



















ROS与C++入门教程-actionlib-编写简单的action客户端
ROS与C++入门教程-actionlib-编写简单的action客户端
说明:
- 介绍使用simple_action_client库创建action客户端
- 介绍创建action客户端并发送goal到action服务器。
创建客户端
- 创建文件actionlib_tutorials/src/fibonacci_client.cpp,参考代码:github
cd ~/catkin_ws/actionlib_tutorials/src
touch fibonacci_client.cpp
vim fibonacci_client.cpp
- 代码如下:
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/client/terminal_state.h>
#include <actionlib_tutorials/FibonacciAction.h>
int main (int argc, char **argv)
{
ros::init(argc, argv, "test_fibonacci");
// create the action client
// true causes the client to spin its own thread
actionlib::SimpleActionClient<actionlib_tutorials::FibonacciAction> ac("fibonacci", true);
ROS_INFO("Waiting for action server to start.");
// wait for the action server to start
ac.waitForServer(); //will wait for infinite time
ROS_INFO("Action server started, sending goal.");
// send a goal to the action
actionlib_tutorials::FibonacciGoal goal;
goal.order = 20;
ac.sendGoal(goal);
//wait for the action to return
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));
if (finished_before_timeout)
{
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action finished: %s",state.toString().c_str());
}
else
ROS_INFO("Action did not finish before the time out.");
//exit
return 0;
}
代码解释:
- 代码:
#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include <actionlib/client/terminal_state.h>
解释:
- simple_action_client.h用来执行简单的action客户端
- terminal_state.h 定义goal的状态
代码:
#include <actionlib_tutorials/FibonacciAction.h>
解释:
- 由Fibonacci.action文件自动生成的头文件
代码:
int main (int argc, char **argv)
{
ros::init(argc, argv, "test_fibonacci");
// create the action client
// true causes the client to spin its own thread
actionlib::SimpleActionClient<actionlib_tutorials::FibonacciAction> ac("fibonacci", true);
解释:
- action客户端依照action模板定义的消息类型与action服务器进行通讯
- action客户端构造器需要提供两个参数:服务器名称和boolean选项(是否打开线程)。
代码:
ROS_INFO("Waiting for action server to start.");
// wait for the action server to start
ac.waitForServer(); //will wait for infinite time
解释:action服务器可能没启动,客户端会等待服务器启动成功再继续。
代码:
ROS_INFO("Action server started, sending goal.");
// send a goal to the action
actionlib_tutorials::FibonacciGoal goal;
goal.order = 20;
ac.sendGoal(goal);
- 解释:创建goal消息,设置定值并发送给服务器。
- 代码:
//wait for the action to return
bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0));
- 解释:客户端等待服务器完成,时间间隔为30秒,超时则返回false。
- 代码:
if (finished_before_timeout)
{
actionlib::SimpleClientGoalState state = ac.getState();
ROS_INFO("Action finished: %s",state.toString().c_str());
}
else
ROS_INFO("Action did not finish before the time out.");
//exit
return 0;
}
- 解释:如果服务器完成, goal的状态会被报告。
编译:
- 更改 CMakeLists.txt 文件
add_executable(fibonacci_client src/fibonacci_client.cpp)
target_link_libraries(
fibonacci_client
${catkin_LIBRARIES}
)
add_dependencies(
fibonacci_client
${actionlib_tutorials_EXPORTED_TARGETS}
)
- 编译:
cd ~/catkin_ws
catkin_make
source devel/setup.bash
运行
- 新终端,执行roscore:
$ roscore
- 新终端,执行客户端:
$ rosrun actionlib_tutorials fibonacci_client
- 显示:
[ INFO] 1250806286.804217000: Started node [/test_fibonacci], pid [9414], bound on [aqy], xmlrpc port [35466], tcpros port [55866], logging to [~/ros/ros/log/test_fibonacci_9414.log], using [real] time
[ INFO] 1250806287.828279000: Waiting for action server to start.
- 检查:
$ rostopic list -v
- 显示:
Published topics:
* /fibonacci/goal [actionlib_tutorials/FibonacciActionGoal] 1 publisher
* /fibonacci/cancel [actionlib_msgs/GoalID] 1 publisher
* /rosout [rosgraph_msgs/Log] 1 publisher
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
Subscribed topics:
* /fibonacci/feedback [actionlib_tutorials/FibonacciActionFeedback] 1 subscriber
* /rosout [rosgraph_msgs/Log] 1 subscriber
* /fibonacci/status [actionlib_msgs/GoalStatusArray] 1 subscriber
* /fibonacci/result [actionlib_tutorials/FibonacciActionResult] 1 subscriber
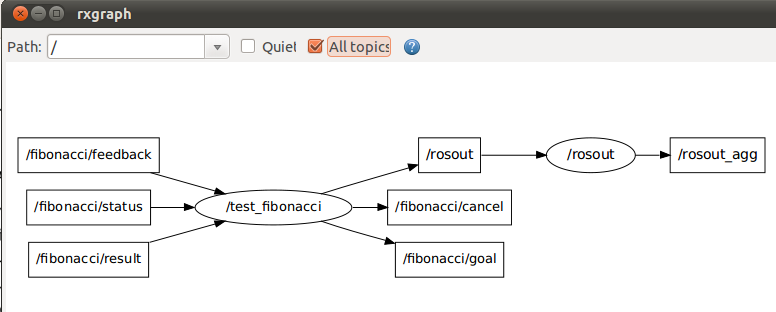
- 图形查看:
$ rqt_graph
- 效果:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号