



















Turtlebot仿真-创建地图
创建地图
- 这节课展示了如何建立一个地图,让机器人记住环境。
- turtlebot可以自主使用地图导航。
创建一个地图
- 为地图创建一个文件夹。
mkdir ~/turtlebot_custom_maps
- 推出Gazebo的世界。
roslaunch turtlebot_gazebo turtlebot_world.launch
- 启动地图建设。
roslaunch turtlebot_gazebo gmapping_demo.launch
- 使用rviz的地图构建过程可视化。
roslaunch turtlebot_rviz_launchers view_navigation.launch
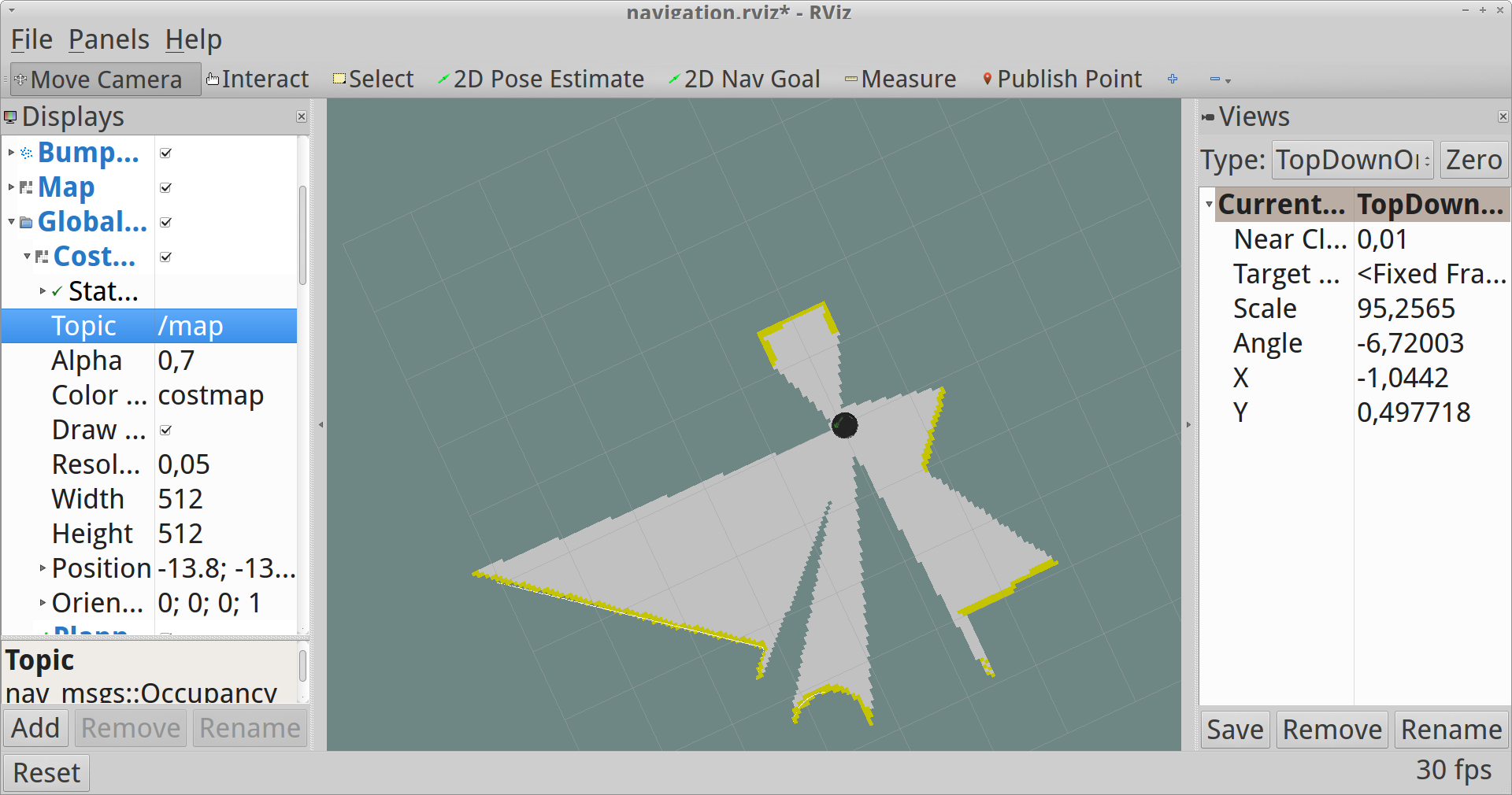
- 改变选项。
Local map->Costmap->Topic(从下拉列表中选择/map)。在图片上看到:

- 改变选项.
Global map->Costmap->Topic (从下拉列表中选择/map).
- 启动键盘.
roslaunch turtlebot_teleop keyboard_teleop.launch
- 注:如果你希望你可以使用其他工具,例如互动标记,在这里找到信息。
- 驱动turtlebot周围转动。
注:与键盘启动的窗口需要一致启动,否则你将无法操作turtlebot。
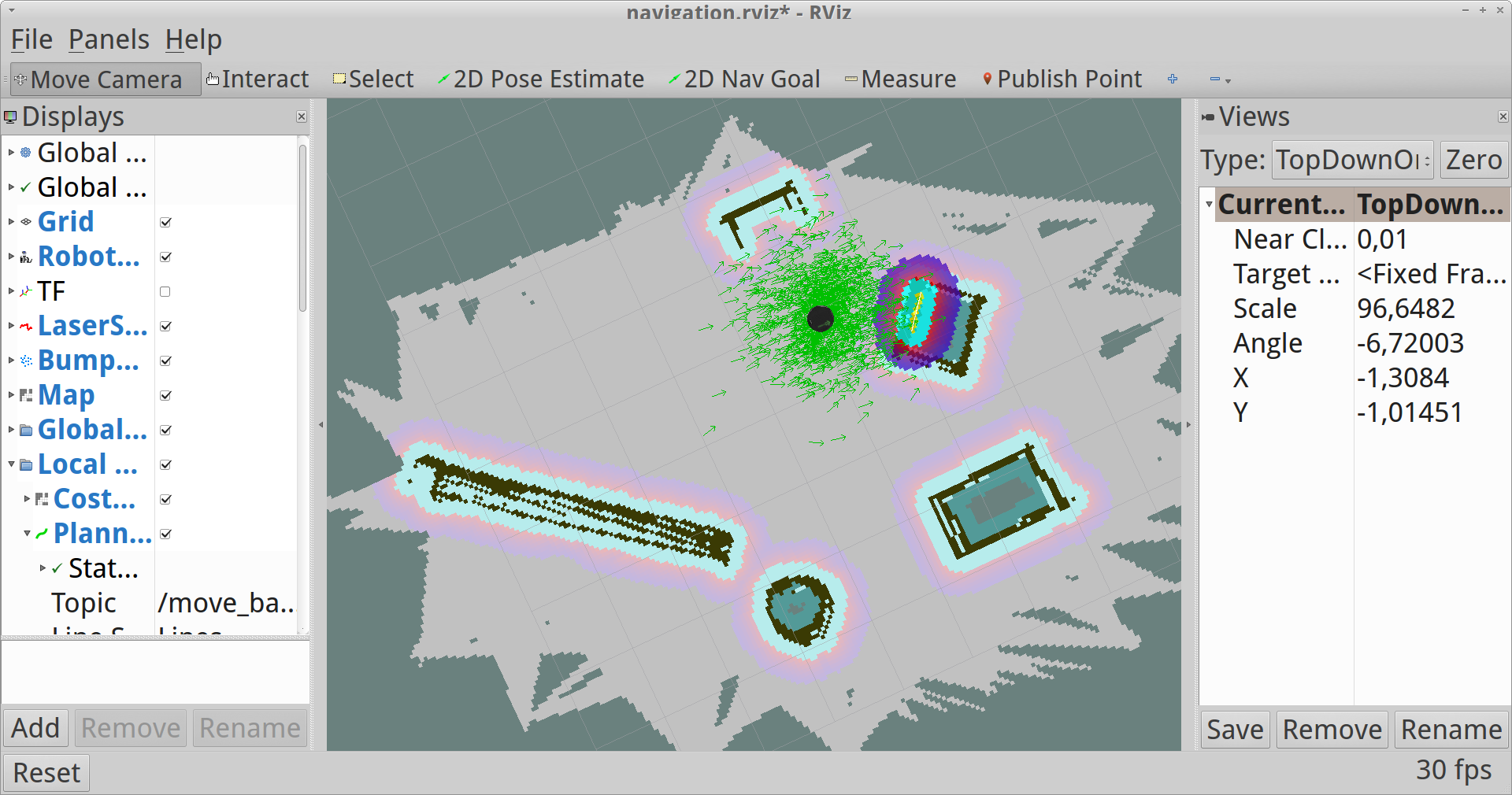
这是一张360度转弯的图片:
- 保存一张地图,当你的照片是足够好(像这样)。
rosrun map_server map_saver -f /home/<user_name>/turtlebot_custom_maps/tutorial
- 中断进程并关闭终端。
测试新地图
- 我们可以测试我们的工作结果。
- 启动gazebo,并使用默认地图。
roslaunch turtlebot_gazebo turtlebot_world.launch
- 启动导航演示。
roslaunch turtlebot_gazebo amcl_demo.launch map_file:=/home/<user_name>/turtlebot_custom_maps/tutorial.yaml
- 如果你没有自己的地图,你可以启动游戏世界的默认地图。
- 运行此命令:
roslaunch turtlebot_gazebo amcl_demo.launch
- 启动Rviz.
roslaunch turtlebot_rviz_launchers view_navigation.launch
- 如果你看到这样的图片,然后创建地图已成功实现。
- 注:我们将向你解释下一个教程中的新元素的含义。
- 中断进程并关闭终端。
- 我们刚刚检查过,一切都很好。
- 我们将学习如何使用在下一节课中自主导航的地图。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号