



















ROS与VSLAM入门教程-kinect v1使用RTAB-MAP建图和导航
ROS与VSLAM入门教程-kinect v1使用RTAB-MAP建图和导航
说明:
- 介绍如何通过kinect v1实现RTAB-MAP建图和导航
步骤:
- 安装RTAB-MAP
$ sudo apt-get install ros-indigo-rtabmap-ros
建图:
- 启动底盘:
$ roslaunch turtlebot_bringup minimal.launch
- 执行建图:
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch
- 启动RVIZ:
$ roslaunch rtabmap_ros demo_turtlebot_rviz.launch
or
$ rosrun rviz rviz -d turtlebot_navigation.rviz
- 启动键盘:
$ roslaunch turtlebot_teleop keyboard_teleop.launch
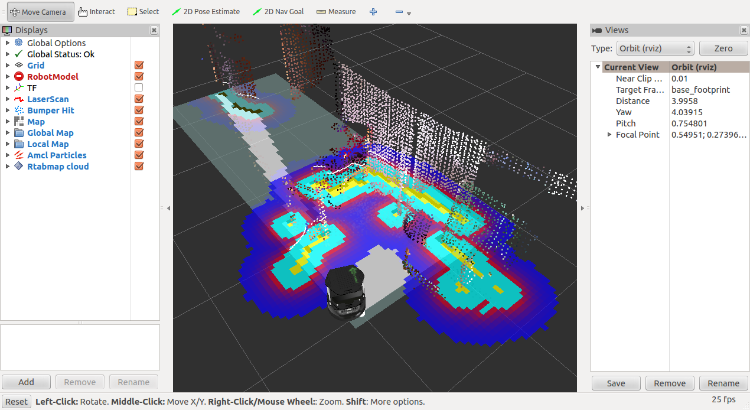
- 效果如图:
- 地图保存在~/.ros/rtabmap.db,如果想重新建图:
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch args:="--delete_db_on_start"
导航:
- 启动底盘:
$ roslaunch turtlebot_bringup minimal.launch
- 执行定位:
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch localization:=true
- 启动RVIZ
$ roslaunch turtlebot_rivz_launcher view_navigation.launch
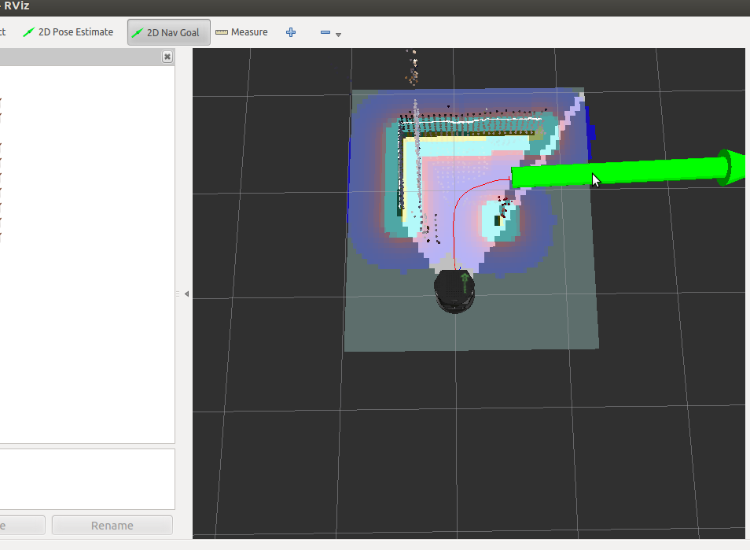
- 初始化定位,设置目标点,即可实现自主导航。
- 效果如图:
参考:
- http://wiki.ros.org/rtabmap_ros/Tutorials/MappingAndNavigationOnTurtlebot
- https://github.com/introlab/rtabmap_ros#rtabmap_ros
- https://github.com/introlab/rtabmap/wiki/Tutorials
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号