



















Turtlebot仿真-Turtlebot跟随
Turtlebot跟随
- 在本课中我们将推出turtlebot跟随演示。
- 我们将启动两turtlebots在Gazebo Concert,让第二台Turtlebot跟随第一台Turtlebot。
先决条件
这节课是上一节课的延续:“多Turtlebot互动”。如果您没有从先决条件部分做说明,你应该先做他们。
我们将用
tutlebot_follower包。
2.1 更改目录。
cd ~/my_ws/src
2.2克隆turtlebot_apps库。
git clone https://github.com/nampi/turtlebot_apps.git
- 注:我们将使用这个存储库,直到这个拉请求将被合并。
- 原来是https://github.com/turtlebot/turtlebot_apps库。
2.3 更改目录。
cd turtlebot_apps
2.4 改变Git分支。
git checkout simul
- 这个跟随的仿真应用在
simul分支。
- 建立包。
source /opt/ros/indigo/setup.bash
cd ~/my_ws/
catkin_make
如果你有一个错误,然后用CATKIN_IGNORE除turtlebot_follower包。
touch /home/<your_name>/my_ws/src/turtlebot_apps/software/pano/pano_core/CATKIN_IGNORE
touch /home/<your_name>/my_ws/src/turtlebot_apps/software/pano/pano_ros/CATKIN_IGNORE
touch /home/<your_name>/my_ws/src/turtlebot_apps/software/pano/pano_py/CATKIN_IGNORE如果你运行catkin_make,它将忽略catkin_ignore文件目录的任何包。
启动Turtlebot 跟随
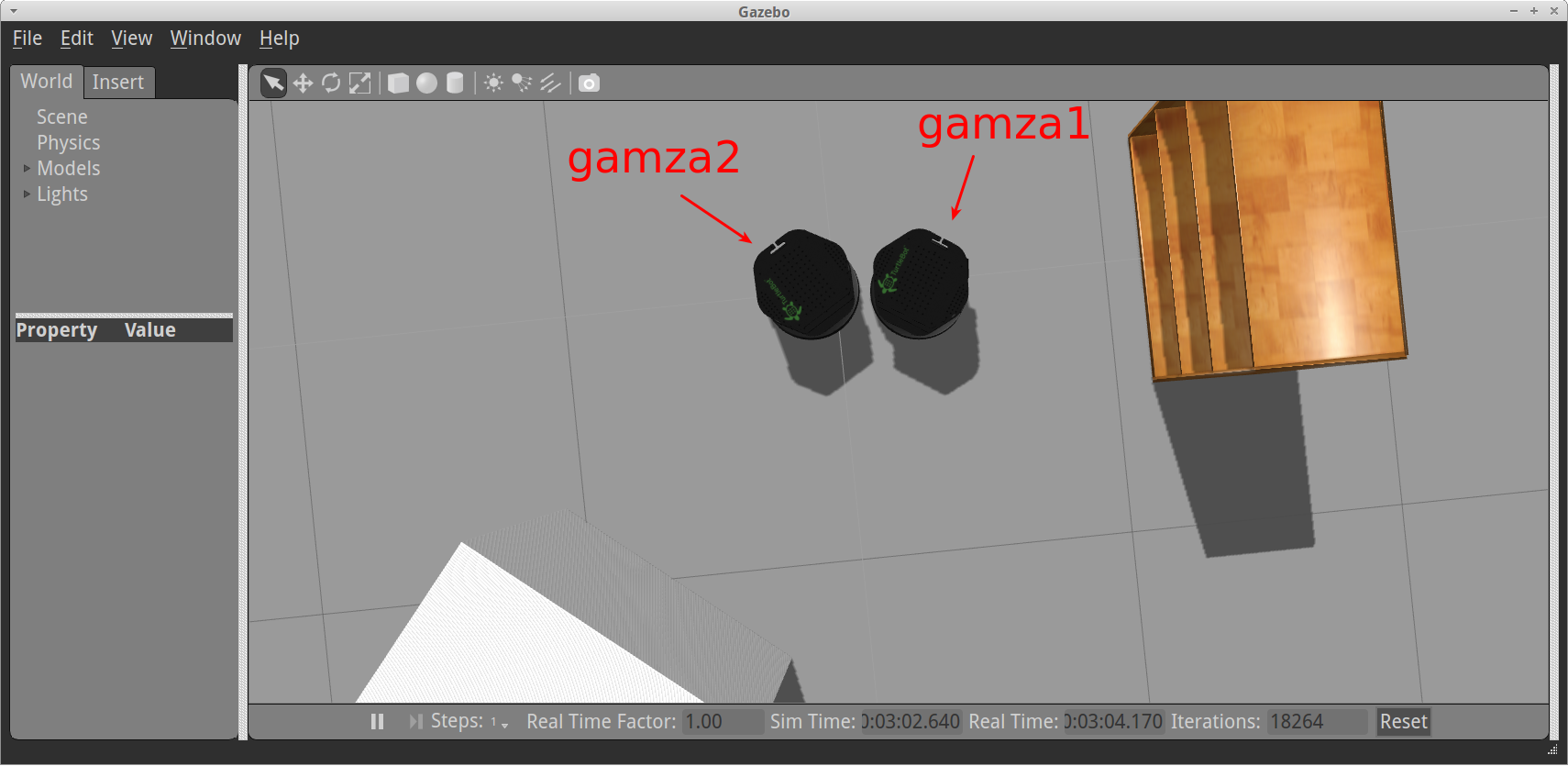
- turtlebot命名
gamza1将控制使用操纵杆,turtlebot命名gamza2将跟随gamza1。
- 启动Gazebo Concert (从以前1-10的步骤)。
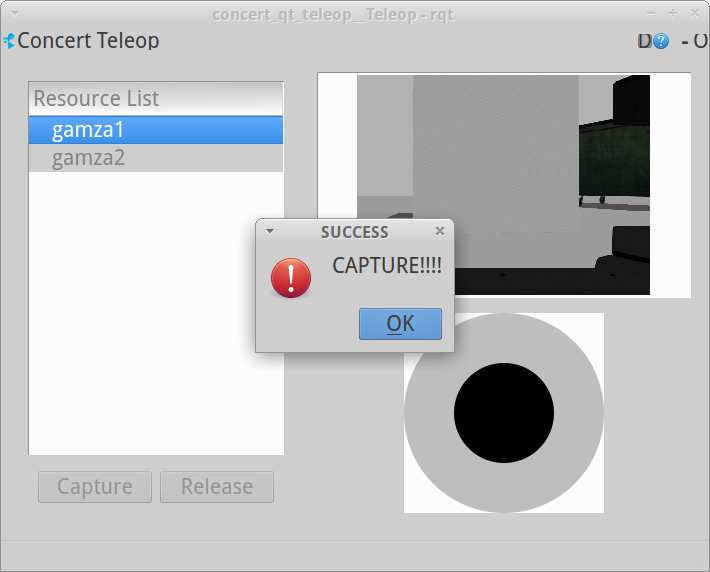
- 选择资源列表中gamza1捕获。
- 打开一个新的终端,并改变路径。
source ~/my_ws/devel/setup.bash
- 启动turtlebot_follower演示。
roslaunch turtlebot_follower follower.launch simulation:=true __ns:=gamza2
- 注:__ns是替代ROS_NAMESPACE。
- 你可以找到维基ROS的更多信息。
- 启动后,
gamza1必须在前面的gamza2。
- 使用操纵杆放在前面的gamza2驱动gamza1。
- 在gamza2识别gamza1,gamza2试图将观察对象的中心直接在自己前面走一个固定的距离。
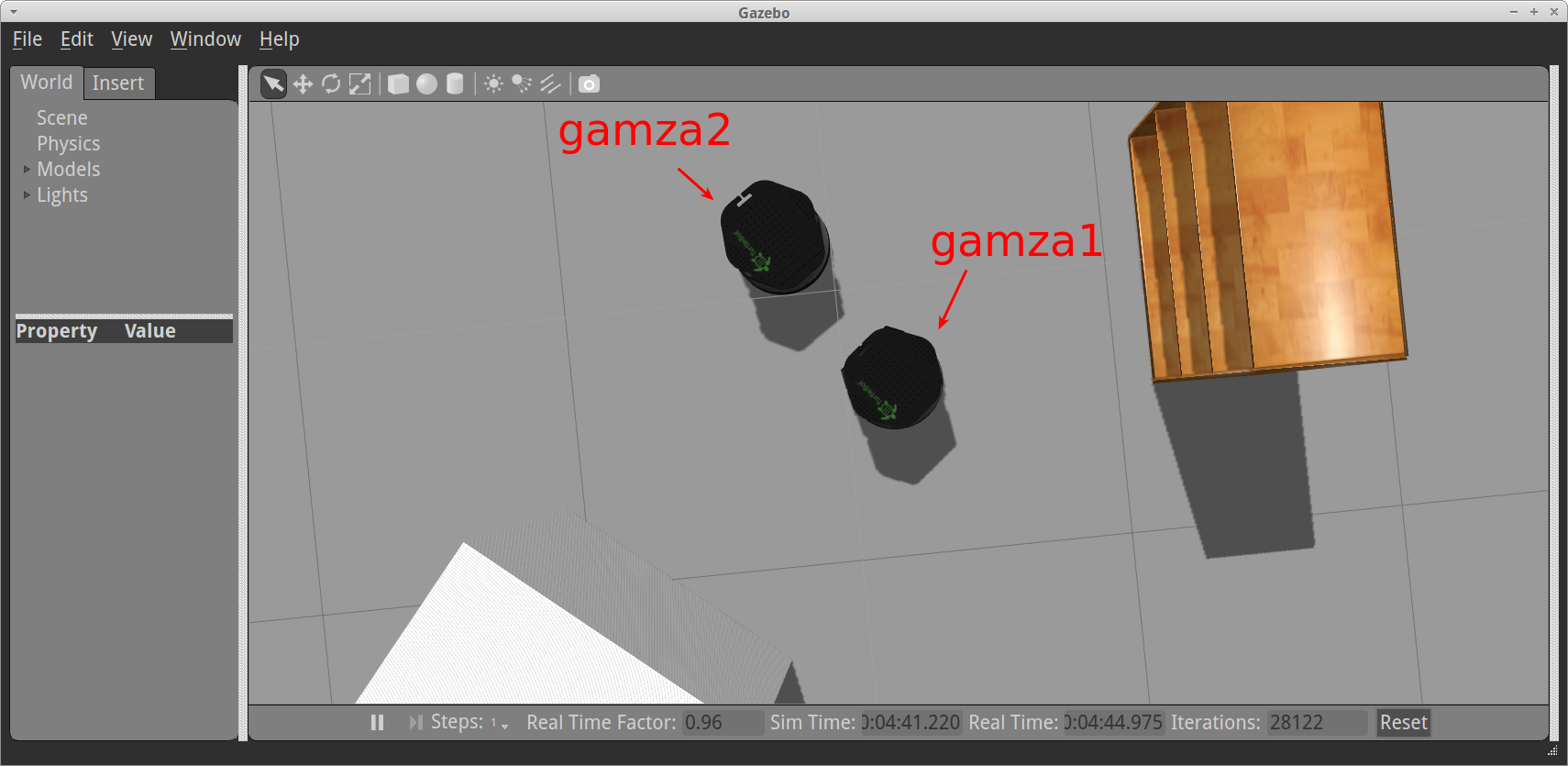
- 如果gamza1非常接近gamza2,然后gamza2会倒退走。
- 如果他们之间的距离远是那么gamza2会前进。
- 你应该让gamza1慢慢移动。
- 如果你gamza1移动太快,然后gamza2将失去迷失而停止
- 注:其他对象可以混淆的追随者。你应该避免他们。
- 中断进程。关闭窗口。
- 你可以找到关于维基ROS turtlebot_follower包的更多信息。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号