



















ROS机器人Diego制作3-利用ros_arduino_bridge实现base controller
ROS机器人Diego制作3-利用ros_arduino_bridge实现base controller
说明:
- 介绍软件包ros_arduino_bridge使用,此软件包用于驱动底盘
- ROS的控制模型中,对底盘的驱动+马达的PID调节 = base controller
- 参考:http://wiki.ros.org/ros_arduino_bridge
- ros_arduino_bridge封装了通过串口于底盘控制器Arduino的通信,并提供了一个标准的base controller,所以对arduino资源的占用非常小
- arduino只是作为一个单纯的硬件控制器来使用,而所有的运算逻辑都放在上位机进行,通过串口指令的方式控制Arduino程序的运行。
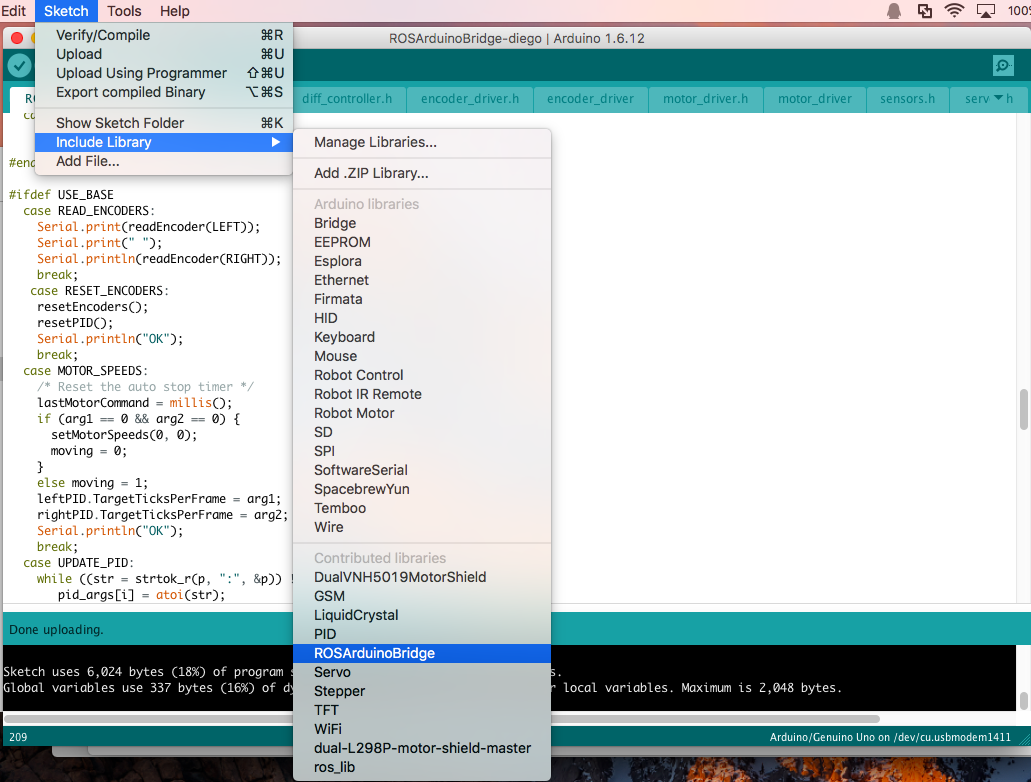
- 在Arduino UNO编译一个完整的ros_arduino_bridge后的资源占用情况如下图:

- 从上图可以看出占用资源非常上,用户还可以在Arduino UNO开发更多的应用,接更多的传感器
ros_arduino_bridge的安装
- 详细的安装和使用说明,参考ROS与Arduino-ros_arduino_bridge-功能包的使用
- 下载:进入你的workspace目录下的src目录,catkin_ws是workspace
cd ~/catkin_ws/src
git clone https://github.com/hbrobotics/ros_arduino_bridge.git
- 编译:在workspace目录编译
cd <catkin_ws>
catkin_make
- 使用:拷贝Arduino库文件到相应的Arduino IDE的libraries目录
$ cd SKETCHBOOK_PATH//Arduino IDE的库文件目录
$ \cp -rp `rospack find ros_arduino_firmware`/src/libraries/ROSArduinoBridge -T ROSArduinoBridge
- 这时候可以把ROSArduinoBridge拷贝到其他windows, Mac电脑的Arduino IDE环境下使用,重启后既可以用
开发Arduino代码
- 从Example中打开ROSArduinoBridge的示例代码,另存为自己喜欢的项目名称,我们只需要根据自己的需求修改示例代码即可

示例代码文件介绍
- ROSArduinoBridge.ino 主程序
- commands.h 串口命令的预定义
- diff_controller.h PID控制代码
- encoder_driver.h 编码器,这里只是针对了Arduino UNO,使用了中断接口D2,D3,和模拟接口A4,A5;所以电机编码器的输出接线需要按照此规则接线,另外要注意编码器要有两路输出
- 左侧电机的编码输出接D2,D3;右侧电机的编码输出接A4,A5
- encoder_driver.ino 编码器的实现代码
- motor_driver.h 马达驱动的接口定义,用不动的马达驱动板都要实现此文件定义的三个函数
- motor_driver.ino马达驱动实现代码,根据预定义选择不同的驱动板库,在这里我使用了L298P,所以需要自己实现一个新的驱动库,后面会介绍
- sensors.h传感器的实现文件
- servos.h舵机的实现文件
修改ROSArduinoBridge.ino
为了满足我们控制的需要需要修改的是ROSArduinoBridge.ino文件,主要修改的点如下:
- 启用Base Controller
#define USE_BASE // Enable the base controller code启用base controller
//#undef USE_BASE // Disable the base controller code
- 马达控制板定义
/* Define the motor controller and encoder library you are using */
#ifdef USE_BASE
/* The Pololu VNH5019 dual motor driver shield */
//#define POLOLU_VNH5019
/* The L298P dual motor driver shield,这里我们使用我们自己写的L298P库 */
#define L298P
/* The Pololu MC33926 dual motor driver shield */
//#define POLOLU_MC33926
/* The RoboGaia encoder shield */
//#define ROBOGAIA
/* Encoders directly attached to Arduino board,启用Arduino UNO的板载Encoder功能 */
#define ARDUINO_ENC_COUNTER
#endif
- 定义电机PWM控制范围
/* Maximum PWM signal */
#define MAX_PWM 255//最大的PWM为255
修改motor_driver.ino
- 主要是增加对L298P马达驱动板的支持
/***************************************************************
Motor driver definitions
Add a "#elif defined" block to this file to include support
for a particular motor driver. Then add the appropriate
#define near the top of the main ROSArduinoBridge.ino file.
*************************************************************/
#ifdef USE_BASE
#if defined POLOLU_VNH5019
/* Include the Pololu library */
#include "DualVNH5019MotorShield.h"
/* Create the motor driver object */
DualVNH5019MotorShield drive;
/* Wrap the motor driver initialization */
void initMotorController() {
drive.init();
}
/* Wrap the drive motor set speed function */
void setMotorSpeed(int i, int spd) {
if (i == LEFT) drive.setM1Speed(spd);
else drive.setM2Speed(spd);
}
// A convenience function for setting both motor speeds
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#elif defined POLOLU_MC33926
/* Include the Pololu library */
#include "DualMC33926MotorShield.h"
/* Create the motor driver object */
DualMC33926MotorShield drive;
/* Wrap the motor driver initialization */
void initMotorController() {
drive.init();
}
/* Wrap the drive motor set speed function */
void setMotorSpeed(int i, int spd) {
if (i == LEFT) drive.setM1Speed(spd);
else drive.setM2Speed(spd);
}
// A convenience function for setting both motor speeds
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#elif defined L298P////////增加对L298P的支持
#include "DualL298PMotorShield.h"
/* Create the motor driver object */
DualL298PMotorShield drive;
/* Wrap the motor driver initialization */
void initMotorController() {
drive.init();
}
/* Wrap the drive motor set speed function */
void setMotorSpeed(int i, int spd) {
if (i == LEFT) drive.setM1Speed(spd);
else drive.setM2Speed(spd);
}
// A convenience function for setting both motor speeds
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
setMotorSpeed(LEFT, leftSpeed);
setMotorSpeed(RIGHT, rightSpeed);
}
#else
#error A motor driver must be selected!
#endif
#endif
增加L298P的驱动库
- L298P的驱动库,把.h和.cpp文件放在同一个目录下,拷贝到Arduino IDE的库文件目录下就可以
- DualL298PMotorShield.h代码
#ifndef DualL298PMotorShield_h
#define DualL298PMotorShield_h
#include <Arduino.h>
class DualL298PMotorShield
{
public:
// CONSTRUCTORS
DualL298PMotorShield(); // Default pin selection.
DualL298PMotorShield(unsigned char M1DIR, unsigned char M1PWM,
unsigned char M2DIR, unsigned char M2PWM); // User-defined pin selection.
// PUBLIC METHODS
void init(); // Initialize TIMER 1, set the PWM to 20kHZ.
void setM1Speed(int speed); // Set speed for M1.
void setM2Speed(int speed); // Set speed for M2.
void setSpeeds(int m1Speed, int m2Speed); // Set speed for both M1 and M2.
private:
static const unsigned char _M1DIR = 4;
static const unsigned char _M2DIR = 7;
static const unsigned char _M1PWM = 5;
static const unsigned char _M2PWM = 6;
};
#endif
- DualL298PMotorShield.cpp代码
#include "DualL298PMotorShield.h"
// Constructors ////////////////////////////////////////////////////////////////
DualL298PMotorShield::DualL298PMotorShield()
{
//Pin map
}
// Public Methods //////////////////////////////////////////////////////////////
void DualL298PMotorShield::init()
{
// Define pinMode for the pins and set the frequency for timer1.
pinMode(_M1DIR,OUTPUT);
pinMode(_M1PWM,OUTPUT);
pinMode(_M2DIR,OUTPUT);
pinMode(_M2PWM,OUTPUT);
}
// Set speed for motor 1, speed is a number betwenn -400 and 400
void DualL298PMotorShield::setM1Speed(int speed)
{
unsigned char reverse = 0;
if (speed < 0)
{
speed = -speed; // Make speed a positive quantity
reverse = 1; // Preserve the direction
}
if (speed > 255) // Max PWM dutycycle
speed = 255;
if (reverse)
{
digitalWrite(_M1DIR,LOW);
analogWrite(_M1PWM, speed);
}
else
{
digitalWrite(_M1DIR,HIGH);
analogWrite(_M1PWM, speed);
}
}
// Set speed for motor 2, speed is a number betwenn -400 and 400
void DualL298PMotorShield::setM2Speed(int speed)
{
unsigned char reverse = 0;
if (speed < 0)
{
speed = -speed; // Make speed a positive quantity
reverse = 1; // Preserve the direction
}
if (speed > 255) // Max PWM dutycycle
speed = 255;
if (reverse)
{
digitalWrite(_M2DIR,LOW);
analogWrite(_M2PWM, speed);
}
else
{
digitalWrite(_M2DIR,HIGH);
analogWrite(_M2PWM, speed);
}
}
// Set speed for motor 1 and 2
void DualL298PMotorShield::setSpeeds(int m1Speed, int m2Speed)
{
setM1Speed(m1Speed);
setM2Speed(m2Speed);
}
- 修改完成后变可以编译upload到Arduino UNO上了。
ROS上位机开发
- 配置你的机器人参数,进入配置文件目录
$ roscd ros_arduino_python/config
- 拷贝一份新的配置文件
$ cp arduino_params.yaml my_arduino_params.yaml
- 用nano打开编辑
sudo nano my_arduino_params.yaml
- 修改后的my_arduino_params.yaml如下图
- 主要修改就是启用base Controller,修改PID参数,修改机器人的参数:
# For a direct USB cable connection, the port name is typically
# /dev/ttyACM# where is # is a number such as 0, 1, 2, etc
# For a wireless connection like XBee, the port is typically
# /dev/ttyUSB# where # is a number such as 0, 1, 2, etc.
port: /dev/ttyACM0
baud: 57600
timeout: 0.1
rate: 50
sensorstate_rate: 10
use_base_controller: True
base_controller_rate: 10
# For a robot that uses base_footprint, change base_frame to base_footprint
base_frame: base_link
# === Robot drivetrain parameters
wheel_diameter: 0.02900 #轮胎直径
wheel_track: 0.18 #两个轮胎间距
encoder_resolution: 2 # 码盘孔数
gear_reduction: 75.0 #转速比
motors_reversed: True
# === PID parameters
Kp: 10
Kd: 12
Ki: 0
Ko: 50
accel_limit: 1.0
# === Sensor definitions. Examples only - edit for your robot.
# Sensor type can be one of the follow (case sensitive!):
# * Ping
# * GP2D12
# * Analog
# * Digital
# * PololuMotorCurrent
# * PhidgetsVoltage
# * PhidgetsCurrent (20 Amp, DC)
sensors: {
#motor_current_left: {pin: 4, type: PololuMotorCurrent, rate: 5},
#motor_current_right: {pin: 7, type: PololuMotorCurrent, rate: 5},
#ir_front_center: {pin: 2, type: GP2D12, rate: 10},
#sonar_front_center: {pin: 5, type: Ping, rate: 10},
arduino_led: {pin: 13, type: Digital, rate: 5, direction: output}
}
- 修改完成后,既可以运行了
运行测试
- 新终端,启动roscore
$ roscore
- 新终端,增加路径到bash
$ source ~/catkin_ws/devel/setup.bash
- 新终端,启动节点
$ roslaunch ros_arduino_python arduino.launch
- 启动效果图:

- 新终端,发布Twist消息来控制机器人的运行,如:
$ rostopic pub /cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
- 运行此命令,机器人会原地打转,用如下命令查看odom的信息,此信息会不断的变化
- 新终端,查看里程
$ rostopic echo /odom
- 效果图:

- 至此机器人已经可以按照Twist消息进行控制,发布功move base使用的odom信息
- 不过做到这里,为了控制精度,我们还需要标定机器人,即标定机器人按照机器人给定的线速度,和角速度行进
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号