



















Turtlebot仿真-编写第一个交互
编写第一个交互
- 在这节课我们将把该应用的用户侧。
- 我们将学习如何在应用程序列表中添加跟随者应用程序。
先决条件
- 这节课是上一节课的延续:“多turtlebots互动”。如果你没有做过这一课,先做吧。
创造互动
- 在my_rapps创建文件夹。
cd ~/my_ws/src/my_rapps/
mkdir interactions
cd ineractions
2。创建 my.interactions文件以下内容:
- name: ""
role: My Interactions
compatibility: rocon:/pc/*/hydro|indigo/precise|quantal|raring|saucy|trusty
display_name: Follower
description: Take the TurtleBot for a stroll. TurtleBot will follow whatever is in front of it.
max: -1
icon:
resource_name: my_rapps/follower_bubble_icon.png
pairing:
rapp: my_rapps/follower
remappings: []
修改concert_service_gazebo包
- 克隆concert_services。
cd ~/my_ws/src/
git clone https://github.com/robotics-in-concert/concert_services.git
- 改变目录。
cd ~/my_ws/src/concert_services/
- 改变分支。
git checkout indigo
- 编辑robot.launch文件。
cd concert_service_gazebo/launch/
- 在参数
robot_concert_whitelist下面, 在include标签上面,添加robot_interactions和robot_interactions_list:
<arg name="robot_interactions" default="false"/>
<arg name="robot_interactions_list" default="[]"/>
- 在concert_whitelist下面,include标签里面添加interactions 和interactions_list。
<arg name="interactions" value="$(arg robot_interactions)"/>
<arg name="interactions_list" value="$(arg robot_interactions_list)"/>
- 编辑gazebo_robot_manager.py文件。
cd ~/my_ws/src/concert_services/concert_service_gazebo/src/concert_service_gazebo/
- 增加2个字符串,在_prepare_rocon_launch_text函数:
launch_text += ' <arg name="robot_interactions" value="%s"/>\n' % robot['interactions']
launch_text += ' <arg name="robot_interactions_list" value="%s"/>\n' % str(robot['interactions_list'])
- 在此字符串上
launch_text += ' </launch>'
- 我们编辑这个文件为使用robot_interactions和robot_interactions_list参数。
修改gazebo_concert包
- 编辑gazebo.parameters文件。
cd ~/my_ws/src/rocon_tutorials/concert_tutorials/gazebo_concert/solutions/
- 为每个机器人添加interactions 和interactions_list参数。
interactions: true
interactions_list: [turtlebot_bringup/documentation.interactions, my_rapps/my.interactions]
- 编译包。
source /opt/ros/indigo/setup.bash
cd ~/my_ws/
catkin_make
运行的追随应用程序
- 改变路径。
source ~/my_ws/devel/setup.bash
- 启动gazebo_concert。
roslaunch gazebo_concert concert.launch
- 你会看到这些字符串在每个机器人终端。
[INFO] [WallTime: 1456371595.581037] [10.320000] Interactions : loading Follower [-My Interactions-/]
- 开始rocon_remocon。
rocon_remocon
- 选择 Gazebo Concert->User->Gazebo Viewer。
- 你会看到熟悉的Gazebo世界。
在Interactions Chooser选择Concert Teleop 。
选择资源列表中gamza1捕获。
在一个新的终端开始rocon_remocon。
rocon_remocon
- 按添加。编辑
MASTER_URI。
MASTER_URI = http://localhost:11412
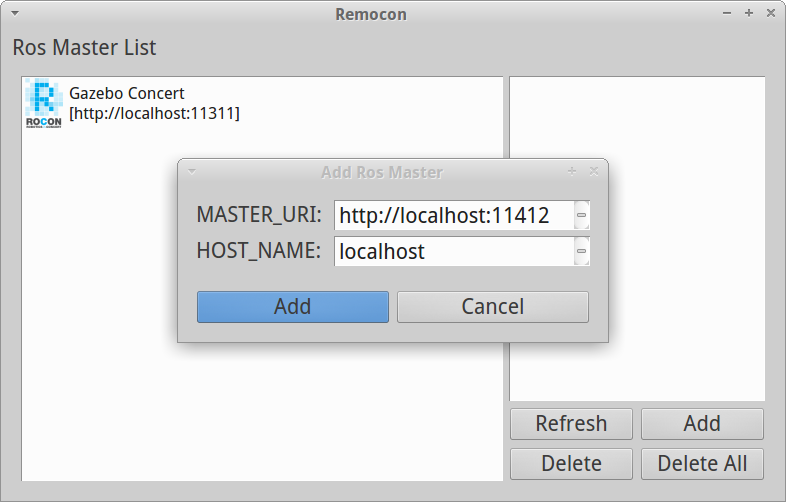
按添加。你会看到gamza2
选择gamza2.
选择My Interactions.
- 选择Follower.
操作gamza1使用操纵杆进行跟随行为。
中断进程。关闭窗口。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号