



















ROS探索总结-7.smartcar源码上传
smartcar源码上传
- 修改版:2016-10-13 by ncnynl
看到前面写的博客还是帮助了很多ROS的学习者,我感到非常荣幸。其实我也是一名ROS的新手,ROS的相关资料少,上手难度大,我现在也在摸索着学习,还希望大家都将自己的学习成果在网上或者ROS群里分享。
我看到有些人在运行我前面写的smartcar程序,为了方便大家的学习,我这两天整理了一下代码,已经上传到csdn上,下载请见:
http://download.csdn.net/detail/hcx25909/5487985
或者
http://file.ncnynl.com/ros/smartcar.zip 下载
注意:修改的indigo版本:
http://file.ncnynl.com/ros/smartcar_description_indigo_ncnynl.com.tar.gz 下载
注意事项
- 代码的内容主要是前边用到的机器人smartcar的urdf文件,已经运行使用的launch文件,大家下载后可以直接编译使用,由于代码在我的计算机上编译时带有路径信息,所以大家编译的时候请使用下面的命令先清除再编译:
rosmake smartcar_description --pre-clean
注意:indigo版本用catkin编译:
$ cd ~/catkin_ws/
$ catkin_make
代码中的urdf文件里室机器人的urdf描述,和上一篇博客中讲的是一样的,launch文件夹中主要有以下文件:
第一个实在gazebo仿真中用到的,需要先运行gazebo,然后再运行。但是貌似有问题,我每次加载到gazebo中的时候似乎物理参数不对,机器人在gazebo里飞来飞去的,至今还没有解决。如果哪位仁兄发现问题了,还请多多指教。
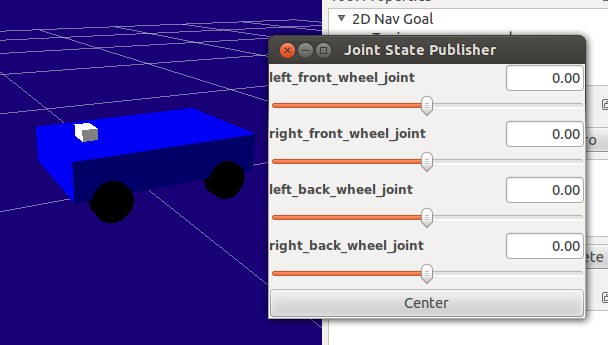
第二个文件是我在绘制模型的时候用到的,主要功能是在rviz中显示机器人模型,文件中的以下代码:
<arg name="gui" default="false" />如果把false改为true,则会打开一个gui的调试界面,可以通过滑动条旋转车轮,如下图所示。默认是false。
第三个文件是在方针的时候用到的,就是前面博客中使用的,会打开arbotix仿真器。
根目录中还有rviz的配置文件urdf.vcg,只要大家在rviz中修改界面或者参数,推出的时候保存,就会自动修改这个文件了。
config文件夹下的是仿真用到的配置文件。
PS:代码中还有很多问题,请大家多多指教,共同进步。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号