



















ROS与激光雷达入门教程-ROS中使用激光雷达(Neato XV-11)
ROS与激光雷达入门教程-ROS中使用激光雷达(Neato XV-11)
说明
- 介绍激光雷达(Neato XV-11)
- 介绍在ROS中使用激光雷达
激光雷达(Neato XV-11)
Neato XV-11激光雷达主要来自Neato牌子的扫地机,多为二手。
激光雷达内部图示:

激光雷达安装图示:

数据参数:
- 串口通讯: 速率 115200 8N1
- 雷达每完整旋转一周会发送90个数据包
- 每个数据包中包含4个测量点的信息
- 每个数据包长度固定是22个字节
- 360°旋转一周共 1980个字节,相当于每度会有一个距离数据.
雷达的数据包格式:
<start> <index> <speed_l> <speed_h> [Data 0] [Data 1] [Data 2] [Data 3] <checksum_l> <checksum_h>雷达的数据包分析:
:0xFA,是固定格式表明数据包开始,可用来从数据流中分割数据包。 :数据包的索引号,范围从0xA0 到 0xF9 (总共89个包,每个包4个数据)。 :有两个speedL和speedH ,它们各一个字节,共同组成转速信息,大概是低6bit表示小数部分。 - :[ Data 0] 到 [Data 3] 是四组测量数据,其中每组测量数据分别由4个字节组成,如下:
- byte 0 : <distance 7:0=""> # 距离信息的0-7位
- byte 1 : <“invalid data” flag> <“strength warning” flag> <distance 13:8=""> # 错误信息标志位 , 警告位, 距离信息13-8位byte 2 : <signal strength="" 7:0=""> # 信号强度 0-7位
- byte 3 : <signal strength="" 15:8=""> # 讯号强度 8-15位
距离信息的单位是mm ,整个激光雷达的测量范围大概是15cm 到6m, 只需要把距离信息的两个字节组装成一个整数即可(注意判断无效数据位为0,如果为1意味是无效的数据,需丢弃)。 :由两个字节组成的校验码,用来校验整个数据包是否正确
驱动安装前准备
- 假设本测试在Ubuntu 14.04 + Indigo下进行
- 激光雷达的驱动:https://github.com/ncnynl/xv_11_laser_driver
驱动安装
- 进入工作空间,下载代码,编译
$ cd ~/catkin_ws/src
$ git clone https://github.com/ncnynl/xv_11_laser_driver.git
$ cd ../
$ catkin_make
激光雷达配置
- 查看端口,采用指定端口方式。一般都是ttyUSB0,查看端口方法:
$ ls /dev/ttyUSB*
/dev/ttyUSB0 /dev/ttyUSB1
- 配置端口,采用别名方式:
- 连接雷达后,查看雷达端口,获取idVendor和idProduct信息。ID后面的数字idVendor:idProduct
$ lsusb
Bus 001 Device 006: ID 138a:0011 Validity Sensors, Inc. VFS5011 Fingerprint Reader
- 新建 /etc/udev/rules.d/rplidar.rules文件:(设置别名为neatolaser,实际名称为:/dev/neatolaser)
KERNEL=="ttyUSB*", ATTRS{idVendor}=="138a", ATTRS{idProduct}=="0011", MODE:="0666", GROUP:="dialout", SYMLINK+="neatolaser"
- 增加当前用户对串口的默认访问权限:
$ sudo usermod -a -G dialout 用户名
- 使UDEV配置生效:(使串口的默认访问权限生效,需要重启机器)
$ sudo service udev reload
$ sudo service udev restart
激光雷达测试
- 新开端口, 导入环境变量:
$ source ~/catkin_ws/devel/setup.bash
- 新开端口,启动roscore
$ roscore
- 新开端口,测试使用的是版本2,
注意:不同版本数据格式有差异。
$ rosrun xv_11_laser_driver neato_laser_publisher _port:=/dev/ttyUSB0 _firmware_version:=2
- 或使用别名
$ rosrun xv_11_laser_driver neato_laser_publisher _port:=/dev/neatolaser _firmware_version:=2
- 或利用launch启动, 修改端口
<param name="port" value="/dev/ttyUSB0" />或用/dev/neatolaser
$ roslaunch xv_11_laser_driver neato.launch
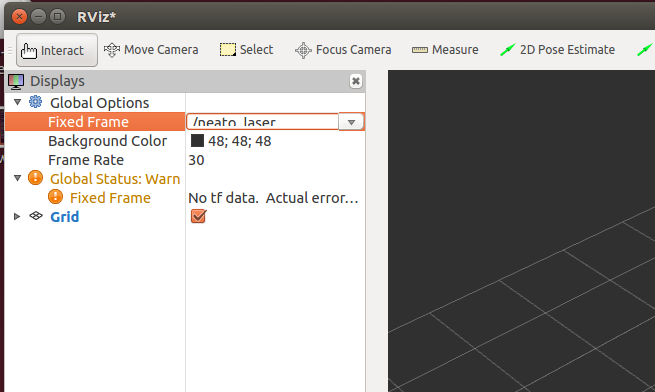
- 打开RVIZ
$ rosrun rviz rviz

- 修改Global Options的Fixed Frame为/neato_laser(手打),如图:
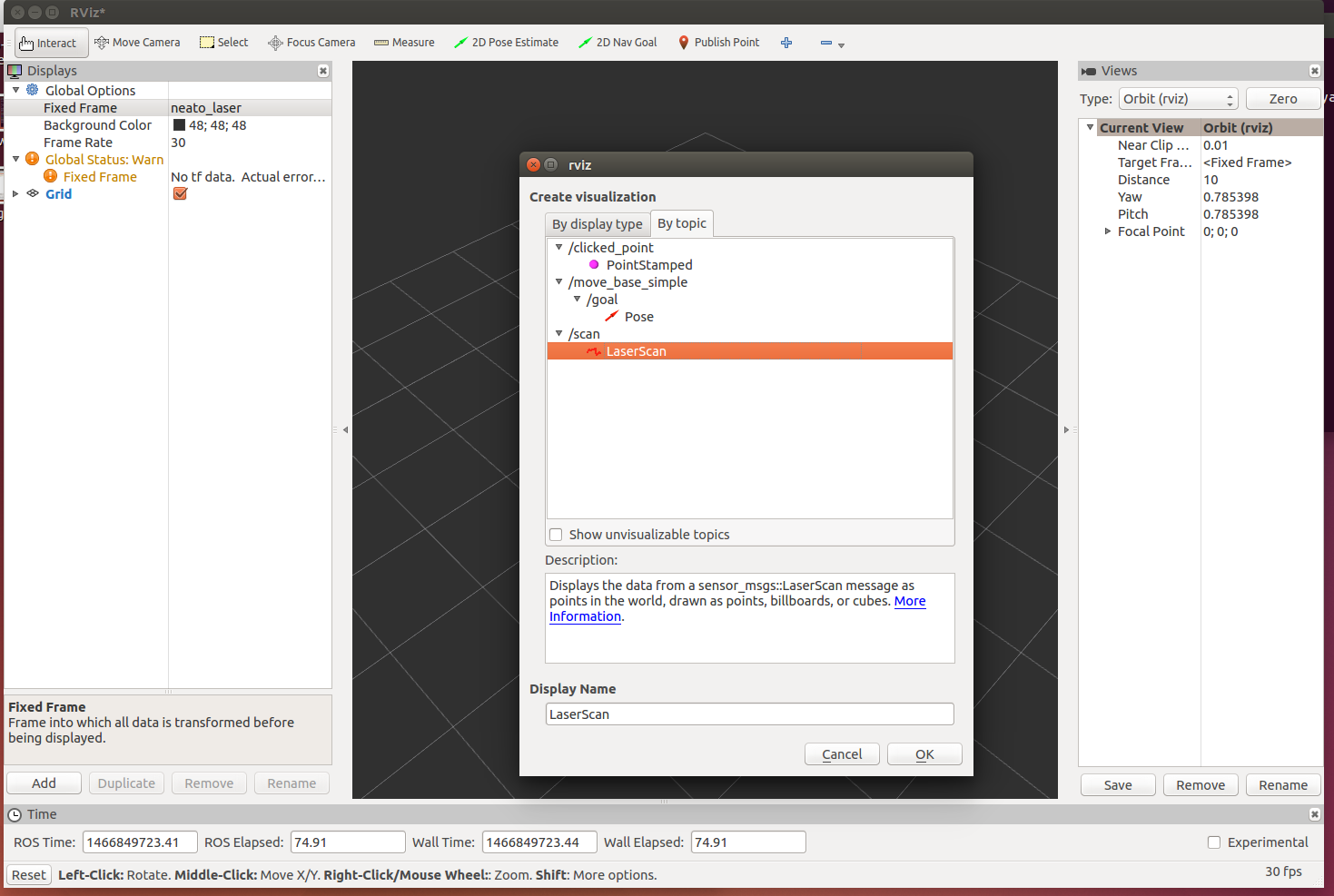
- 点击Add,添加LaserScan,可以看到点云数据,如果没看到,旋转雷达的开关,调整速度。
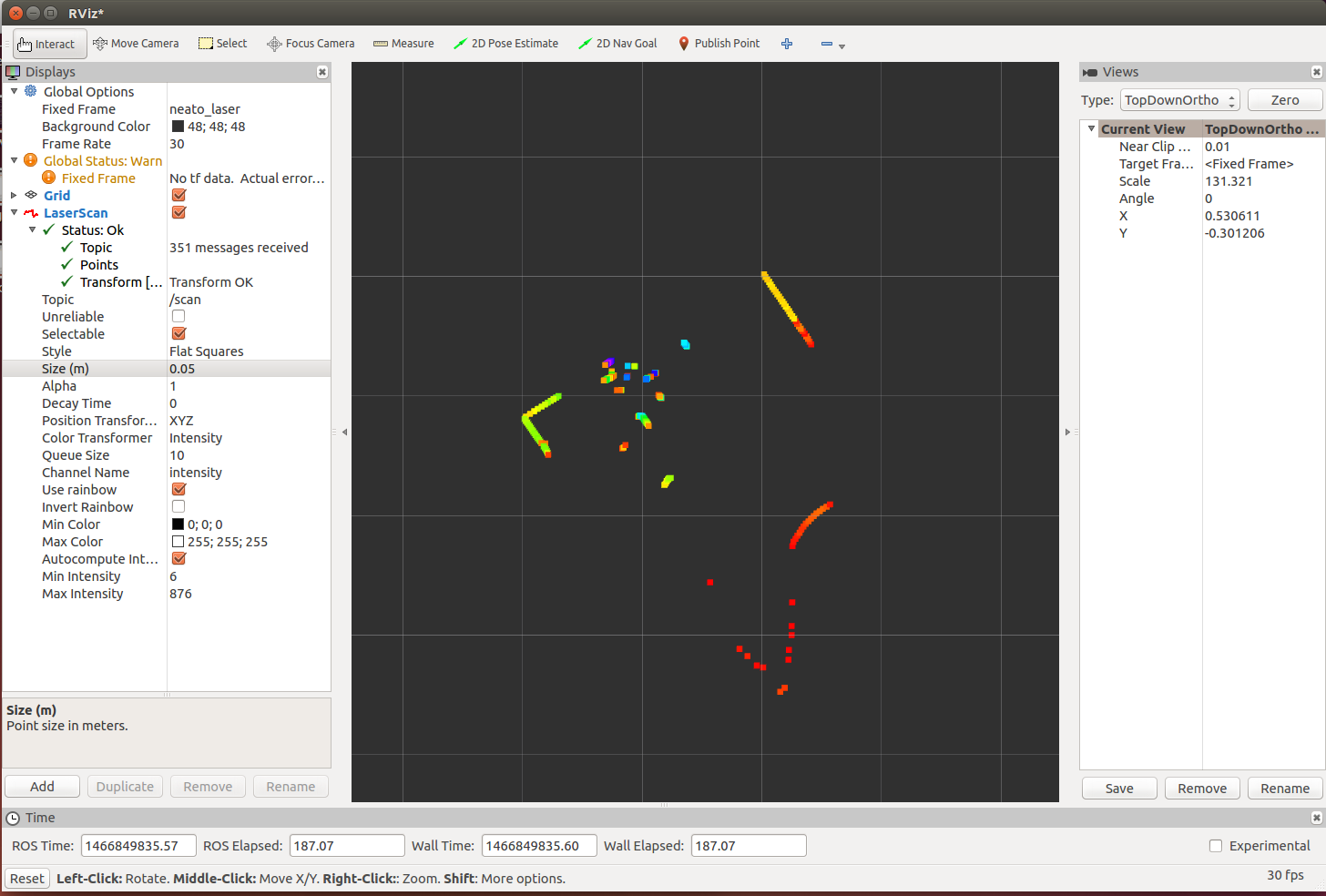
- 可能显示的点云很小,调整下大小size(m)为0.05,如图:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号