



















ROS探索总结-9.操作杆控制
操作杆控制
对于移动机器人,键盘的控制往往满足不了我们的需求,以前看好多电影里边都是用一个摇杆来控制机器人的,简直帅爆了,正好我这里有一个操作杆,那就来尝试感受一下。
操作杆(joystick)控制会更加有操作感,ROS中的很多机器人也带有操作杆的相关代码,只需要简单的移植即可。我们使用的是赛钛客(saitek)的一款操作杆,如下图所示:

使用的移植代码是clearpath_husky机器人中的python代码。
参考链接: http://www.ros.org/wiki/joy
一、测试操作杆驱动
首先将操作杆的接口插入电脑,然后在终端中输入:
ls /dev/input/
显示如下:

其中的js0就代表我们的操作杆。然后测试操作杆的操作是否有效,输入:
sudo jstest /dev/input/js0
然后会在终端中显示操作杆的各个控制值的即时值,操作操作杆,如果每个按键和操作都有效,说明操作杆是正常的。最后在ROS中的节点里进行测试。打开joy节点:
rosrun joy joy_node
再打开一个窗口,输入下面命令,查看数据:
rostopic echo joy
操作操作杆,窗口下面的数据就开始刷新。
二、控制代码
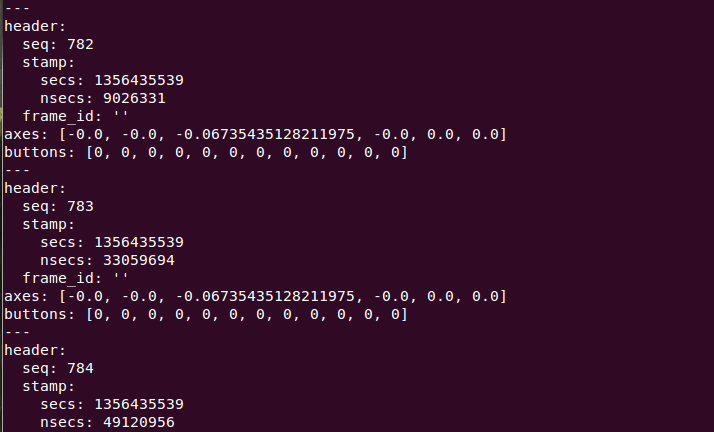
从上面的测试中,我们发现在前后左右摇动操作杆时,相应改变的数据是Axes中0号和1号位的数据,也是我们最常用的数据,其他按键对应的位置也可以找到,编程的时候就是利用的这些数据位置,所以一定要找到每个按键的对应编号。
ROS中已经为我们建立了操作杆的数据结构:
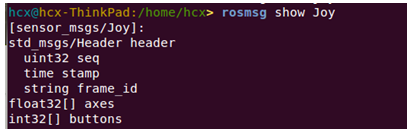
我们主要用到的就是axes和buttons数据。最终的代码如下:
import roslib; roslib.load_manifest('smartcar_teleop')
import rospy
from sensor_msgs.msg import Joy
from geometry_msgs.msg import Twist
from std_msgs.msg import String
class Teleop:
def __init__(self):
rospy.init_node('smartcar_teleop_joy')
self.turn_scale = rospy.get_param('~turn_scale')
self.drive_scale = rospy.get_param('~drive_scale')
self.deadman_button = rospy.get_param('~deadman_button', 0)
self.cmd = None
cmd_pub = rospy.Publisher('cmd_vel', Twist)
announce_pub = rospy.Publisher('/smartcar/announce/teleops',
String, latch=True)
announce_pub.publish(rospy.get_namespace());
rospy.Subscriber("joy", Joy, self.callback)
rate = rospy.Rate(rospy.get_param('~hz', 20))
while not rospy.is_shutdown():
rate.sleep()
if self.cmd:
cmd_pub.publish(self.cmd)
def callback(self, data):
""" Receive joystick data, formulate Twist message. """
cmd = Twist()
cmd.linear.x = data.axes[1] * self.drive_scale
cmd.angular.z = data.axes[0] * self.turn_scale
if data.buttons[self.deadman_button] == 1:
self.cmd = cmd
else:
self.cmd = None
if __name__ == "__main__": Teleop()
三、机器人控制
首先来创建一个launch文件(teleop_joy.launch):
<launch>
<arg name="drive_speed" default="1.0" />
<arg name="turn_speed" default="1.0" />
<arg name="joy_dev" default="/dev/input/js0" />
<arg name="cmd_topic" default="cmd_vel" />
<node pkg="joy" type="joy_node" name="joy_node">
<param name="dev" value="$(arg joy_dev)" />
<param name="deadzone" value="0.3" />
</node>
<node pkg="smartcar_teleop" type="teleop_joy.py" name="smartcar_teleop">
<param name="turn_scale" value="$(arg turn_speed)" />
<param name="drive_scale" value="$(arg drive_speed)" />
<remap from="cmd_vel" to="$(arg cmd_topic)" />
</node>
</launch>
在rviz中打开我们的机器人模型,然后打开操作杆的控制节点:
roslaunch smartcar_display.rviz.launch
roslaunch smartcar_teleop teleop_joy.launch
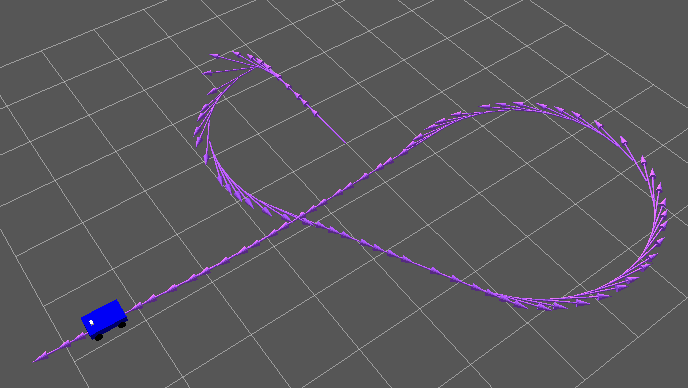
然后按住刹车键进行操作,机器人就可以开始移动了:
在新终端中输入:
rostopic echo joy
可以查看到实时的操作杆控制数据:
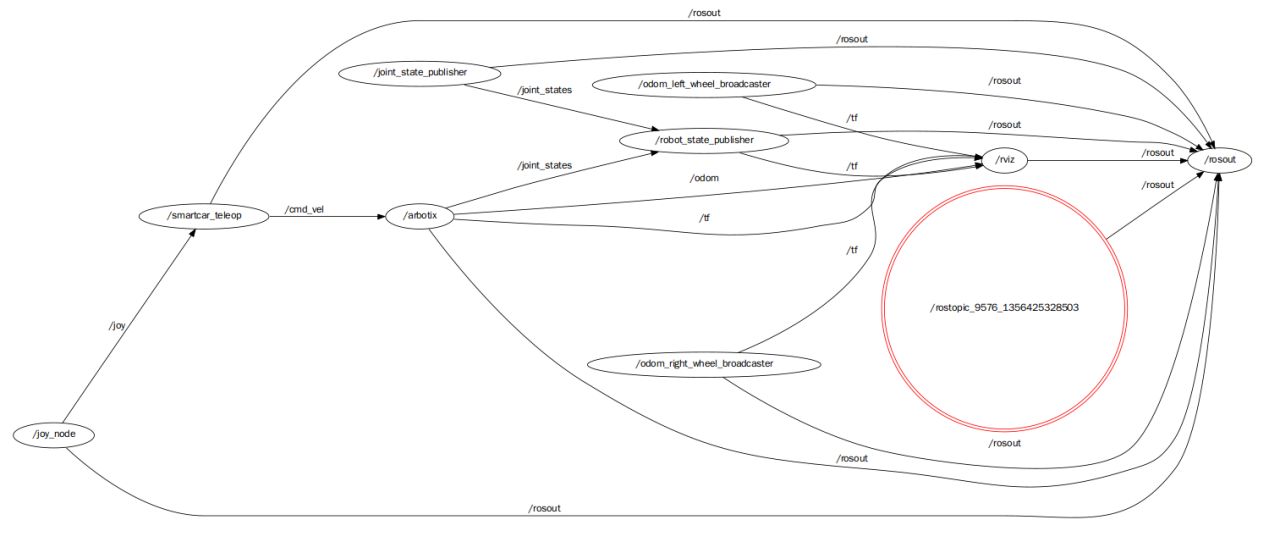
四、节点关系图
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号