



















turtlebot入门-语音控制
PocketSphinx语音识别和turtlebot的语音控制
说明
- 利用PocketSphinx实现语音识别
- 利用语音命令来控制Turtlebot
- 实现播放语音
PocketSphinx语音识别
- 安装PocketSphinx
$ sudo apt-get install gstreamer0.10-pocketsphinx
$ sudo apt-get install ros-indigo-pocketsphinx
$ sudo apt-get install ros-indigo-audio-common
$ sudo apt-get install libasound2
$ sudo apt-get install gstreamer0.10-gconf(有些书本没有说要安装,但经过在indigo版本测试,必须安装)
- 测试PocketSphinx 语音识别
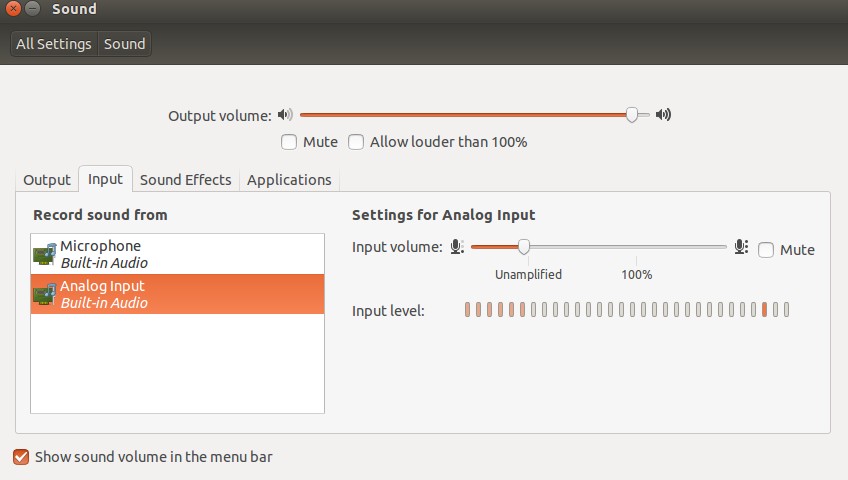
设置麦克风设备,系统设置->sound中input设置内置语音音量, 插入麦克风设备,在系统设置里测试麦克风是否有语音输入
启动launch文件:
$ roslaunch pocketsphinx robocup.launch
尝试说一些简单的语句,当然,必须是英语,例如:bring me the glass,come with me,看看能不能识别出来
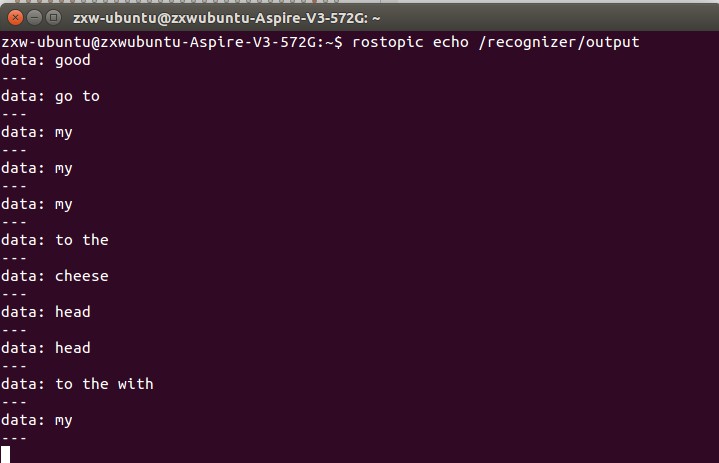
直接看ROS最后发布的结果消息:
$ rostopic echo /recognizer/output
- 效果图:
- 添加语音库
- 这个语音识别是属于离线识别,将一些常用的词汇放到一个文件中,作为识别的文本库,然后分段识别语音信号,最后在库中搜索对应的文本信息。如果想看语音识别库中有哪些文本信息,可以通过下面的指令进行查询:
$ roscd pocketsphinx/demo
$ more robocup.corpus
添加语音库。 我们可以自己向语音库中添加其他的文本识别信息《ros by example》自带的例程中是带有语音识别的例程的,而且有添加语音库的例子。
安装《ros by example》例子环境依赖
$cd ~
$wget https://raw.githubusercontent.com/pirobot/rbx1/indigo-devel/rbx1-prereq.sh
$sh rbx1-prereq.sh
- 安装例子代码
$cd ~/catkin_ws/src
$git clone https://github.com/pirobot/rbx1.git
$cd rbx1
$git checkout indigo-devel
$cd ~/catkin_ws
$catkin_make
$source ~/catkin_ws/devel/setup.bash
$rospack profile
- 首先看看例子中要添加的文本息:
$ roscd rbx1_speech/config
$ more nav_commands.txt
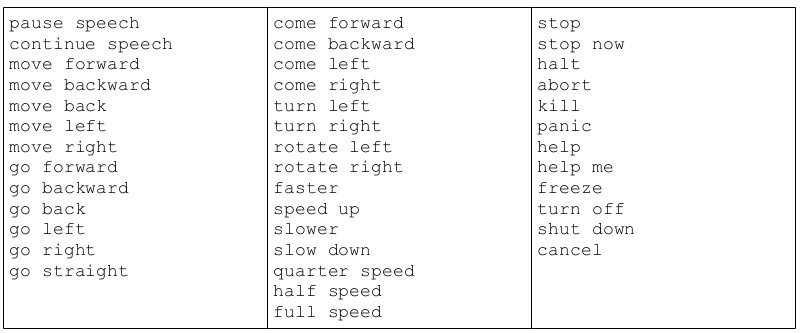
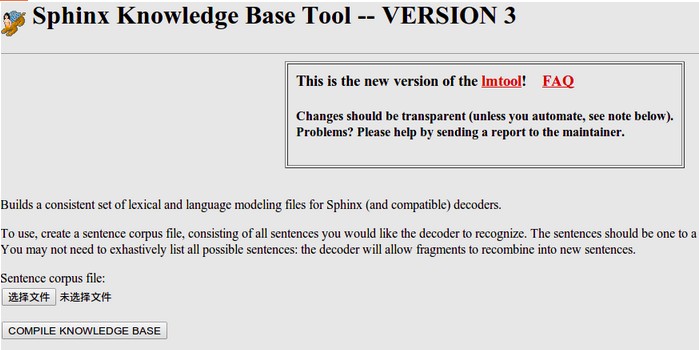
以下是需要添加的文本,我们也可以修改其中的某些文本,改成自己需要的。然后我们要把这个文件在线生成语音信息和库文件,这一步需要登陆网站http://www.speech.cs.cmu.edu/tools/lmtool-new.html,根据网站的提示上传文件,然后在线编译生成库文件。
把下载的文件都解压放在rbx1_speech包的config文件夹下。我们可以给这些文件改个名字
$ roscd rbx1_speech/config
$ rename -f 's/3026/nav_commands/'
- 在rbx1_speech/launch文件夹下看看voice_nav_commands.launch这个文件
<launch>
<node name="recognizer" pkg="pocketsphinx" type="recognizer.py"
output="screen">
<param name="lm" value="$(find rbx1_speech)/config/nav_commands.lm"/>
<param name="dict" value="$(find rbx1_speech)/config/nav_commands.dic"/>
</node>
</launch>
- 这个launch文件在运行recognizer.py节点的时候使用了我们生成的语音识别库和文件参数,这样就可以实用我们自己的语音库来进行语音识别了。通过之前的命令来测试一下效果如何吧:
$ roslaunch rbx1_speech voice_nav_commands.launch
$ rostopic echo /recognizer/output
语音控制turtlrbot机器人移动
- recognizer.py会将最后识别的文本信息通过消息发布,那么我们来编写一个机器人控制节点接收这个消息,进行相应的控制即可。在pocketsphinx包中本身有一个语音控制发布Twist消息的例程voice_cmd_vel.py,rbx1_speech包对其进行了一些简化修改,在nodes文件夹里可以查看voice_nav.py文件
#!/usr/bin/env python
"""
voice_nav.py - Version 1.1 2013-12-20
Allows controlling a mobile base using simple speech commands.
Based on the voice_cmd_vel.py script by Michael Ferguson in
the pocketsphinx ROS package.
See http://www.ros.org/wiki/pocketsphinx
"""
import rospy
from geometry_msgs.msg import Twist
from std_msgs.msg import String
from math import copysign
class VoiceNav:
def __init__(self):
rospy.init_node('voice_nav')
rospy.on_shutdown(self.cleanup)
# Set a number of parameters affecting the robot's speed
self.max_speed = rospy.get_param("~max_speed", 0.4)
self.max_angular_speed = rospy.get_param("~max_angular_speed", 1.5)
self.speed = rospy.get_param("~start_speed", 0.1)
self.angular_speed = rospy.get_param("~start_angular_speed", 0.5)
self.linear_increment = rospy.get_param("~linear_increment", 0.05)
self.angular_increment = rospy.get_param("~angular_increment", 0.4)
# We don't have to run the script very fast
self.rate = rospy.get_param("~rate", 5)
r = rospy.Rate(self.rate)
# A flag to determine whether or not voice control is paused
self.paused = False
# Initialize the Twist message we will publish.
self.cmd_vel = Twist()
# Publish the Twist message to the cmd_vel topic
self.cmd_vel_pub = rospy.Publisher('cmd_vel', Twist, queue_size=5)
# Subscribe to the /recognizer/output topic to receive voice commands.
rospy.Subscriber('/recognizer/output', String, self.speech_callback)
# A mapping from keywords or phrases to commands
self.keywords_to_command = {'stop': ['stop', 'halt', 'abort', 'kill', 'panic', 'off', 'freeze', 'shut down', 'turn off', 'help', 'help me'],
'slower': ['slow down', 'slower'],
'faster': ['speed up', 'faster'],
'forward': ['forward', 'ahead', 'straight'],
'backward': ['back', 'backward', 'back up'],
'rotate left': ['rotate left'],
'rotate right': ['rotate right'],
'turn left': ['turn left'],
'turn right': ['turn right'],
'quarter': ['quarter speed'],
'half': ['half speed'],
'full': ['full speed'],
'pause': ['pause speech'],
'continue': ['continue speech']}
rospy.loginfo("Ready to receive voice commands")
# We have to keep publishing the cmd_vel message if we want the robot to keep moving.
while not rospy.is_shutdown():
self.cmd_vel_pub.publish(self.cmd_vel)
r.sleep()
def get_command(self, data):
# Attempt to match the recognized word or phrase to the
# keywords_to_command dictionary and return the appropriate
# command
for (command, keywords) in self.keywords_to_command.iteritems():
for word in keywords:
if data.find(word) > -1:
return command
def speech_callback(self, msg):
# Get the motion command from the recognized phrase
command = self.get_command(msg.data)
# Log the command to the screen
rospy.loginfo("Command: " + str(command))
# If the user has asked to pause/continue voice control,
# set the flag accordingly
if command == 'pause':
self.paused = True
elif command == 'continue':
self.paused = False
# If voice control is paused, simply return without
# performing any action
if self.paused:
return
# The list of if-then statements should be fairly
# self-explanatory
if command == 'forward':
self.cmd_vel.linear.x = self.speed
self.cmd_vel.angular.z = 0
elif command == 'rotate left':
self.cmd_vel.linear.x = 0
self.cmd_vel.angular.z = self.angular_speed
elif command == 'rotate right':
self.cmd_vel.linear.x = 0
self.cmd_vel.angular.z = -self.angular_speed
elif command == 'turn left':
if self.cmd_vel.linear.x != 0:
self.cmd_vel.angular.z += self.angular_increment
else:
self.cmd_vel.angular.z = self.angular_speed
elif command == 'turn right':
if self.cmd_vel.linear.x != 0:
self.cmd_vel.angular.z -= self.angular_increment
else:
self.cmd_vel.angular.z = -self.angular_speed
elif command == 'backward':
self.cmd_vel.linear.x = -self.speed
self.cmd_vel.angular.z = 0
elif command == 'stop':
# Stop the robot! Publish a Twist message consisting of all zeros.
self.cmd_vel = Twist()
elif command == 'faster':
self.speed += self.linear_increment
self.angular_speed += self.angular_increment
if self.cmd_vel.linear.x != 0:
self.cmd_vel.linear.x += copysign(self.linear_increment, self.cmd_vel.linear.x)
if self.cmd_vel.angular.z != 0:
self.cmd_vel.angular.z += copysign(self.angular_increment, self.cmd_vel.angular.z)
elif command == 'slower':
self.speed -= self.linear_increment
self.angular_speed -= self.angular_increment
if self.cmd_vel.linear.x != 0:
self.cmd_vel.linear.x -= copysign(self.linear_increment, self.cmd_vel.linear.x)
if self.cmd_vel.angular.z != 0:
self.cmd_vel.angular.z -= copysign(self.angular_increment, self.cmd_vel.angular.z)
elif command in ['quarter', 'half', 'full']:
if command == 'quarter':
self.speed = copysign(self.max_speed / 4, self.speed)
elif command == 'half':
self.speed = copysign(self.max_speed / 2, self.speed)
elif command == 'full':
self.speed = copysign(self.max_speed, self.speed)
if self.cmd_vel.linear.x != 0:
self.cmd_vel.linear.x = copysign(self.speed, self.cmd_vel.linear.x)
if self.cmd_vel.angular.z != 0:
self.cmd_vel.angular.z = copysign(self.angular_speed, self.cmd_vel.angular.z)
else:
return
self.cmd_vel.linear.x = min(self.max_speed, max(-self.max_speed, self.cmd_vel.linear.x))
self.cmd_vel.angular.z = min(self.max_angular_speed, max(-self.max_angular_speed, self.cmd_vel.angular.z))
def cleanup(self):
# When shutting down be sure to stop the robot!
twist = Twist()
self.cmd_vel_pub.publish(twist)
rospy.sleep(1)
if __name__=="__main__":
try:
VoiceNav()
rospy.spin()
except rospy.ROSInterruptException:
rospy.loginfo("Voice navigation terminated.")
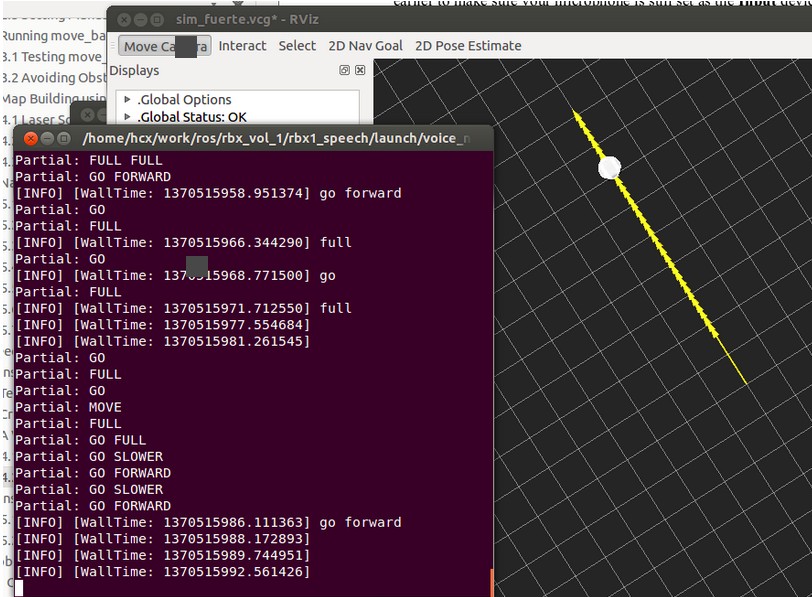
- 仿真测试
$ roslaunch rbx1_bringup fake_turtlebot.launch 首先是运行一个机器人模型:
$ rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz 然后打开rviz:
$ roslaunch rbx1_speech voice_nav_commands.launch 再打开语音识别的节点:
$ roslaunch rbx1_speech turtlebot_voice_nav.launch 最后就是机器人的控制节点了:
- 效果图,不过语音的准确度还是有欠缺。
实现播放语音
- 可以通过语音控制Turtlebot, 也可以让Turtlebot实现播放相应的文字内容,运行下面的命令:
$ rosrun sound_play soundplay_node.py
$ rosrun sound_play say.py "Greetings Humans. Take me to your leader."
- ROS通过识别我们输入的文本,让机器人读了出来。发出这个声音的人叫做kal_diphone,我们也可以换一个人来读
$ sudo apt-get install festvox-don
$ rosrun sound_play say.py "Welcome to the future" voice_don_diphone
- 在rbx1_speech/nodes文件夹中有一个让机器人说话的节点talkback.py
#!/usr/bin/env python
"""
talkback.py - Version 0.1 2012-01-10
Use the sound_play client to say back what is heard by the pocketsphinx recognizer.
Created for the Pi Robot Project: http://www.pirobot.org
Copyright (c) 2012 Patrick Goebel. All rights reserved.
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 2 of the License, or
(at your option) any later version.5
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details at:
http://www.gnu.org/licenses/gpl.htmlPoint
"""
import roslib; roslib.load_manifest('rbx1_speech')
import rospy
from std_msgs.msg import String
from sound_play.libsoundplay import SoundClient
import sys
class TalkBack:
def __init__(self, script_path):
rospy.init_node('talkback')
rospy.on_shutdown(self.cleanup)
# Set the default TTS voice to use
self.voice = rospy.get_param("~voice", "voice_don_diphone")
# Set the wave file path if used
self.wavepath = rospy.get_param("~wavepath", script_path + "/../sounds")
# Create the sound client object
self.soundhandle = SoundClient()
# Wait a moment to let the client connect to the
# sound_play server
rospy.sleep(1)
# Make sure any lingering sound_play processes are stopped.
self.soundhandle.stopAll()
# Announce that we are ready for input
self.soundhandle.playWave(self.wavepath + "/R2D2a.wav")
rospy.sleep(1)
self.soundhandle.say("Ready", self.voice)
rospy.loginfo("Say one of the navigation commands...")
# Subscribe to the recognizer output and set the callback function
rospy.Subscriber('/recognizer/output', String, self.talkback)
def talkback(self, msg):
# Print the recognized words on the screen
rospy.loginfo(msg.data)
# Speak the recognized words in the selected voice
self.soundhandle.say(msg.data, self.voice)
# Uncomment to play one of the built-in sounds
#rospy.sleep(2)
#self.soundhandle.play(5)
# Uncomment to play a wave file
#rospy.sleep(2)
#self.soundhandle.playWave(self.wavepath + "/R2D2a.wav")
def cleanup(self):
self.soundhandle.stopAll()
rospy.loginfo("Shutting down talkback node...")
if __name__=="__main__":
try:
TalkBack(sys.path[0])
rospy.spin()
except rospy.ROSInterruptException:
rospy.loginfo("Talkback node terminated.")
- 运行talkback.launch
$ roslaunch rbx1_speech talkback.launch
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号