



















Turtlebot仿真-多Turtlebot互动
多Turtlebot互动
- 在这节课我们将学习如何推出两turtlebots同时在模拟世界。
- 我们将在演唱会计划使用机器人。
先决条件
- 安装软件包。
sudo apt-get install ros-indigo-turtlebot-concert
sudo apt-get install ros-indigo-gazebo-concert
sudo apt-get install ros-indigo-rocon-remocon
sudo apt-get install ros-indigo-concert-services
- 在教程中,我们将使用一些标准包的修改。
- 让我们创建一个工作区。
mkdir -p ~/my_ws/src/
- 我们将使用一个
gazebo_concert包提供替代参数。
3.1 更改目录。
cd ~/my_ws/src
3.2 克隆rocon_tutorial库。
git clone https://github.com/robotics-in-concert/rocon_tutorials.git
3.3 更改目录.
cd rocon_tutorials
3.4 改变分支。
git checkout indigo
3.5 更改目录。
cd concert_tutorials/gazebo_concert/solutions/
3.6 gazebo.parameters文件编辑。
- 我们要同时启动两turtlebot。
- 这是一个新的
gazebo.parameters文件。
robots:
- name: gamza1
type: turtlebot
robot_rapp_whitelist: [rocon_apps, turtlebot_rapps]
location: [0.0, 0.2, 0.0]
- name: gamza2
type: turtlebot
robot_rapp_whitelist: [rocon_apps, turtlebot_rapps]
location: [0.0, 0.0, 0.0]
world_file: concert_service_gazebo/playground.world
- 建立包。
4.1 记得要源码你的环境设置文件。
source /opt/ros/indigo/setup.bash
4.2 更改目录catkin 工作区。
cd ~/my_ws/
4.3 使用catkin_make。
catkin_make
启动Gazebo Concert
- 源设置文件。
source ~/my_ws/devel/setup.bash
- 注意:命令只在这个终端上更改路径。
- 启动gazebo_concert。
roslaunch gazebo_concert concert.launch
- 开始rocon_remocon。
rocon_remocon
- 你会看到这个图:
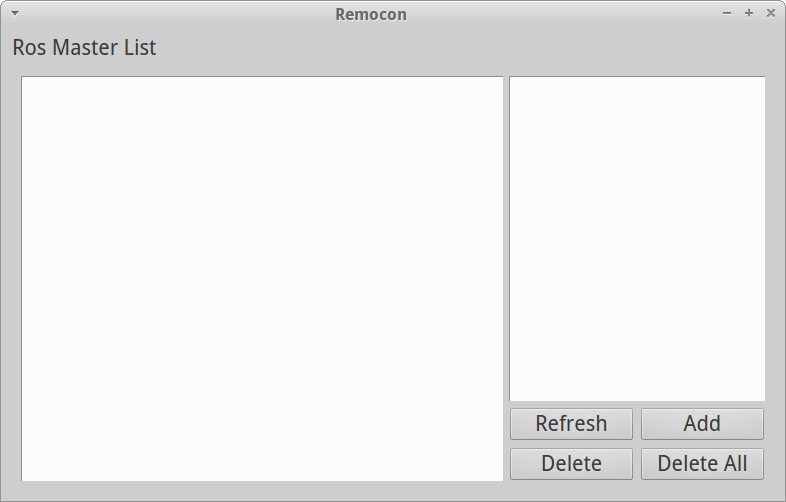
- 按
Add.编辑MASTER_URI.
MASTER_URI: http://localhost:11311
- 按 Add. 你会看到ROS master
Gazebo Concert.
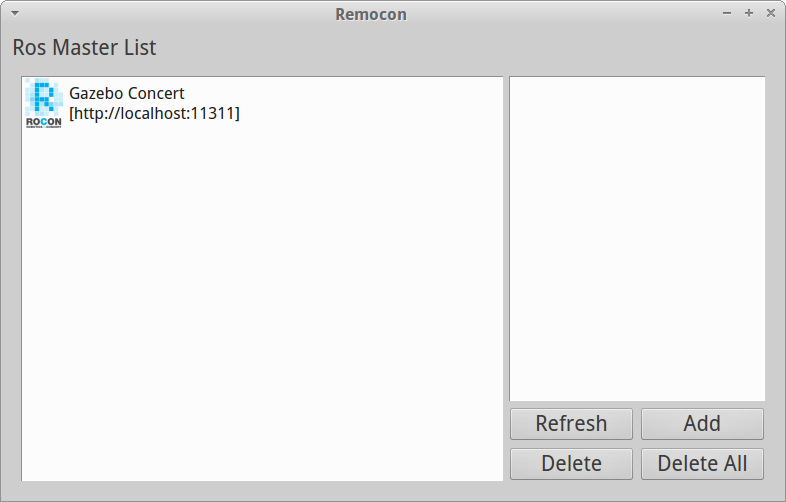
按 Refresh.
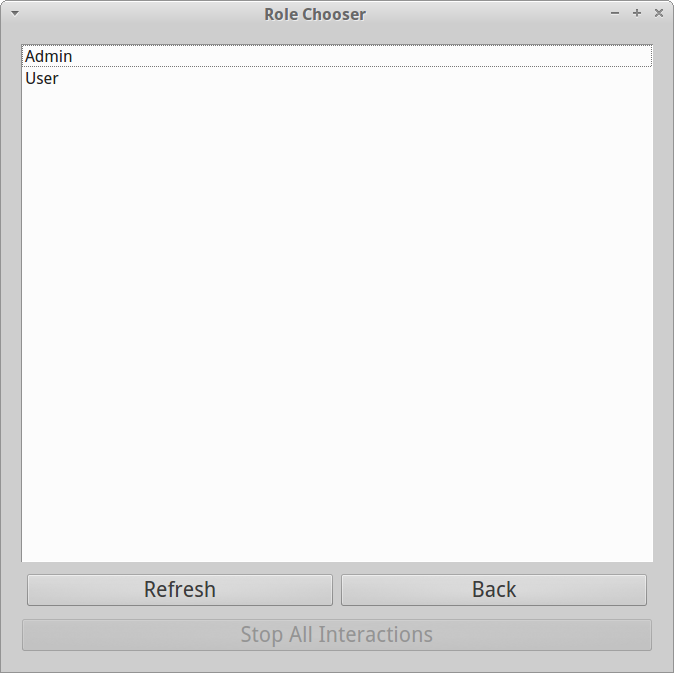
选择 Gazebo Concert.
选择 User.
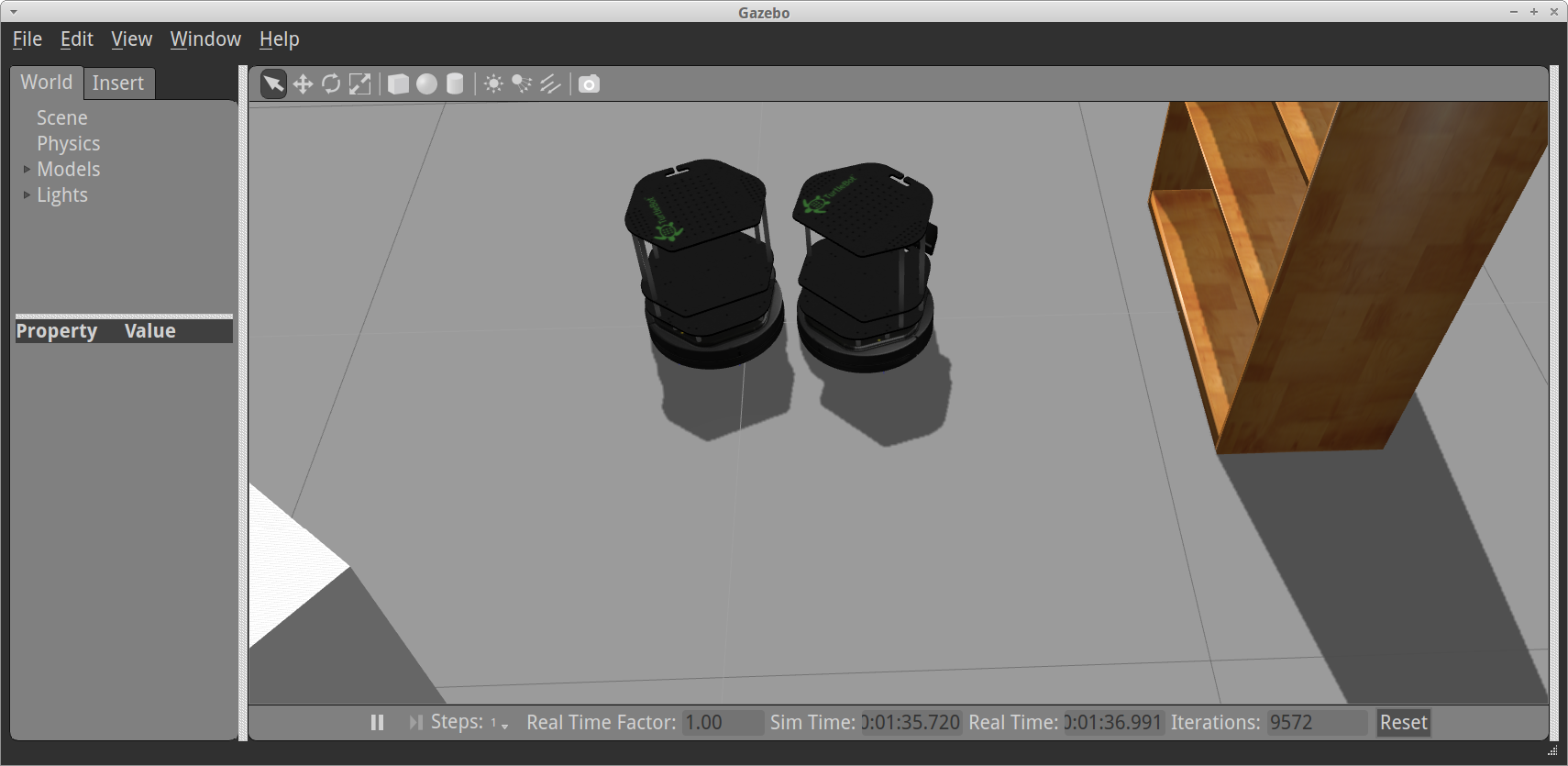
- 选择Gazebo Viewer.
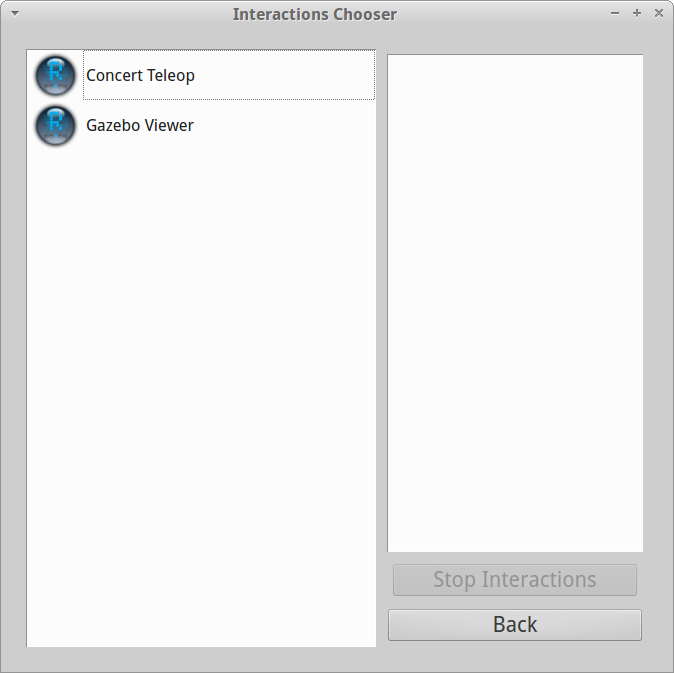
你可以看到两个turtlebots!
- 选择
Concert TeleopinInteractions Chooser.你可以看到:
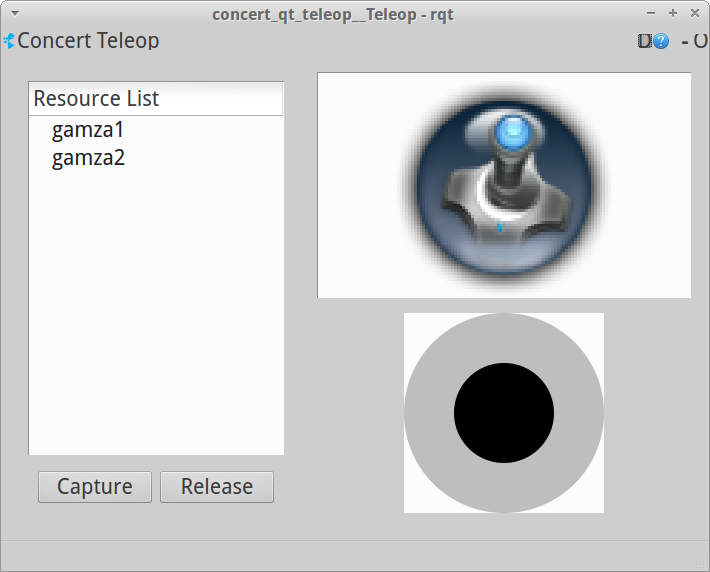
- 在“资源列表”中选择“机器人”并将其捕获。
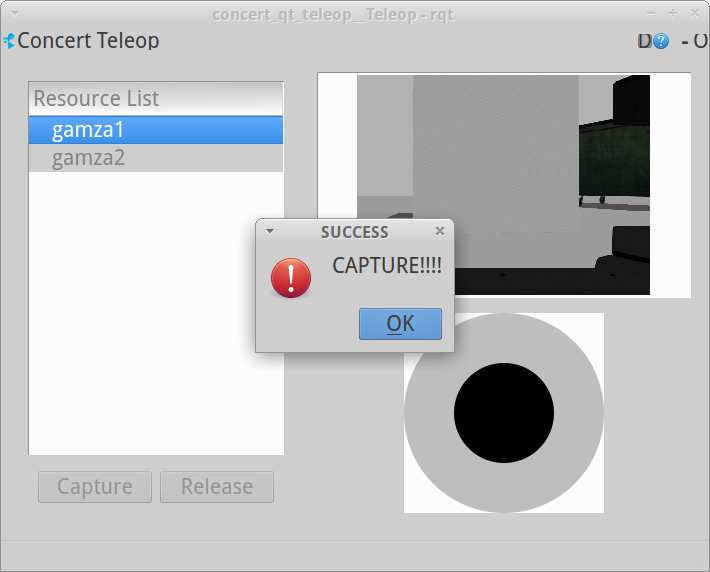
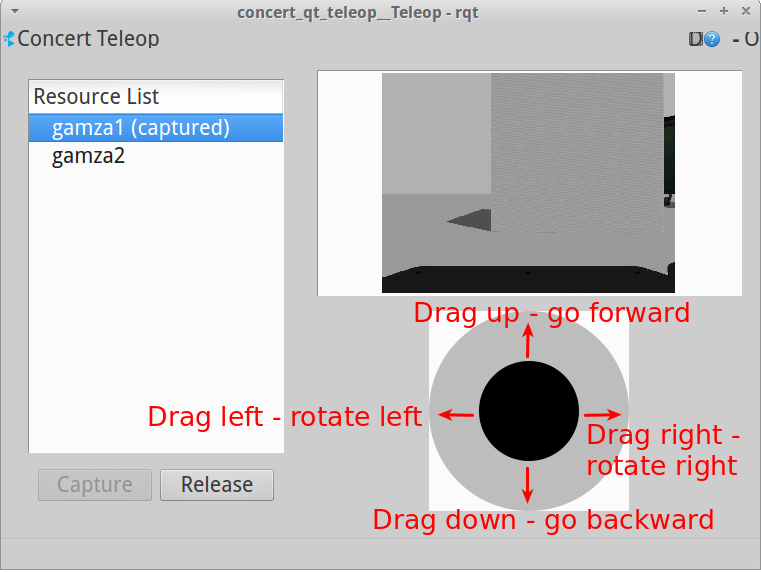
- 注意:您可以打开每个机器人teleop和控制。
- 你可以使用操纵杆驱动机器人。
完成选择版本。
中断进程。关闭窗口。
- 您可以添加新的机器人在模拟的
gazebo_concert包编辑gazebo.parameters文件。 - 更多关于该项目的维基ROS。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号