



















ROS与Arduino-BlinkM指南
BlinkM指南
说明
- BlinkM是非常小的LED灯,适合作为机器人的指示灯
- BlinkM是I2C控制的多颜色的LED灯
- 这个教程展示通过Arduino和rosserial控制BlinkM的多色闪亮或作为固定色的指示灯。
硬件
- Arduino
- BlinkM (BlinkM datasheet , Diagram from the BlinkM datasheet)
连接图
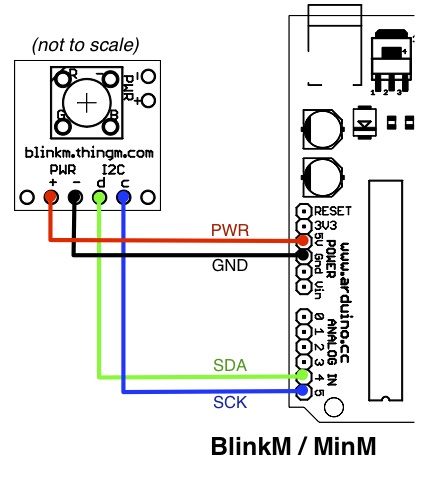
- BlinkM 需要连接到5V, GND, 和Arduino的I2C SDA 和SCL
代码
/*
* RosSerial BlinkM Example
* This program shows how to control a blinkm
* from an arduino using RosSerial
*/
#include "WProgram.h" //include the Arduino library
#include <stdlib.h>
#include <ros.h>
#include <std_msgs/String.h>
//include Wire/ twi for the BlinkM
#include <Wire.h>
extern "C" {
#include "utility/twi.h"
}
#include "BlinkM_funcs.h"
const byte blinkm_addr = 0x09; //default blinkm address
void setLED( bool solid, char color)
{
if (solid)
{
switch (color)
{
case 'w': // white
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0xff,0xff,0xff);
break;
case 'r': //RED
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0xff,0,0);
break;
case 'g':// Green
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0,0xff,0);
break;
case 'b':// Blue
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0,0,0xff);
break;
case 'c':// Cyan
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0,0xff,0xff);
break;
case 'm': // Magenta
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0xff,0,0xff);
break;
case 'y': // yellow
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0xff,0xff,0);
break;
default: // Black
BlinkM_stopScript( blinkm_addr );
BlinkM_fadeToRGB( blinkm_addr, 0,0,0);
break;
}
}
else
{
switch (color)
{
case 'r': // Blink Red
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 3,0,0 );
break;
case 'w': // Blink white
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 2,0,0 );
break;
case 'g': // Blink Green
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 4,0,0 );
break;
case 'b': // Blink Blue
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 5,0,0 );
break;
case 'c': //Blink Cyan
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 6,0,0 );
break;
case 'm': //Blink Magenta
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 7,0,0 );
break;
case 'y': //Blink Yellow
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 8,0,0 );
break;
default: //OFF
BlinkM_stopScript( blinkm_addr );
BlinkM_playScript( blinkm_addr, 9,0,0 );
break;
}
}
}
void light_cb( const std_msgs::String& light_cmd){
bool solid =false;
char color;
if (strlen( (const char* ) light_cmd.data) ==2 ){
solid = (light_cmd.data[0] == 'S') || (light_cmd.data[0] == 's');
color = light_cmd.data[1];
}
else{
solid= false;
color = light_cmd.data[0];
}
setLED(solid, color);
}
ros::NodeHandle nh;
ros::Subscriber<std_msgs::String> sub("blinkm" , light_cb);
void setup()
{
pinMode(13, OUTPUT); //set up the LED
BlinkM_beginWithPower();
delay(100);
BlinkM_stopScript(blinkm_addr); // turn off startup script
setLED(false, 0); //turn off the led
nh.initNode();
nh.subscribe(sub);
}
void loop()
{
nh.spinOnce();
delay(1);
}
- 以上代码位于Arduino IDE, File->Examples->ros_lib->blinkm
- 节点订阅主题blinkm 消息类型为std_msgs/String
- 在回调函数,节点传递命令去决定那种颜色或是否点亮
- blinkm颜色有red (r), blue (b), magenta(m), green(g), white(w), cyan(c), and yellow(y)
- 如命令带有'S' or 's' LED 则为固定的颜色
- BlinkM I2C地址为默认的设置
- 如果重新编译或使用多个BlinkM即要更改这个地址
测试
- 新窗口打开
$ roscore
- 新窗口打开,/dev/ttyUSB0为Arduino设备端口号
$ rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0
- 点亮红色
$ rostopic pub blinkm std_msgs/String "br"
- 点亮蓝色
$ rostopic pub blinkm std_msgs/String "sb"
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号