



















ROS与C++入门教程-tf-增加坐标系
ROS与C++入门教程-tf-增加坐标系
说明:
- 介绍如何为TF增加额外固定的坐标系
为何增加坐标系
- 对于许多任务,更容易在本地坐标内思考。
- 例如,更容易推断在激光扫描器中心的坐标系中的激光扫描。
- tf允许您为系统中的每个传感器,链接等定义一个本地坐标系。
- 并且,tf将处理所引入的所有额外坐标系的变换。
那里增加坐标系
- tf建立坐标系的树结构; 它不允许在坐标系结构中存在闭环。
- 这意味着一个坐标系只有一个父系,但它可以有多个子系。
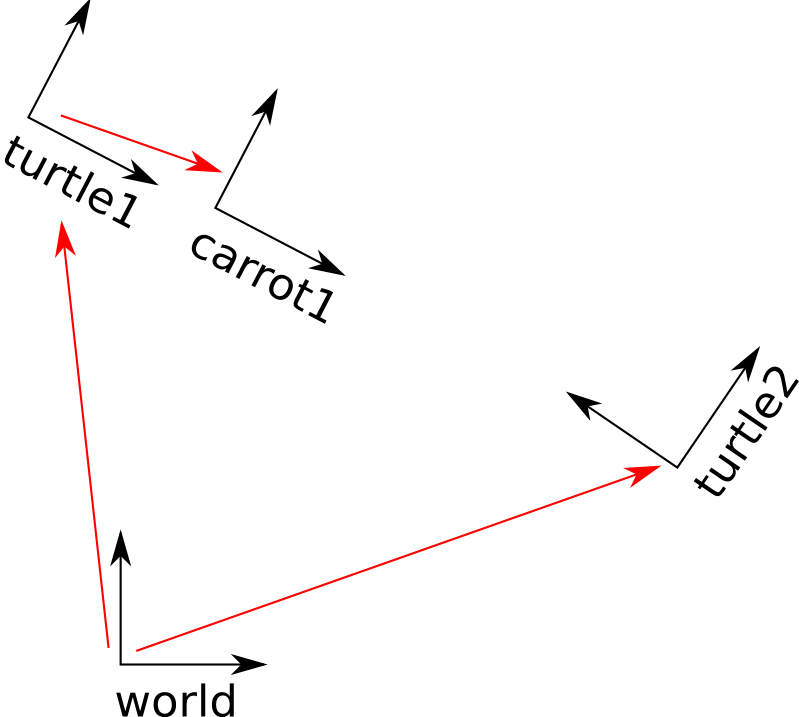
- 目前我们的tf树包含三个坐标系:world,turtle1和turtle2。 两只乌龟是世界的子系。
- 如果我们要向tf添加一个新坐标系,三个现有坐标系中的一个需要是父系,新坐标系将成为子系。
- 图示:
如何添加坐标系
- 在我们的乌龟例子中,我们将添加一个新的坐标系carrot1到turtle1。
- 新建文件frame_tf_broadcaster.cpp:
$ roscd learning_tf
$ touch src/frame_tf_broadcaster.cpp
$ vim src/frame_tf_broadcaster.cpp
- 代码如下:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_broadcaster");
ros::NodeHandle node;
tf::TransformBroadcaster br;
tf::Transform transform;
ros::Rate rate(10.0);
while (node.ok()){
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1"));
rate.sleep();
}
return 0;
};
- 代码类似广播变换
代码解释:
- 代码:
transform.setOrigin( tf::Vector3(0.0, 2.0, 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "turtle1", "carrot1")
- 解释:我们创建transform,从父系turtle1到子系carrot1,carrot1离左边的turtle12米远
编译运行
- 打开CMakeLists.txt
$ rosed learning_tf CMakeLists.txt
- 在底部增加代码:
add_executable(frame_tf_broadcaster src/frame_tf_broadcaster.cpp)
target_link_libraries(frame_tf_broadcaster ${catkin_LIBRARIES})
- 编译:
$ cd ~/catkin_ws
$ catkin_make
编译顺利,在bin目录会生成frame_tf_broadcaster文件
编辑start_demo.launch
$ rosed learning_tf start_demo.launch
- 增加新代码:
<launch>
...
<node pkg="learning_tf" type="frame_tf_broadcaster"
name="broadcaster_frame" />
</launch>
- 运行:
$ roslaunch learning_tf start_demo.launch
检查结果:
- 接着上个教程的,如果你驱动turtle1,你注意到,即使我们添加了一个新的坐标系,行为没有改变。 这是因为添加额外的坐标系不会影响其他坐标系,我们的监听器仍然使用先前定义的坐标系。 所以,让我们改变监听器的行为。
- 编辑src/turtle_tf_listener.cpp,在26-27行用/carrot1替换/turtle1,如:
listener.lookupTransform("/turtle2", "/carrot1",
ros::Time(0), transform);
- 编译运行:
$ catkin_make
$ roslaunch learning_tf start_demo.launch
- 应该可以看到,turtle2跟随carrot1变化,而不是turtle1
广播移动的坐标系
- 我们在本教程中发布的额外坐标系是一个固定的坐标系,不随时间改变相对于父系。 但是,如果要发布移动坐标系,您可以更改广播器以随时间更改。 让我们修改/carrot1坐标系以相对于/turtle1随时间改变。
- 修改编辑src/turtle_tf_listener.cpp
$ vim src/frame_tf_broadcaster.cpp
- 代码如下:
transform.setOrigin( tf::Vector3(2.0*sin(ros::Time::now().toSec()), 2.0*cos(ros::Time::now().toSec()), 0.0) );
transform.setRotation( tf::Quaternion(0, 0, 0, 1) );
- 编译运行:
$ catkin_make
$ roslaunch learning_tf start_demo.launch
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号