



















MoveIt!入门教程-RViz插件
MoveIt!入门教程-RViz插件
说明
- 这是MoveIt的RViz插件,用于生成机器人的场景,生成计划,可视化输出,以及与机器人直接交互。
要求
- 完成配置助手教程
- 有一个PR2的MoveIt配置文件包
- 假设你的配置文件包名为 “pr2_moveit_config”.
- 或者,你可以安装已经配置好的
sudo apt-get install ros-indigo-moveit-pr2
- 教程不需要你有一个PR2,只是利用一系列机器人PR2的相关模型文件
运行步骤:
- 启动demo.launch文件和配置插件
roslaunch pr2_moveit_config demo.launch
- 第一次启动需要配置 Motion Planning
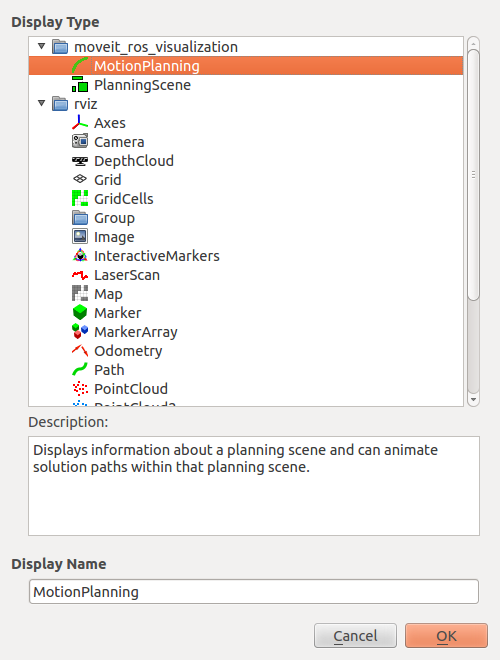
在Rviz Displays 选项卡,点add
从moveit_ros_visualization目录,选择MotionPlanning作为DisplayType,点OK.效果图如下:
在“Global Options” 选项 “Displays” 子窗口, 设置Fixed Frame 为“/odom_combined”
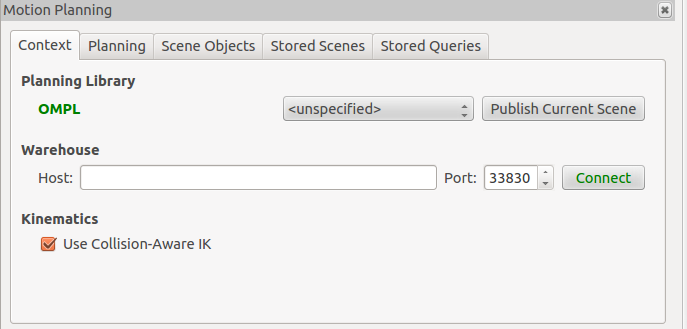
现在,你可以开始为你的机器人配置插件(目前是PR2)点击 “MotionPlanning” 后面的“Displays”.
- 确保Robot Description设置为“robot_description”
- 确保Planning Scene Topic设置为“planning_scene”.
- 在Planning Request, 改变组为 “right_arm”.
- 在Planned path里设置Trajectory Topic 为 “/move_group/display_planned_path”.
效果图:

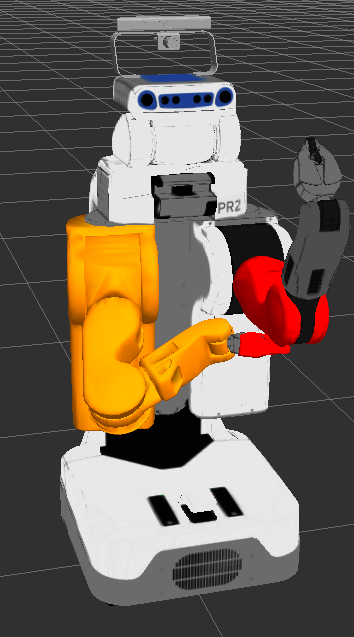
- 配置可视化机器人
这里有四个不同的可视化活动
- 运动规划的开始状态(计划组显示为绿色)
- 运动规划的目标状态(计划组显示为橙色)。
- 在规划场景/规划环境机器人的配置
- 机器人的规划路径
显示状态可以通过是否打勾复选框进行开或关
- 在“Planning Request” 选项卡,开始状态使用“Query Start State”复选框
- 在“Planning Request” 选项卡,目标状态使用“Query Goal State”复选框
- 在 “Scene Robot”选项卡,规划场景机器人使用“Show Scene Robot”复选框
- 在“Planned Path” 选项卡,规划路径使用“Show Robot Visual”复选框
效果图如下:

应用所有这些选项去开或关得到不同的可视化效果
- 与PR2交互
- 按下Rviz顶部的"Interact" . 你应该看到多个交互标记显示在PR2的右臂
- 一个橙色的标记的右臂用于设置行为规划的目标状态。另一个绿色的标记的右臂设置为开始状态
- 您将能够使用这些标记(这是连接到每个手臂的前端链接)拖动手臂周围,并改变其方向。
- 移动到发生碰撞
注意:当你尝试将一个手臂与另一个碰撞时会发生什么情况。在碰撞中的两个环节会变红。
效果图:
“使用冲突感知IK”复选框允许您切换IK解算器的行为。当复选框打勾,求解器将试图找到一个理想的末端执行器的位姿自由冲突的解决。当它未打勾,求解器将允许发生碰撞。在碰撞环节始终还是会显示红色。
效果图:
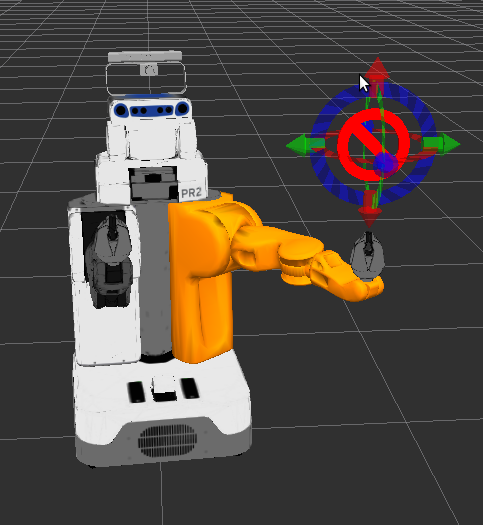
- 移动不可到达的工作区
- 注意:当你试图将一个末端执行器移动到不能到达的工作区(有时候禁止标记不会出现)时会发生什么情况。
- 效果图:
- 在PR2里使用行为规划
现在可以使用MoveIt的Rviz插件在PR2上进行行为规划
- 移动开始状态到希望的位置
- 移动目标状态到另一个希望的位置
- 确保状态不会与机器人产生冲突
- 确保路径规划能可视化,在Planned Path选项卡上检查“Show Trail”复选框
在Motion Planning的planning选项卡,按下Plan 按钮,应该看到手臂移动并显示它的轨迹。
效果图:

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号