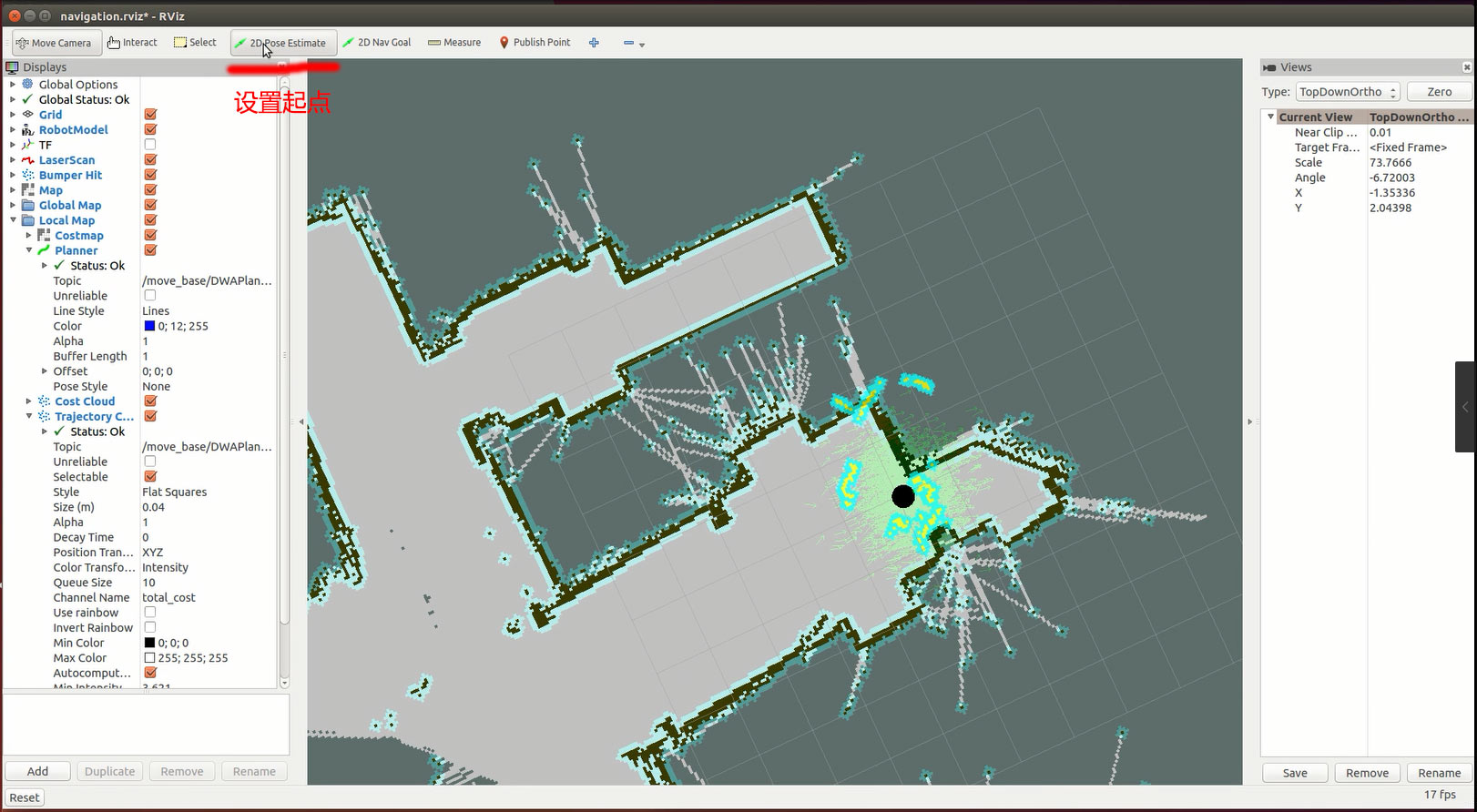
设置起点
- rviz 打开后显示 D1 默认所在的位置是栅格的中心点,不一定是 D1 实际所在的位置
- 注意:每次打开 rviz 都要检查并设置起点。
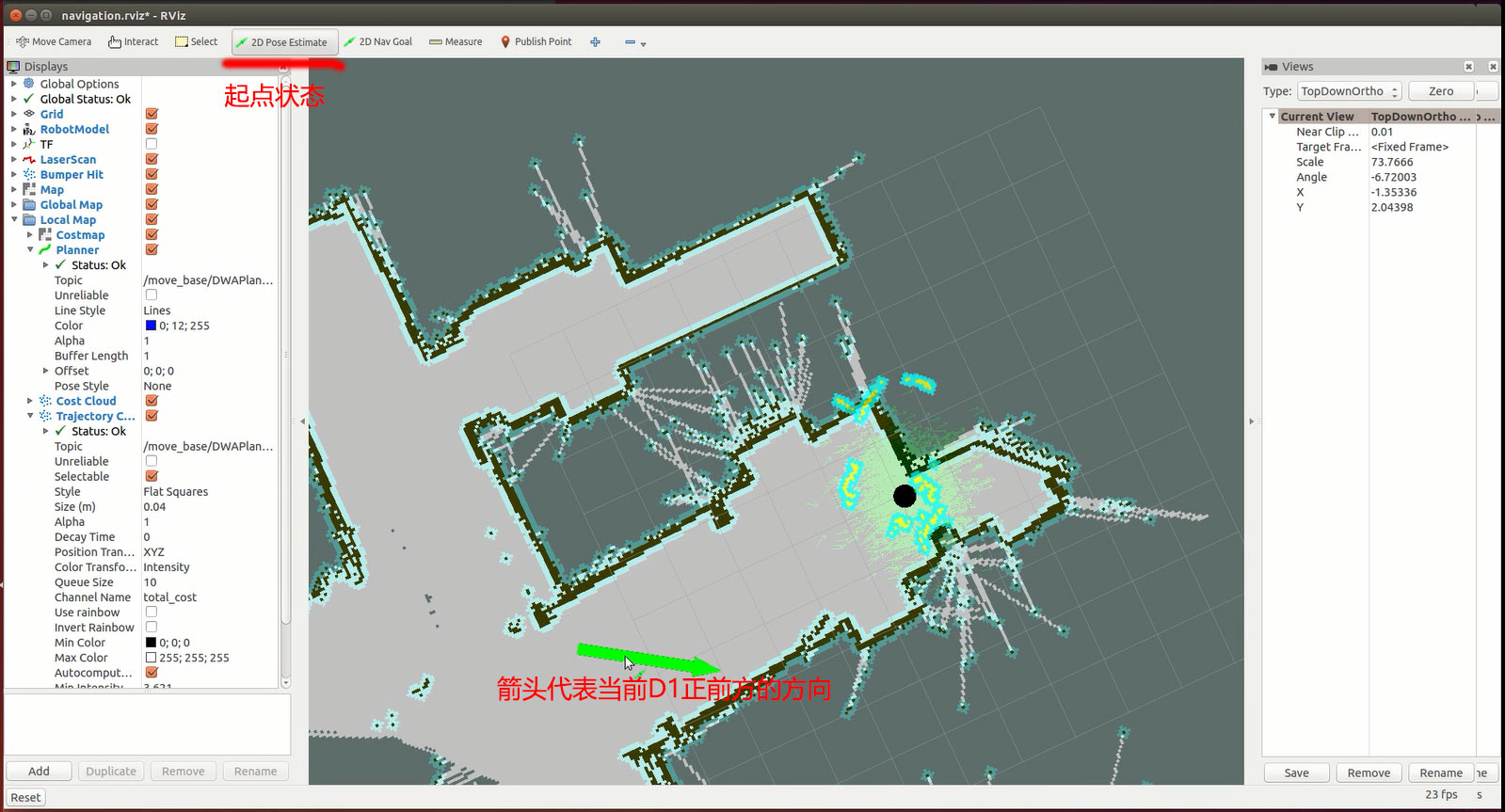
- 点击 2D Pose Estimate
- 根据当前 D1 实际位置,在地图上选择正确的位置,并调整好 D1 的正前方方向(正前方的调整:在选择位置时,按住鼠标不放,拖动方向便可)
设置连续目标点
Publish Point便是设置连续目标点,每选择一个目标点之前都要先点击Publish Point,目标点的序号在rviz中以0,1,2……的数字显示出来
一个目标点到达后便向下一个目标点移动
第二种方式
- 打开一个终端,ssh登录导航模块,运行导航launch
- 不带陀螺仪
$ ssh eaibot@192.168.31.200
$ roslaunch dashgo_nav navigation_demo_multi.launch
- 或者带陀螺仪
$ ssh eaibot@192.168.31.200
$ roslaunch dashgo_nav navigation_demo_imu_multi.launch
- 再打开一个终端,运行以下命令打开rviz
$ export ROS_MASTER_URI=http://192.168.31.200:11311
$ roslaunch dashgo_rviz multi_goal.launch
设置起点
- rviz 打开后显示 D1 默认所在的位置是栅格的中心点,不一定是 D1 实际所在的位置
- 注意:每次打开 rviz 都要检查并设置起点。
- 点击 2D Pose Estimate
- 根据当前 D1 实际位置,在地图上选择正确的位置,并调整好 D1 的正前方方向(正前方的调整:在选择位置时,按住鼠标不放,拖动方向便可)
设置连续目标点
Publish Point便是设置连续目标点,每选择一个目标点之前都要先点击Publish Point,目标点的序号在rviz中以0,1,2……的数字显示出来
一个目标点到达后便向下一个目标点移动
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号