



















ROS与计算机视觉-利用OpenDroneMap进行3D建模
ROS与计算机视觉-利用OpenDroneMap进行3D建模
说明:
- 介绍如何利用OpenDroneMap和WebODM进行3D建模
- 基于ubuntu18.04
OpenDroneMap/WebODM介绍:
- OpenDroneMap 是一個開源的航拍影象處理工具,可以把航拍影象進行點雲、正射影像和高程模型等轉換處理。
- WebODM 全称为 Web OpenDroneMap,顾名思义,它就是 OpenDroneMap 的 Web 界面版本
- 相比于 OpenDroneMap 命令行界面,同样的图像处理功能,WebODM 搭载在让人感到亲切的 UI 操作界面,用户体验更好了。
- WebODM 处理后能生成多种结果,包括点云、GeoTIFF 等,可在 Web 界面做长度、面积等的测试或展示,更有利于 GIS 分析研究
步骤:
- 安装docker
$ sudo apt update
$ curl -fsSL https://get.docker.com -o get-docker.sh
$ sh get-docker.sh
$ sudo apt install -y git python python-pip
- 检查docker版本
$ docker-compose --version
- 如果上面命令没安装,执行安装
$ sudo pip install docker-compose
- 下载
cd ~/tools/
$ git clone https://github.com/OpenDroneMap/WebODM
$ cd WebODM
$ sudo ./webodm.sh start
- 如果提示错误
Couldn't connect to Docker daemon at http+docker://localunixsocket
- 用户没有权限,增加sudo就可以
- 访问地址
http://localhost:8000
- 关闭
$sudo ./webodm.sh stop
- 其他命令
$ ./webodm.sh start
$ ./webodm.sh stop
$ ./webodm.sh start --port 80
# Restart WebODM (useful if things get stuck)
$ ./webodm.sh restart
# Reset the admin user's password if you forget it
$ ./webodm.sh resetadminpassword newpass
# Update everything to the latest version
$ ./webodm.sh update
# Store processing results in the specified folder instead of the default location (inside docker)
$ ./webodm.sh restart --media-dir /path/to/webodm_results
# See all options
$ ./webodm.sh --help
测试:
- 下载数据集,https://github.com/OpenDroneMap/ODMdata
mkdir -p ~/tools/WebODM/dataset
cd ~/tools/WebODM/dataset
git clone https://github.com/OpenDroneMap/odm_data_bellus
- 打开网站http://localhost:8000
- 效果图:

- 第一次打开,输入注册一个账号和密码,分别输入webodm
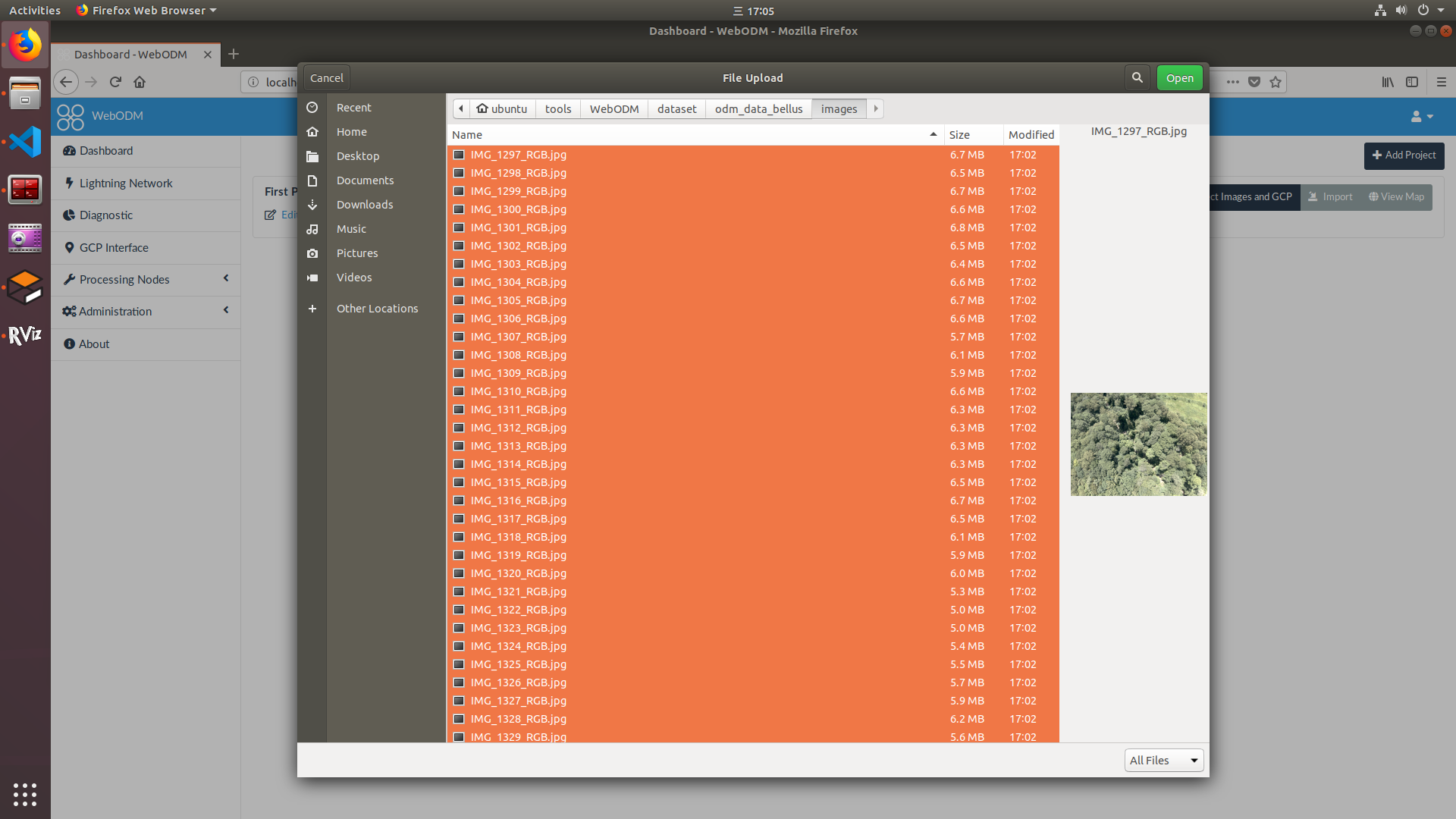
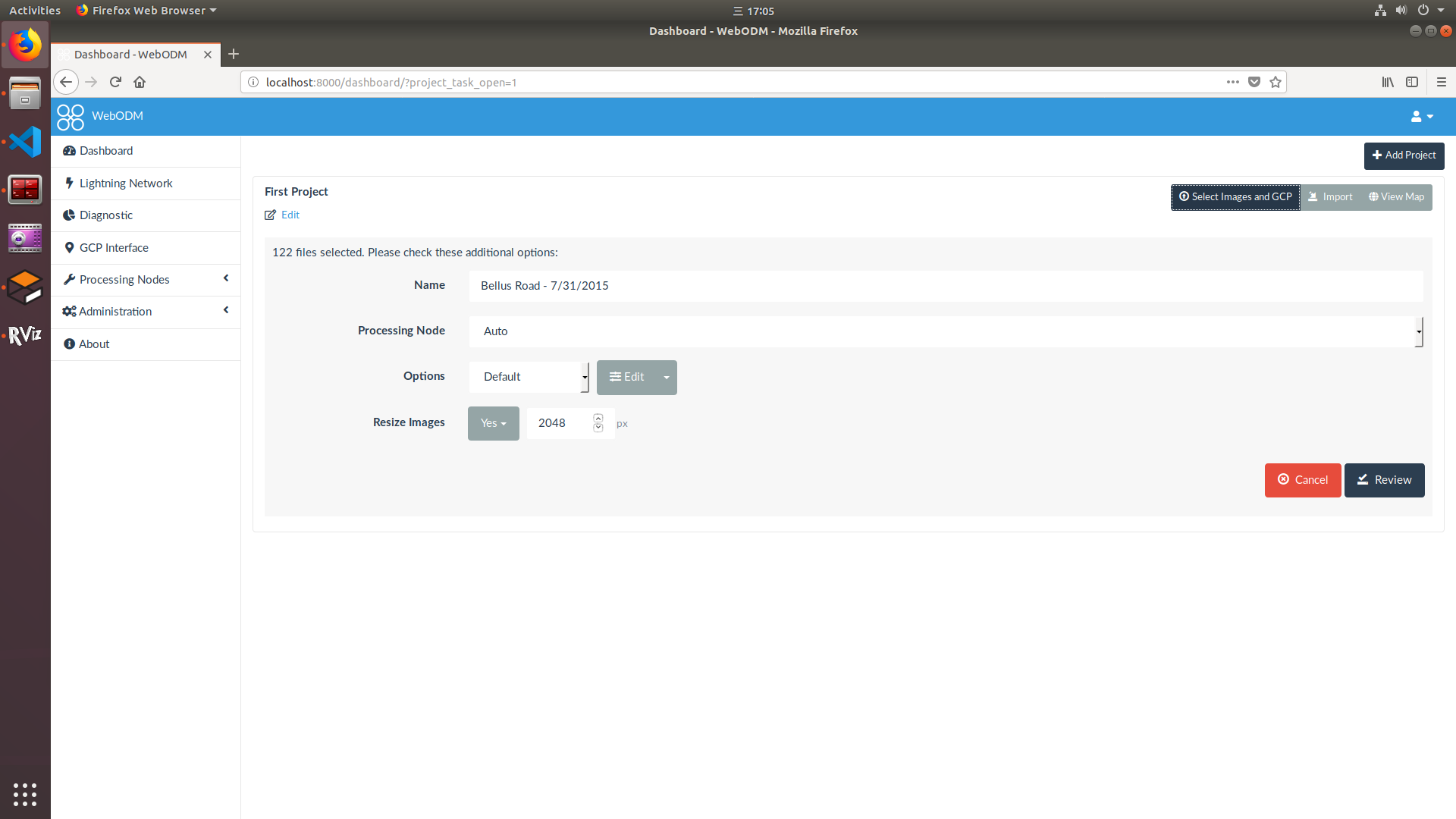
- 默认会自动有一个测试项目建立,点击select Image and gcp,选择对应对应图片
- 再点review,最后点processing,等待处理结果,根据你图片的数量,需要等待一段时间。
- 处理结束后,可以点击查看结果,选择下载对应的格式的文件

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号