



















ROS机器人Diego制作21-搭载EAI F4激光雷达gmapping创建室内地图
ROS机器人Diego制作21-搭载EAI F4激光雷达gmapping创建室内地图
说明:
- 介绍用F4激光雷达通过gmapping创建室内地图
- 上篇文章中我们用hector创建了室内地图,本文中我们采用gmapping来创建室内地图,hector和gmapping主要区别gmapping创建地图需要odom数据,而hector不需要,所以在gmapping创建地图首先要确保odom数据的准确性,否则会影像到创建地图的效果。
- 有关激光雷达,arduino的配置请参见上篇博文
编写gmapping的launch文件
创建diego_run_flashgo.launch
代码:
<launch>
<master auto="start"/>
<include file="$(find flashgo)/launch/lidar.launch" />
<node name="arduino" pkg="ros_arduino_python" type="arduino_node.py" output="screen">
<rosparam file="$(find ros_arduino_python)/config/my_arduino_params.yaml" command="load" />
</node>
<node pkg="tf" type="static_transform_publisher" name="base_frame_2_laser_link" args="0.0 0.0 0.2 3.14 3.14 0 /base_link /laser 40"/>
<!-- gmapping node -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping">
<param name="base_frame" value="base_link"/>
<param name="odom_frame" value="odom"/>
<param name="maxUrange" value="4.0"/>
<param name="maxRange" value="5.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="3"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="30"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.05"/>
<param name="angularUpdate" value="0.0436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="8"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
</launch>
启动launch
- 分别新终端,执行
roslaunch diego_nav diego_run_flashgo.launch
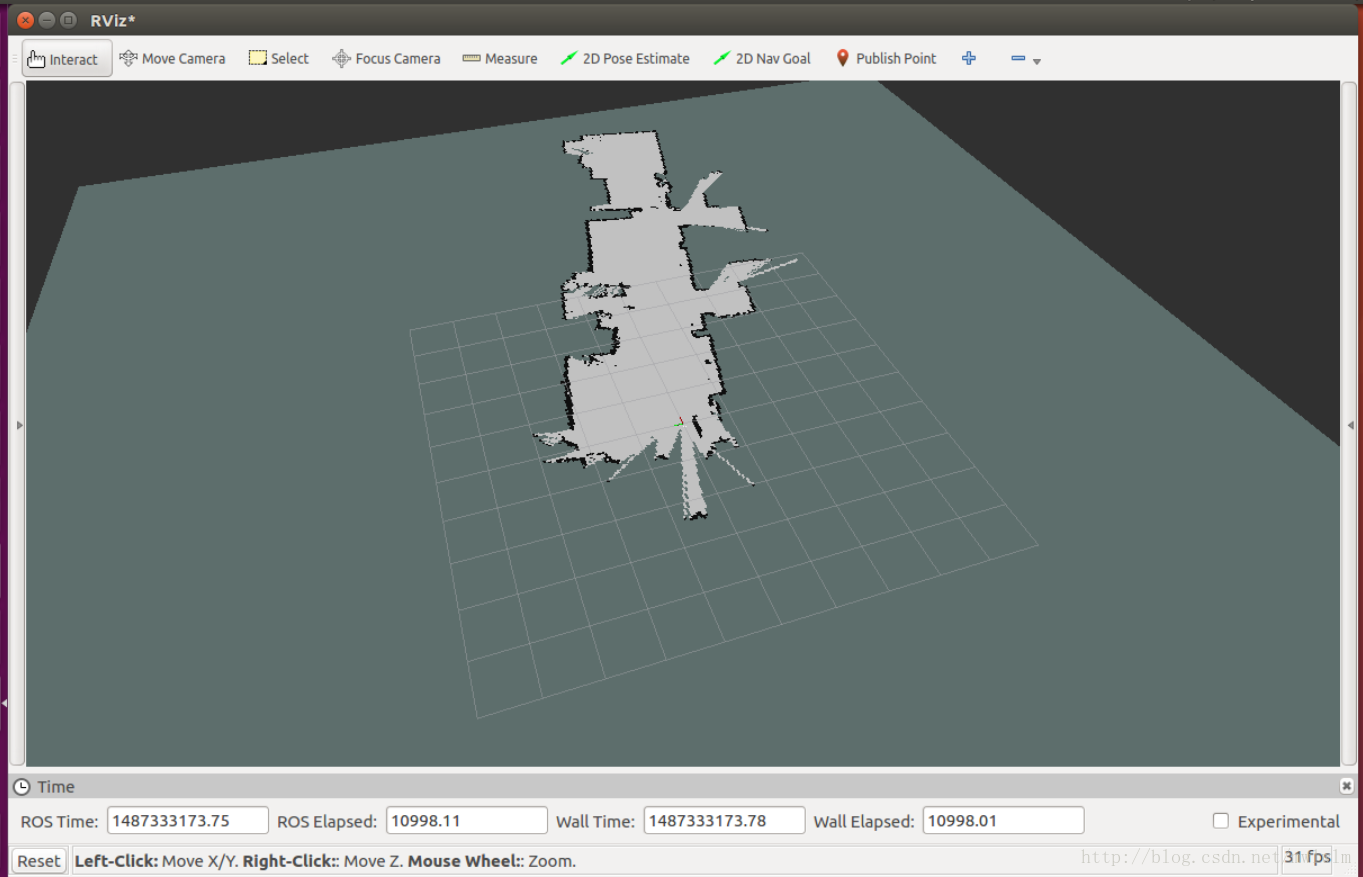
rosrun rviz rviz
- 效果:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号