



















Turtlebot仿真-编辑仿真的世界
编辑仿真的世界
- 在以前的经验教训中,我们遇到了模拟世界。
- 我们知道如何在它里面移动,改变相机视图。
- 在这一课中,我们将学习如何选择一个模拟世界,创造一个新的世界,编辑现有的世界。
指定模拟世界
- 我们使用下面的命令来运行世界的Gazebo :
roslaunch turtlebot_gazebo turtlebot_world.launch
- roslaunch是一个重要的管理工具,启动和停止的ROS的过程。
- 许多的ROS程序用来启动文件,你可以运行:
roslaunch <package-name> <launch-filename> [args]
- 用这个命令:
roslaunch turtlebot_gazebo turtlebot_world.launch
turtlebot_gazebo是包的名称和turtle_world.launch是启动文件。- 我们可以指定要使用的世界
world_file:
roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=<full path to the world file>
- 你可以在这个文件夹中找到存在的世界文件选择
/opt/ros/indigo/share/turtlebot_gazebo/worlds。 - 尝试运行
corridor.world
roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=/opt/ros/indigo/share/turtlebot_gazebo/worlds/corridor.world
- 你会看到这个世界:

- 默认的世界是在环境变量
turtlebot_gazebo_world_file。 - 你可以看到它运行这个命令:
echo $TURTLEBOT_GAZEBO_WORLD_FILE
# Output:
/opt/ros/indigo/share/turtlebot_gazebo/worlds/playground.world
- 你可以更新它:
- 对于当前的终端运行这个命令:
TURTLEBOT_GAZEBO_WORLD_FILE=<full path to the world file>
- 对于所有运行此命令的新终端:
echo "export TURTLEBOT_GAZEBO_WORLD_FILE=<full path to the world file>" >> .bashrc
- 它将在重新启动的终端工作。
发射一个空的世界:
- 为新的世界创建一个文件夹:
mkdir ~/turtlebot_custom_gazebo_worlds
- 发布一个空的世界:
roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=/opt/ros/indigo/share/turtlebot_gazebo/worlds/empty.world
- 你会看到:
编辑一个世界:
- 可以从模型数据库中添加简单的形状对象和对象。
- 选择“
Insert插入”选项卡。
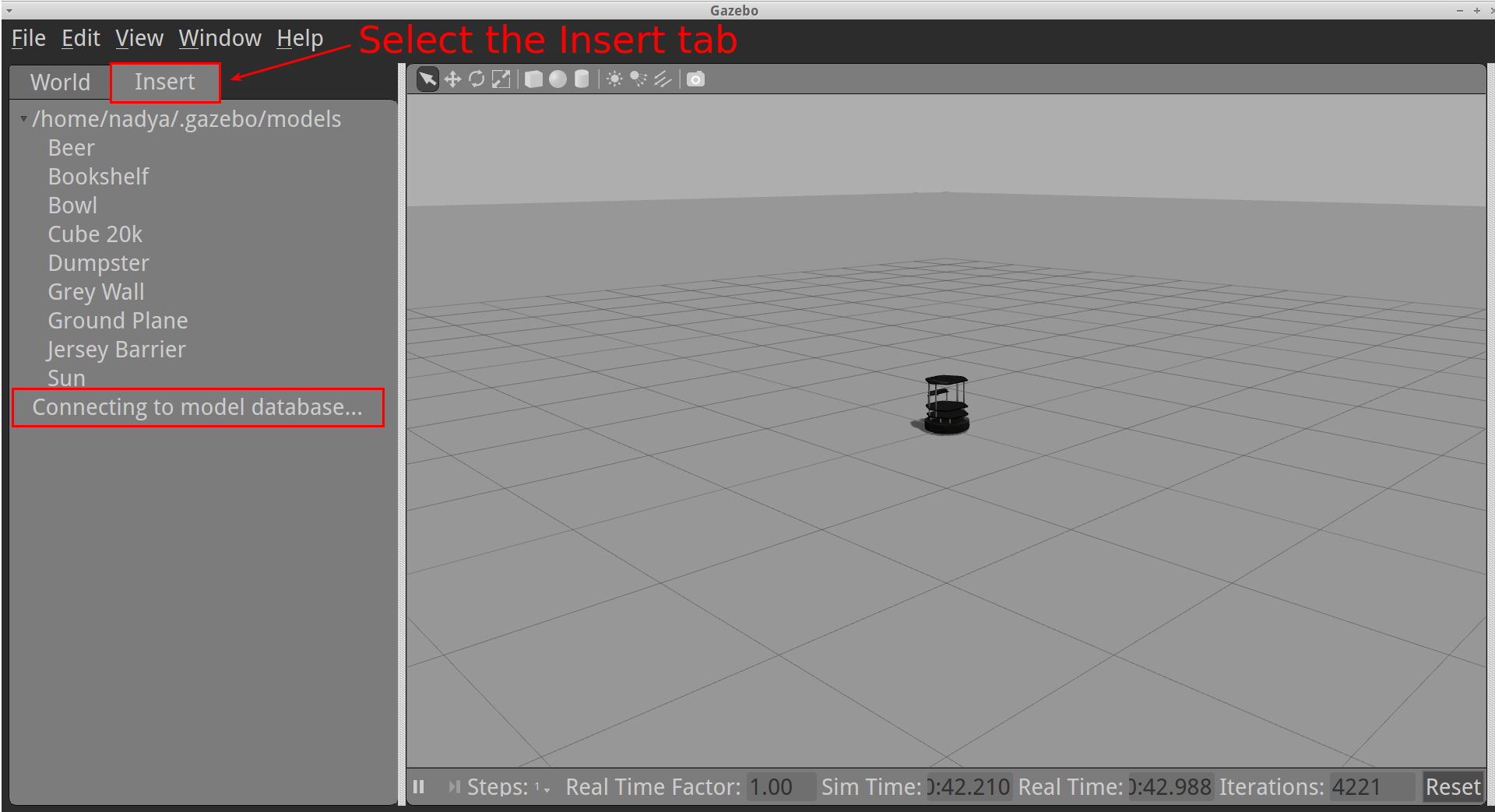
- 注意:您可以看到
Connecting to model database连接到模型数据库。 - 这可能需要很长的时间连接到gazebo的模型数据库。
- 连接后,你会看到这张照片:
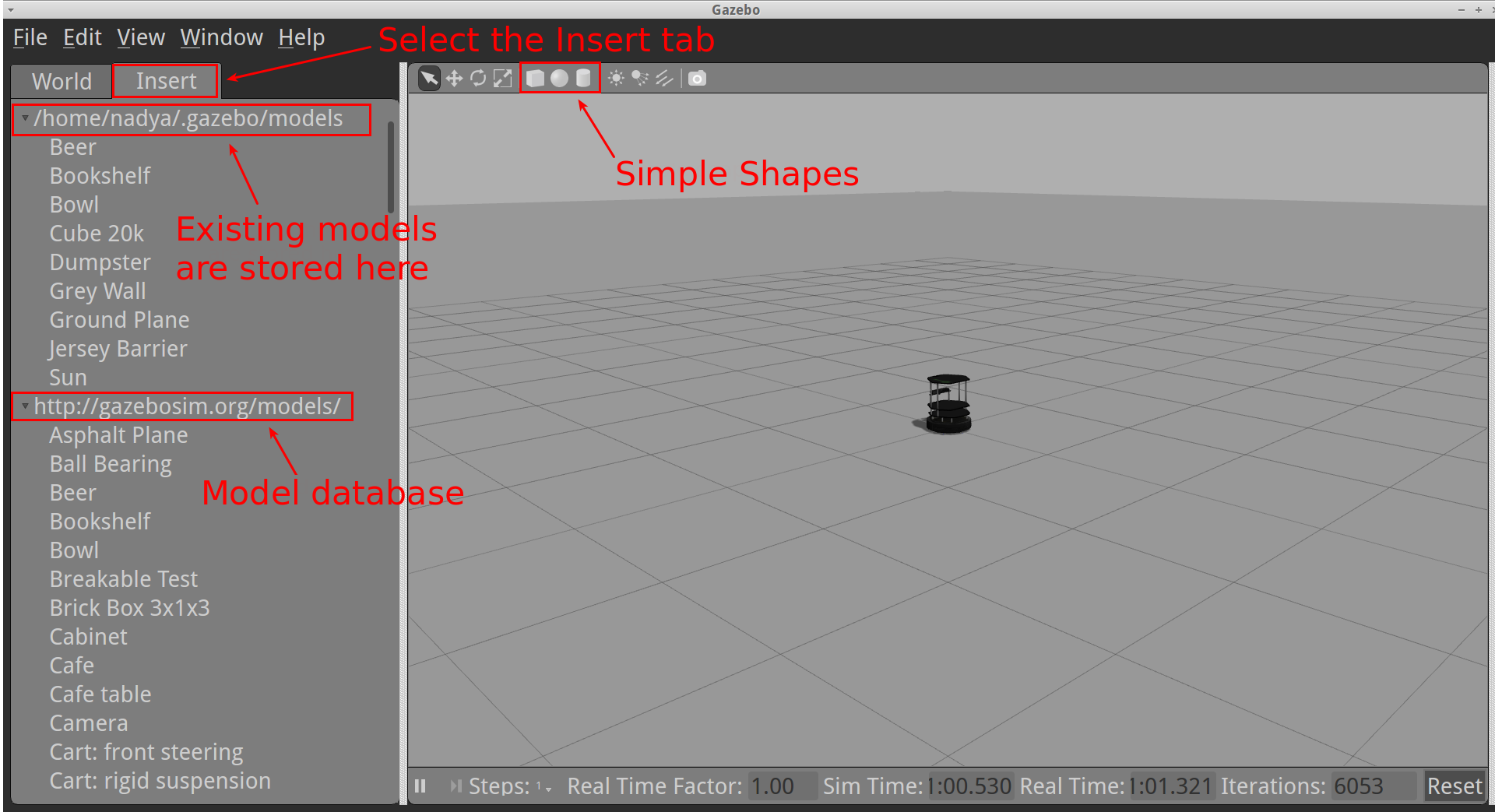
- 添加一个盒子。
- 选择框图标,然后将鼠标移到渲染窗口上。
- 当您选择框的适当位置时,请单击“左”键。
添加一个球体和一个圆柱体。
添加一个书架。
- 选择要访问模型数据库的“插入”选项卡。
- 选择书架。将它添加到渲染窗口。
- 注:这可能需要一些时间来从Gazebo的模型数据库下载模型。
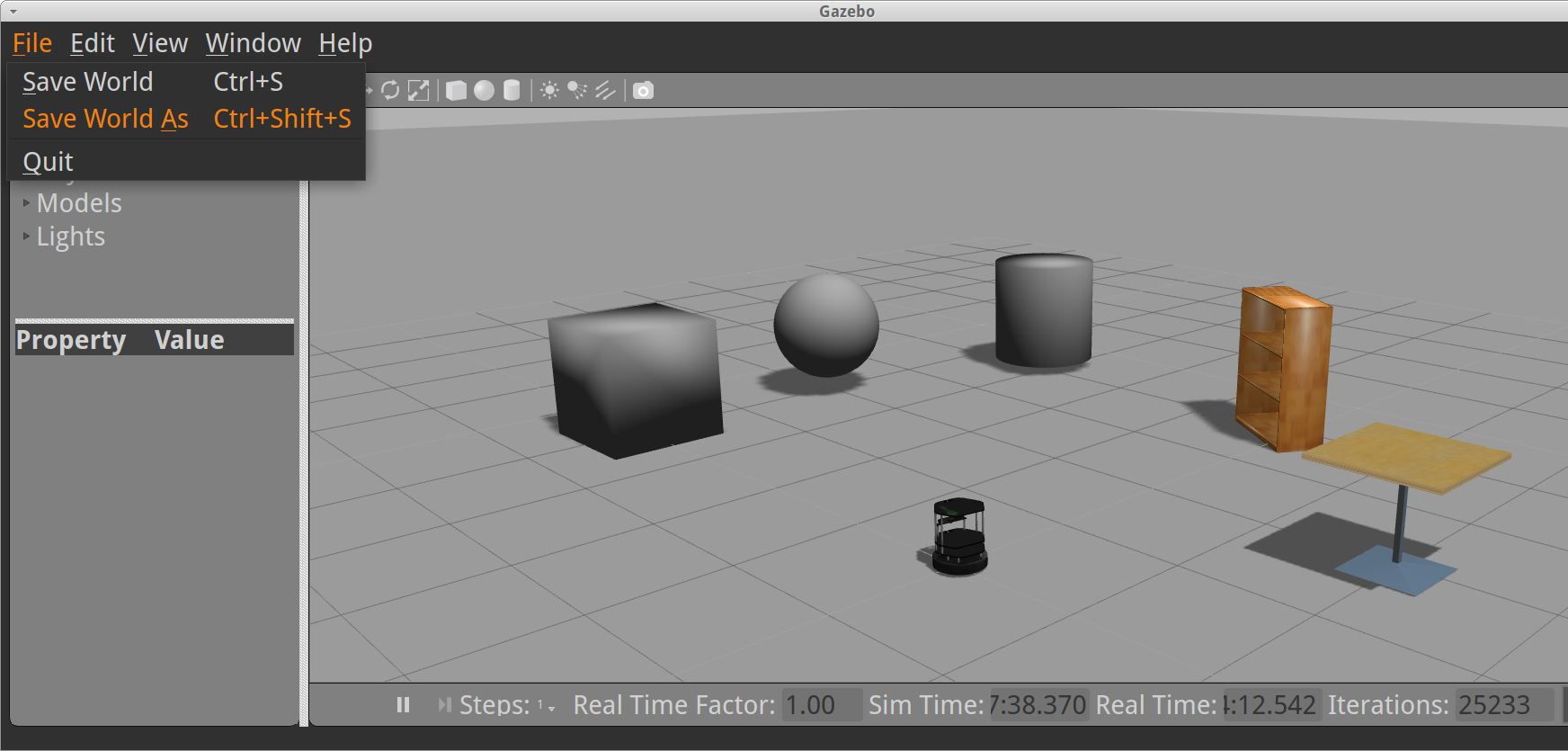
- 添加一个咖啡桌和一个垃圾站。
- 你应该有类似于这张照片的东西:

- 你可以在图片上看到如何修改每个模型的姿势。
- 模型可以通过右键点击删除模型并选择删除。删除垃圾箱。

保存一个新世界
- 选择“文件”菜单并选择“保存”
- 将出现一个弹出窗口,要求您选择一个文件夹,并输入一个新的文件名。
- 选择
turtlebot_custom_gazebo_worlds文件夹类型tutorial.world,然后点击保存。 - 在终端按Ctrl + C,现在你可以启动你的世界:
roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=/home/<user_name>/turtlebot_custom_gazebo_worlds/tutorial.world
- 在下一节课中,我们将使用这个命令:
roslaunch turtlebot_gazebo turtlebot_world.launch
- 用默认的世界
/opt/ros/indigo/share/turtlebot_gazebo/worlds/playground.world
- 或者我们将指定命令中的世界文件:
roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=<full path to the world file>
读什么
- 你可以在这里阅读更多关于roslaunch。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号