



















ArduSub入门教程-开发者
ArduSub入门教程-开发者
说明:
- 介绍如何获取代码并编译代码相关信息
如何获取代码
- 该ArduSub代码保持在一个Github存储库中。获取代码的最佳方法是克隆该存储库。
git clone https://github.com/bluerobotics/ardusub.git
- 您也可以下载代码从右侧边栏的zip文件Github的网站。
编译
make [board type]
- 例如,为Pixhawk 1:
make px4-v2
- 可用的板型,可以通过以上输入,被视为make不带参数。
上传
- 要上传代码到一个PixHawk或类似的控制器,添加-upload到构建命令。例如:
make px4-v2-upload
- 这只适用于直接USB连接到Pixhawk。如果您使用的是随播计算机和以太网络连接,则可以通过随播计算机上传代码。
- 请参阅通过SSH烧录Pixhawk关于如何做到这一点的说明。
运行
- 代码在上传后立即开始运行。对于基于Linux的自动向导,必须使用启动脚本启动或启动。请参阅相应自动驾驶仪的文档。
- 配套计算机也设置为自动启动并连接到自动驾驶仪。
- 请参阅伴侣电脑网页获取更多设置细节。
进行自定义配置
- ArduSub代码最大的增加之一是六自由度电机库,可轻松设置各种电机配置。
- 每个配置的电机库都建立在一组更高级别的电机类上,如下所示:
AP_Motors
|---- AP_MotorsMulticopter
|---- AP_MotorsMatrix
|---- AP_Motors6DOF
- 要添加新的电机配置,则需要自定义电机设置添加到AP_Motors6DOF.cpp。找到以下行,并在那里添加您的帧配置。
- 根据FRAME_CONFIG参数,在引导时配置帧。您将需要将此参数更改为CUSTOM以使用自定义框架。
case AS_MOTORS_CUSTOM_FRAME:
// Put your custom motor setup here
- 每个电机的行为将由其分配的对AP_Motors6DOF.cpp中的6个自由度中的每一个的contributions来定义。
- 您可以使用其他框架配置作为参考指南来定义自己的自定义配置。
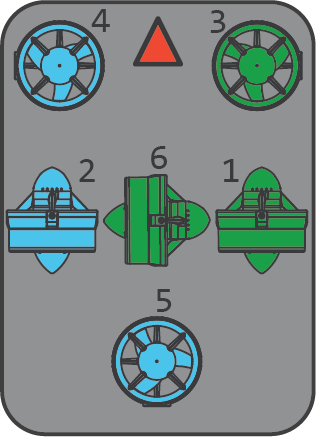
- 这里以BlueROV1框架配置为例:
| 发动机 # | 滚动因子 | 音调因子 | 偏航系数 | 节流因素 | 正向因子 | 横向因素 |
| 1 | 0 | 0 | -1.0 | 0 | 1.0 | 0 |
| 2 | 0 | 0 | 1.0 | 0 | 1.0 | 0 |
| 3 | -0.5 | 0.5 | 0 | 0.45 | 0 | 0 |
| 4 | 0.5 | 0.5 | 0 | 0.45 | 0 | 0 |
| 5 | 0 | -1.0 | 0 | 1.0 | 0 | 0 |
| 6 | -0.25 | 0 | 0 | 0 | 0 | 1.0 |
- 图示:
添加功能
- 待完成
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号