



















ROS机器人Diego制作19-diego机器人的moveit驱动
ROS机器人Diego制作19-diego机器人的moveit驱动
说明:
- 介绍开发针对diego的驱动
- moveit作为一个很好的机械臂路径规划工具,大大降低了机械臂的开发的难度,很多功能都可以在模拟环境下测试运行。
- 如前面博客中讲到的,但要让真实的机器人能够按照moveit规划好的路径动起来,就需要开发连接机器人和moveit的驱动代码。
驱动的原理
图示:
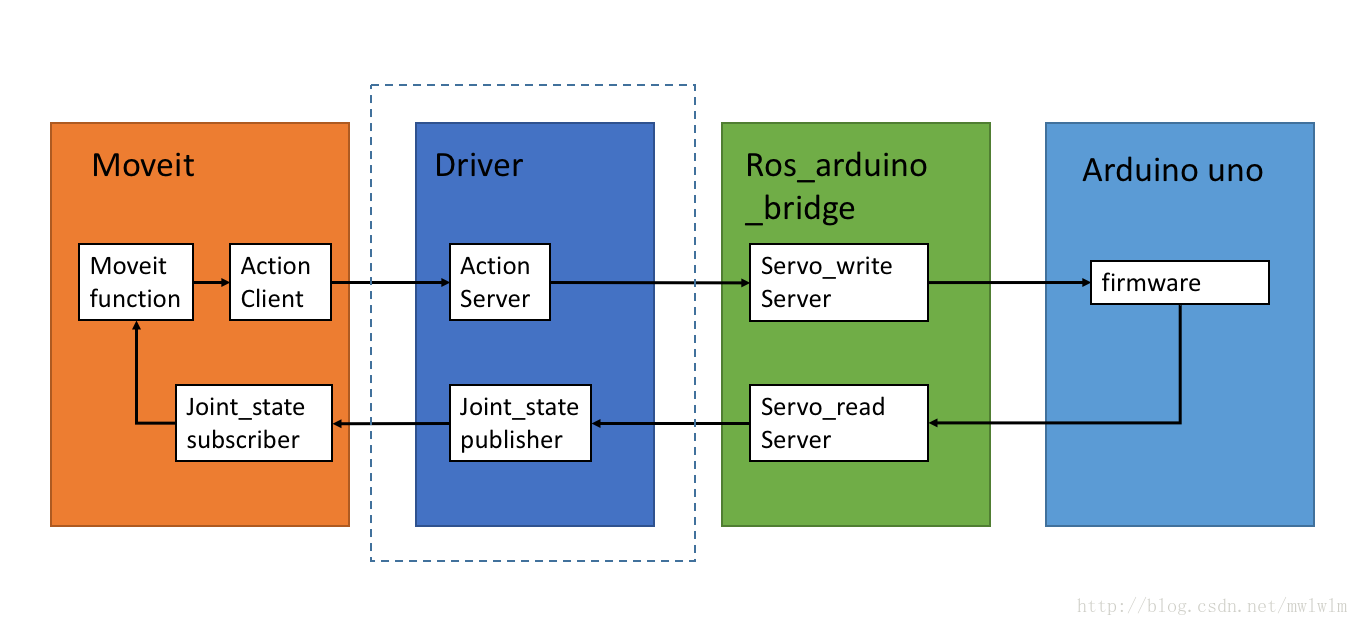
上图为通讯原理
首先,moveit把计算的结果通过Ros action的方式发送给driver,driver调用Ros_arduino_bridge的servor_write server发送各个关节舵机的控制指令给Arduino uno控制板
其次,同时Driver也要通过调用Ros_arduino_bridge的servo_read服务读取各个关节的舵机状态,通过joint_state消息的方式发送给moveit,供moveit进行路径规划计算。
在前面的博文中ros_arduino_bridge和arduino uno相应的修改都已经介绍过,这里就不在说明,主要的工作就是在driver上
控制器配置文件
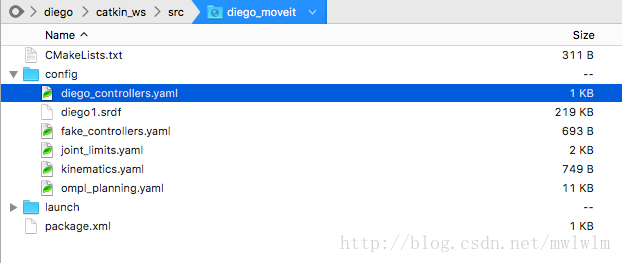
根据moveit官方的说明我们需要针对我们机械臂的控制器配置文件,并把其放在moveit assistant产生的配置文件目录的config子目录下,我这里配置文件起名为diego_controllers.yaml
图示:
配置文件代码如下:
controller_list:
- name: left_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- left_shoulder_stevo_to_axis
- left_shoulder_stevo_lift_to_axis
- left_big_arm_up_to_axis
- left_small_arm_up_to_axis
- left_wrist_run_stevo_to_axis
- name: rigth_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- right_shoulder_stevo_to_axis
- right_shoulder_stevo_lift_to_axis
- right_big_arm_up_to_axis
- right_small_arm_up_to_axis
- right_wrist_run_stevo_to_axis
- name: right_gripper_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- right_hand_run_stevo_to_right_hand_run_stevo_axis
- name: left_gripper_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- left_hand_run_stevo_to_left_hand_run_stevo_axis
官方的解释如下
The parameters are:
- name: The name of the controller. (See debugging information below for important notes).
- action_ns: The action namespace for the controller. (See debugging information below for important notes).
- type: The type of action being used (here FollowJointTrajectory).
- default: The default controller is the primary controller chosen by MoveIt! for communicating with a particular set of joints.
- joints: Names of all the joints that are being addressed by this interface.
通俗点理解/name/action_ns就是对应控制器的ros topic, diego配置文件中对于左臂的ros_topic就是/left_arm_controller/follow_joint_trajectory
type就是我们在drive中要声明的action service类型,在diego的driver中需要提供FollowJointTrajectoryAction接收moveit action client发送来的消息
joint.py关节类
- 代码如下:
from ros_arduino_msgs.srv import *
class Joint:
## @brief Constructs a Joint instance.
##
## @param servoNum The servo number.
##
## @param name The joint name.
def __init__(self, name, servoNum, range):
self.name = name #关节名称
self.servoNum=servoNum #对应的舵机编号
self.range=range #舵机的控制范围,这里是0~180度
self.position = 0.0
self.velocity = 0.0
self.last = rospy.Time.now()
## @brief Set the current position.
def setCurrentPosition(self):
rospy.wait_for_service('/arduino/servo_write')
try:
servo_write=rospy.ServiceProxy('/arduino/servo_write',ServoWrite)
servo_write(self.servoNum,self.position)
except rospy.ServiceException, e:
print "Service call failed: %s"%e
action server 控制器文件
- follow_controller.py 就是主要的驱动文件
JointTrajectory msg
- 驱动的核心其实就是follow_controller对JointTrajectory msg的处理,所以这里先介绍一下JointTrajectory msg,只要理解了JointTrajectory msg,其实驱动还是比较容易的。
- 在命令执行,如下命令就可以显示了JointTrajectory msg的结构
$ rosmsg show JointTrajectory
图示:
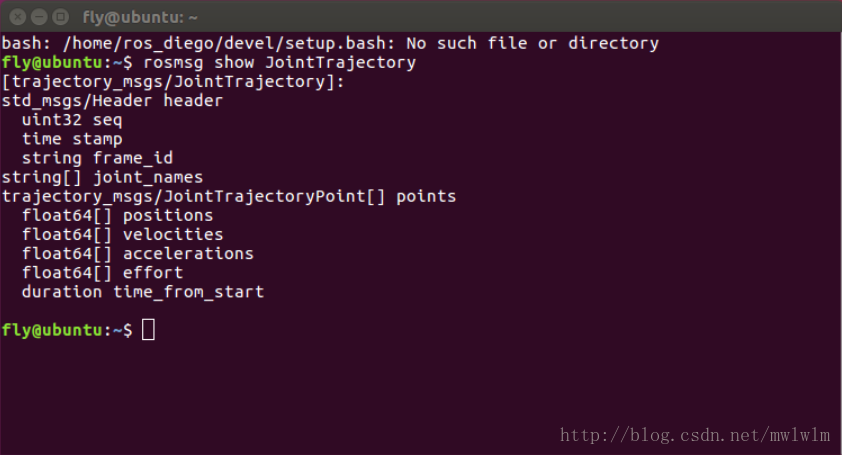
可以看到消息的结构体中包含了三部分
- a. header , 这是Ros的标准消息头这里就不多介绍了
- b. joint_names , 这是所有关节名称的数组
- c.JointTrajectoryPoint 这部分是驱动的关键,这个数组记录了机械臂从一种姿势到另外一种姿势所经过的路径点,moveit所产生的姿势路径是通过这些point点描述出来的,也就是我们驱动中要控制每个关节的舵机都按照这些point点进行运动,
- 每个point又是由一个结构体构成:
- positions这是一个float64的数组,记录每个point的时候舵机应该到达的角度,这里是弧度为单位的,比如说是6自由度的那每个Point的这个positions字段中应该包含六个数值[1.57,0,2,0.2,3,0.12],也就是我们舵机控制范围是180度,那这里面的取值范围就是0~π
- velocities这个数组记录了每个关节运动的速度
- accelerations这个数组记录每个关节运动的加速度
- effort这个参数不知道中文应该如何翻译,可以不用
- 每个point又是由一个结构体构成:
- d.time_from_start这个参数是指定从头部的timestamp开始算起多长时间要达到这个点的位置
follow_controller的初始化代码
- 初始化代码主要就是初始化joints列表,同时启动action Server:
- 代码如下:
def __init__(self, name):
self.name = name
# rates
self.rate = 20.0
# left Arm jonits list
self.left_shoulder_stevo_to_axis=Joint(left_shoulder_stevo_to_axis,6,PI)
self.left_shoulder_stevo_lift_to_axis=Joint(left_shoulder_stevo_lift_to_axis,7,PI)
self.left_big_arm_up_to_axis=Joint(left_big_arm_up_to_axis,8,PI)
self.left_small_arm_up_to_axis=Joint(left_small_arm_up_to_axis,9,PI)
self.left_wrist_run_stevo_to_axis=Joint(left_wrist_run_stevo_to_axis,10,PI)
self.joints=list()
self.joints.append(left_shoulder_stevo_to_axis)
self.joints.append(left_shoulder_stevo_lift_to_axis)
self.joints.append(left_big_arm_up_to_axis)
self.joints.append(left_small_arm_up_to_axis)
self.joints.append(left_wrist_run_stevo_to_axis)
# left hand joint
self.left_hand_run_stevo_to_left_hand_run_stevo_axis=Joint(left_hand_run_stevo_to_left_hand_run_stevo_axis,11,PI)
self.joints.append(left_hand_run_stevo_to_left_hand_run_stevo_axis)
# right Arm jonits
self.right_shoulder_stevo_to_axis=Joint(right_shoulder_stevo_to_axis,0,PI)
self.right_shoulder_stevo_lift_to_axis=Joint(right_shoulder_stevo_lift_to_axis,1,PI)
self.right_big_arm_up_to_axis=Joint(right_big_arm_up_to_axis,2,PI)
self.right_small_arm_up_to_axis=Joint(right_small_arm_up_to_axis,3,PI)
self.right_wrist_run_stevo_to_axis=Joint(right_wrist_run_stevo_to_axis,4,PI)
self.joints.append(right_shoulder_stevo_to_axis)
self.joints.append(right_shoulder_stevo_lift_to_axis)
self.joints.append(right_big_arm_up_to_axis)
self.joints.append(right_small_arm_up_to_axis)
self.joints.append(right_wrist_run_stevo_to_axis)
# left hand joint
self.right_hand_run_stevo_to_right_hand_run_stevo_axis=Joint(right_hand_run_stevo_to_right_hand_run_stevo_axis,5,PI)
self.joints.append(right_hand_run_stevo_to_right_hand_run_stevo_axis)
# set the left arm back to the resting position
rospy.loginfo("set the left arm back to the resting position")
self.left_shoulder_stevo_to_axis.setCurrentPosition(PI/2)
self.left_shoulder_stevo_lift_to_axis.setCurrentPosition(PI/2)
self.left_big_arm_up_to_axis.setCurrentPosition(PI/2)
self.left_small_arm_up_to_axis.setCurrentPosition(PI/2)
self.left_wrist_run_stevo_to_axis.setCurrentPosition(PI/2)
# set the right arm back to the resting position
rospy.loginfo("set the right arm back to the resting position")
self.right_shoulder_stevo_to_axis.setCurrentPosition(PI/2)
self.right_shoulder_stevo_lift_to_axis.setCurrentPosition(PI/2)
self.right_big_arm_up_to_axis.setCurrentPosition(PI/2)
self.right_small_arm_up_to_axis.setCurrentPosition(PI/2)
self.right_wrist_run_stevo_to_axis.setCurrentPosition(PI/2)
# set the left hand back to the resting position
rospy.loginfo("set the left hand back to the resting position")
self.left_hand_run_stevo_to_left_hand_run_stevo_axis.setCurrentPosition(PI/2)
# set the right hand back to the resting position
rospy.loginfo("set the right hand back to the resting position")
self.right_hand_run_stevo_to_right_hand_run_stevo_axis.setCurrentPosition(PI/2)
# action server
self.server = actionlib.SimpleActionServer('follow_joint_trajectory', FollowJointTrajectoryAction, execute_cb=self.actionCb, auto_start=True)
rospy.loginfo("Started FollowController")
actionCb函数
在初始化代码中Action Service的回调函数是actionCb,也就是收到msg后就会调用这个函数,对于节点舵机的控制也就是在这个函数中实现,代码的实现原理见下面的代码注释:
代码:
def actionCb(self, goal):
rospy.loginfo(self.name + ": Action goal recieved.")
traj = goal.trajectory
if not traj.points:#判断收到的消息是否为空
msg = "Trajectory empy."
rospy.logerr(msg)
self.server.set_aborted(text=msg)
return
try:
indexes = [traj.joint_names.index(joint.name) for joint in self.joints]#按照joints列表的顺序对traj的数据进行排序,把排序数据放到indexes中
except ValueError as val:
msg = "Trajectory invalid."
rospy.logerr(msg)
self.server.set_aborted(text=msg)
return
start = traj.header.stamp#当前的时间戳
if start.secs == 0 and start.nsecs == 0:
start = rospy.Time.now()
r = rospy.Rate(self.rate)
for point in traj.points:
desired = [ point.positions[k] for k in indexes ]#期望的控制点
for i in indexes
self.joints[i].position=desired[i]#控制点对应的舵机的位置
self.joints[i].setCurrentPosition()#发送舵机的控制命令
while rospy.Time.now() + rospy.Duration(0.01) < start:#如果当前时间小于舵机这个点预期完成时间,则等待
rospy.sleep(0.01)
rospy.loginfo(self.name + ": Done.")
- 在此段代码中,忽略了控制速度和加速度的设置,因为我们此机械臂的舵机无法控制舵机的速度和加速度,只要能到达预期控制点就可以了。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号